Vous aimerez peut-être aussi
- Apt 1Document18 pagesApt 1Vishal JalanPas encore d'évaluation
- Apt 1Document18 pagesApt 1Vishal JalanPas encore d'évaluation
- SonataDocument7 pagesSonataSiva Prasad100% (1)
- Tri Gate TransistorsDocument22 pagesTri Gate TransistorsSiva PrasadPas encore d'évaluation
- 101 Shortcuts in Math Anyone Can Do Gordon RockmakerDocument95 pages101 Shortcuts in Math Anyone Can Do Gordon RockmakerLeopold LasetPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- B777 Air SystemsDocument0 pageB777 Air SystemsJOUO20009167Pas encore d'évaluation
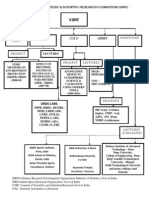
- VSRF Profile LatestmodifyDocument8 pagesVSRF Profile LatestmodifyBharath KumarPas encore d'évaluation
- Interview For AirlineDocument42 pagesInterview For Airlinekerem96% (27)
- Beechcraft Duke B60 Pilot ChecklistDocument2 pagesBeechcraft Duke B60 Pilot ChecklistSkkuda100% (3)
- 1100G-JM-LBM - 00 - Front Matter PDFDocument6 pages1100G-JM-LBM - 00 - Front Matter PDFPkjhaPas encore d'évaluation
- Vector Project BspectorDocument10 pagesVector Project Bspectorapi-310035955Pas encore d'évaluation
- Drag CalculationDocument17 pagesDrag Calculationkyadav001Pas encore d'évaluation
- Strange TimesDocument229 pagesStrange TimesDeontos100% (2)
- Aircraft Maintenance DissertationDocument6 pagesAircraft Maintenance DissertationCustomPapersReviewUK100% (1)
- Aug 10 QuestionDocument118 pagesAug 10 QuestionAyaan KhanPas encore d'évaluation
- Advances in Unmanned Aerial Vehicles TechnologiesDocument14 pagesAdvances in Unmanned Aerial Vehicles TechnologiesNAENWI YAABARIPas encore d'évaluation
- First Age 01 - The Sword and The Dagger - BattletechDocument213 pagesFirst Age 01 - The Sword and The Dagger - Battletechbattleebook91% (11)
- Citation Study GuideDocument39 pagesCitation Study GuideJose Lara100% (4)
- Fb25 7 PDFDocument2 pagesFb25 7 PDFJanet50% (2)
- Part 145 Approvals-User Guide For MOEDocument84 pagesPart 145 Approvals-User Guide For MOEKedar Pradhanang100% (2)
- Balancing LectureDocument32 pagesBalancing LecturemevenkatesanPas encore d'évaluation
- Nate Cain Math 1010 Eportfolio Zero-G Flight PathDocument4 pagesNate Cain Math 1010 Eportfolio Zero-G Flight Pathapi-253544451Pas encore d'évaluation
- Mechanics of Fluids Rr220301Document8 pagesMechanics of Fluids Rr220301Nizam Institute of Engineering and Technology LibraryPas encore d'évaluation
- Chapter 06 Pressure Losses in The Circulating SystemDocument22 pagesChapter 06 Pressure Losses in The Circulating SystemAbrar HassanPas encore d'évaluation
- TurtleSkin WaterArmor InformationDocument2 pagesTurtleSkin WaterArmor InformationtsantiagotiwllPas encore d'évaluation
- Ingles Sebastian Barrera 901: Spent UsedDocument3 pagesIngles Sebastian Barrera 901: Spent Usedsebastian barreraPas encore d'évaluation
- IADC Safety Alert Sa-07-03Document1 pageIADC Safety Alert Sa-07-03Marutpal MukherjeePas encore d'évaluation
- TOM Syllabus Recovered)Document130 pagesTOM Syllabus Recovered)Divakar RanjanPas encore d'évaluation
- A Report of The Student Industrial Work Experience SchemeDocument11 pagesA Report of The Student Industrial Work Experience SchemeFavour OgbonnaPas encore d'évaluation
- Fi 2Document41 pagesFi 2shankar sachinPas encore d'évaluation
- Ce 455Document205 pagesCe 455IRFAN IBRAHIMPas encore d'évaluation
- Mary Grace Baltazar Alqueza Z2 763 29 May 18 05:05: Manila (MNL) Cebu (CEB) IU743EDocument5 pagesMary Grace Baltazar Alqueza Z2 763 29 May 18 05:05: Manila (MNL) Cebu (CEB) IU743EJoshuaPas encore d'évaluation
- 8 Wing / CFB Trenton Welcome DirectoryDocument75 pages8 Wing / CFB Trenton Welcome Directorymusgrave762Pas encore d'évaluation
- Rossell IndiaDocument26 pagesRossell IndiaDuby RexPas encore d'évaluation
- Airport Engineering Multiple Choice Questions and Answers Download Free PDF - Preparation For EngineeringDocument7 pagesAirport Engineering Multiple Choice Questions and Answers Download Free PDF - Preparation For Engