Vous aimerez peut-être aussi
- Wii U Architecture: Architecture of Consoles: A Practical Analysis, #21D'EverandWii U Architecture: Architecture of Consoles: A Practical Analysis, #21Pas encore d'évaluation
- Jeff Keyzer-Hacking The Asus WL520gUDocument41 pagesJeff Keyzer-Hacking The Asus WL520gUAgus DiansyahPas encore d'évaluation
- ES Lecture Sept28 - MCs Vs Onboard ComputersDocument35 pagesES Lecture Sept28 - MCs Vs Onboard ComputersAbhishek KumarPas encore d'évaluation
- Lenovo Ideapad S10 Classic White Lenovo Ideapad S10 Deep BlueDocument5 pagesLenovo Ideapad S10 Classic White Lenovo Ideapad S10 Deep Bluesafraj5003Pas encore d'évaluation
- Introduction To Single Board ComputingDocument12 pagesIntroduction To Single Board ComputingPasan navodyaPas encore d'évaluation
- Thinkcentre M92Z All-In-One: Lenovo Thinkcentre M92Z With Frame Stand Lenovo Thinkcentre M92Z With Monitor StandDocument32 pagesThinkcentre M92Z All-In-One: Lenovo Thinkcentre M92Z With Frame Stand Lenovo Thinkcentre M92Z With Monitor StandfatharabhimanyuPas encore d'évaluation
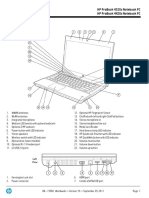
- HP ProBook 4320sDocument40 pagesHP ProBook 4320sJon PerezPas encore d'évaluation
- ThinkPad T430s PDFDocument15 pagesThinkPad T430s PDFSepaleng BaePas encore d'évaluation
- Cpu & Gpu en Raspberry Pi 3: Dr. Adolfo Meléndez RamírezDocument21 pagesCpu & Gpu en Raspberry Pi 3: Dr. Adolfo Meléndez RamírezPablo RecaldePas encore d'évaluation
- Jetson - Nano: On Board ComputerDocument48 pagesJetson - Nano: On Board ComputerAbhishek KumarPas encore d'évaluation
- 5.3 Unit-V Developing Applications Through IoT ToolsDocument8 pages5.3 Unit-V Developing Applications Through IoT ToolsGostudy LifePas encore d'évaluation
- Evo n800v Q SpecDocument24 pagesEvo n800v Q SpeccudradvaPas encore d'évaluation
- Allwinner H3 Boards Comparison Tables With Orange Pi, Banana Pi M2+, Nanopi P1, and H3-Olinuxino-Nano BoardsDocument56 pagesAllwinner H3 Boards Comparison Tables With Orange Pi, Banana Pi M2+, Nanopi P1, and H3-Olinuxino-Nano BoardsFelipePas encore d'évaluation
- Specifications: Working With PassionDocument2 pagesSpecifications: Working With PassionYangPas encore d'évaluation
- What Is The Difference Between Arduino Nano and Arduino MicroDocument9 pagesWhat Is The Difference Between Arduino Nano and Arduino MicrojackPas encore d'évaluation
- DE10-Nano Development Kit: TerasicDocument4 pagesDE10-Nano Development Kit: Terasicsfds fsdaaaPas encore d'évaluation
- Chapter 7Document21 pagesChapter 7385swayamPas encore d'évaluation
- ThinkPad Yoga460 SpecsDocument1 pageThinkPad Yoga460 SpecsKissMe Plz468Pas encore d'évaluation
- ThinkPad 11e SpecDocument1 pageThinkPad 11e Specasepla420Pas encore d'évaluation
- IOT - Hardware Day 3Document21 pagesIOT - Hardware Day 3Manoj KavediaPas encore d'évaluation
- Catalogo TexasDocument17 pagesCatalogo TexasalbertPas encore d'évaluation
- Portégé M200/205 SeriesDocument6 pagesPortégé M200/205 Seriesasif-ranaPas encore d'évaluation
- Lenovo Thinkpad NotebooksDocument222 pagesLenovo Thinkpad NotebooksmaldelreyPas encore d'évaluation
- FICHA ThinkBook 14 IML SpecDocument6 pagesFICHA ThinkBook 14 IML Specrobinson montañoPas encore d'évaluation
- T410 SpecDocument121 pagesT410 SpecblenhiemPas encore d'évaluation
- Sti5518 ProjectDocument5 pagesSti5518 ProjectDedi DrafterPas encore d'évaluation
- ThinkPad X1 Carbon 1st Gen WEDocument10 pagesThinkPad X1 Carbon 1st Gen WEnajjaciPas encore d'évaluation
- TheHackersHardwareToolkit PDFDocument139 pagesTheHackersHardwareToolkit PDFMiguel G. MachoPas encore d'évaluation
- Project of Laptop's Importation: Integrants: Paul Cornejo Lisbeth Pasapera Estefany Peña Ronny Ríos Alejandra RojasDocument33 pagesProject of Laptop's Importation: Integrants: Paul Cornejo Lisbeth Pasapera Estefany Peña Ronny Ríos Alejandra RojasPatricia GuevaraPas encore d'évaluation
- Lenovo Thinkpad T430 Lenovo Thinkpad T430Document15 pagesLenovo Thinkpad T430 Lenovo Thinkpad T430Noe HernadezPas encore d'évaluation
- HP Compaq NC6000 SpecificationsDocument33 pagesHP Compaq NC6000 SpecificationsSamed TalovićPas encore d'évaluation
- Personal Systems Reference Lenovo Thinkpad Edge Series and SL Series NotebooksDocument36 pagesPersonal Systems Reference Lenovo Thinkpad Edge Series and SL Series NotebooksIonLeveanuPas encore d'évaluation
- Ags PrimusDocument1 pageAgs PrimusGireesh HegdePas encore d'évaluation
- Hacking The KinectDocument32 pagesHacking The KinectGustavo Carnevali MendesPas encore d'évaluation
- ThinkPad L450 SpecDocument1 pageThinkPad L450 Specdeiby yesid valencia rubioPas encore d'évaluation
- TheHackersHardwareToolkit PDFDocument184 pagesTheHackersHardwareToolkit PDFAshish Dwivedi100% (3)
- JETIR2010455Document4 pagesJETIR2010455Syed AfwAnPas encore d'évaluation
- Raspberry Pi For Beginners & Advanced Users The Comprehensive Raspberry Pi Mastery GuideDocument94 pagesRaspberry Pi For Beginners & Advanced Users The Comprehensive Raspberry Pi Mastery GuideTigabu YayaPas encore d'évaluation
- Introduction To Microcontrollers: Jerry Spring VE6TLDocument51 pagesIntroduction To Microcontrollers: Jerry Spring VE6TLManoel Lopes100% (1)
- TheHackersHardwareToolkit PDFDocument130 pagesTheHackersHardwareToolkit PDFMega Met X100% (1)
- TheHackersHardwareToolkit PDFDocument130 pagesTheHackersHardwareToolkit PDFjohann.arispe100% (3)
- Price ListDocument1 pagePrice Listvhan5688287100% (1)
- Price ListDocument1 pagePrice Listvhan5688287Pas encore d'évaluation
- Price ListDocument1 pagePrice Listvhan5688287Pas encore d'évaluation
- Apple AssignmentDocument17 pagesApple Assignmentriya vermaPas encore d'évaluation
- pcm-9361 DATA SHEETDocument3 pagespcm-9361 DATA SHEETAyman MaezaPas encore d'évaluation
- Perbandingan Dan Spesifikasi Notebook Yang SetaraDocument2 pagesPerbandingan Dan Spesifikasi Notebook Yang SetaraFajar HaryadiPas encore d'évaluation
- Lenovo Thinkpad T530 Lenovo Thinkpad T530Document18 pagesLenovo Thinkpad T530 Lenovo Thinkpad T530CoreyPas encore d'évaluation
- Personal Systems Reference Lenovo 3000 and Essential Desktops 2006 - 2013 WithdrawnDocument65 pagesPersonal Systems Reference Lenovo 3000 and Essential Desktops 2006 - 2013 WithdrawnNorangel DavilaPas encore d'évaluation
- Notebook ComparisonDocument3 pagesNotebook Comparisona4agarwalPas encore d'évaluation
- Tiny Form Factor With Lots of Flexibility: Compact and Expandable Flexible For Work Secure and ManageableDocument2 pagesTiny Form Factor With Lots of Flexibility: Compact and Expandable Flexible For Work Secure and ManageablejohnPas encore d'évaluation
- Imac (Late 2006) - Technical SpecificationsDocument4 pagesImac (Late 2006) - Technical Specificationssonoiojohn1417Pas encore d'évaluation
- ThinkPad T450s Platform SpecificationsDocument1 pageThinkPad T450s Platform SpecificationsisraelmpPas encore d'évaluation
- GMAD00246010 - SatC640-C650 Laptop ToshibaDocument2 pagesGMAD00246010 - SatC640-C650 Laptop ToshibaBayu TirtaPas encore d'évaluation
- Thinkcentre M93/M93P Tiny Platform Specifications: Product Specifications Reference (Psref)Document1 pageThinkcentre M93/M93P Tiny Platform Specifications: Product Specifications Reference (Psref)hariPas encore d'évaluation
- Ib Nas4220 B - Uk1Document2 pagesIb Nas4220 B - Uk1John JohnsonPas encore d'évaluation
- Com. OrgDocument3 pagesCom. OrgJoy TignoPas encore d'évaluation
- Ltwbook 2013 PDFDocument709 pagesLtwbook 2013 PDFMalosisimo MaloPas encore d'évaluation
- Unit 2 Computer Systems Assignment 2 Task 1 P4 and M2 Name: Minimum RequirementDocument10 pagesUnit 2 Computer Systems Assignment 2 Task 1 P4 and M2 Name: Minimum Requirementapi-448586797Pas encore d'évaluation
- Ideapad S145 14IGM SpecDocument1 pageIdeapad S145 14IGM SpecHella Mae RambunayPas encore d'évaluation
- Uses of MSDocument3 pagesUses of MSTalha IqbalPas encore d'évaluation
- El Iec61215-2 2016Document6 pagesEl Iec61215-2 2016Venkataramanan SPas encore d'évaluation
- 24-Port 10/100/1000T 802.3at Poe + 4-Port Gigabit TP/SFP Combo Managed SwitchDocument9 pages24-Port 10/100/1000T 802.3at Poe + 4-Port Gigabit TP/SFP Combo Managed SwitchAzmey Azyz PratamaPas encore d'évaluation
- Chapter 2 Campus Area Network Server Configurations 2.5Document32 pagesChapter 2 Campus Area Network Server Configurations 2.5PREEVITHAPas encore d'évaluation
- Student Handbook - Tech Course IDocument4 pagesStudent Handbook - Tech Course I5129 SRI RAM SPas encore d'évaluation
- 9852 1007 01d Maintenance Instr COP 1840HE, HEXDocument19 pages9852 1007 01d Maintenance Instr COP 1840HE, HEXButnariu CristianPas encore d'évaluation
- Digital Content Manager Version 21.00 Installation GuideDocument48 pagesDigital Content Manager Version 21.00 Installation Guideandlee74Pas encore d'évaluation
- Synthesis PaperDocument12 pagesSynthesis Paperapi-446695789Pas encore d'évaluation
- Burner Application Example TIAP DOC v102 enDocument171 pagesBurner Application Example TIAP DOC v102 enErdincPas encore d'évaluation
- WatchiTV User Guide English v4Document74 pagesWatchiTV User Guide English v4cyr111ePas encore d'évaluation
- Midea Mdf3 20den3Document14 pagesMidea Mdf3 20den3Vladimir StakićPas encore d'évaluation
- Design, Analysis and Simulation of Linear Model of A STATCOM For Reactive Power Compensation With Variation of DC-link VoltageDocument7 pagesDesign, Analysis and Simulation of Linear Model of A STATCOM For Reactive Power Compensation With Variation of DC-link VoltageAtiqMarwatPas encore d'évaluation
- Memorex MT1191V - MT1131A-32176 PDFDocument23 pagesMemorex MT1191V - MT1131A-32176 PDFdomador1624Pas encore d'évaluation
- Electric Forklift Trucks 7FBMF 16,18 7FBMF 20,25 7FBMF 30,35 7FBMF 40,45,50Document23 pagesElectric Forklift Trucks 7FBMF 16,18 7FBMF 20,25 7FBMF 30,35 7FBMF 40,45,50Tieko TuijnmanPas encore d'évaluation
- Expt 8 - Satellite Communication Audio and VideoDocument4 pagesExpt 8 - Satellite Communication Audio and VideosamarthPas encore d'évaluation
- AEROMAG LAKOTA Dealer Brochure Wind TurbinesDocument4 pagesAEROMAG LAKOTA Dealer Brochure Wind TurbinesAldana OrlenePas encore d'évaluation
- Chapter 13 The Future of InformationDocument19 pagesChapter 13 The Future of InformationKhairul bariahPas encore d'évaluation
- ABB Project Electrical Typical Cable Galnd LugDocument6 pagesABB Project Electrical Typical Cable Galnd LugharryPas encore d'évaluation
- Wor ShopDocument4 pagesWor ShopDavid Santiago Ayala RodriguezPas encore d'évaluation
- A Tours and Travels Management SystemDocument19 pagesA Tours and Travels Management SystemZeenat SiddiquePas encore d'évaluation
- Java MCQ QuestionsDocument11 pagesJava MCQ QuestionsPineapplePas encore d'évaluation
- Bitdefender AntivirusDocument4 pagesBitdefender AntivirusMohd Jamil PatahPas encore d'évaluation
- IRIS EN Sports Long Audio Transcription Project: Platform Introduction ForDocument10 pagesIRIS EN Sports Long Audio Transcription Project: Platform Introduction ForRaihan UmranPas encore d'évaluation
- L90 Line Current Differential System: Digital EnergyDocument770 pagesL90 Line Current Differential System: Digital EnergyVíctor CasadoPas encore d'évaluation
- PLCDocument21 pagesPLCThiagoLiraPas encore d'évaluation
- Newton Programmer's Guide (Alpha Draft 1.1)Document894 pagesNewton Programmer's Guide (Alpha Draft 1.1)pablo_marxPas encore d'évaluation
- Anna University Tiruchirappalli Tiruchirappalli - 620 024: Regulations 2007 Curriculum M.E. Software EngineeringDocument31 pagesAnna University Tiruchirappalli Tiruchirappalli - 620 024: Regulations 2007 Curriculum M.E. Software EngineeringRevathy GmPas encore d'évaluation
- Network Security & Cryptography: Paper ONDocument10 pagesNetwork Security & Cryptography: Paper ONapi-19799369Pas encore d'évaluation
- Jlpt n5公式問題集 PDFDocument1 pageJlpt n5公式問題集 PDFShiaoying LeongPas encore d'évaluation
- HP 6220 6050a0066801-Mb-A02 SchematicsDocument68 pagesHP 6220 6050a0066801-Mb-A02 SchematicsGerman ValenciaPas encore d'évaluation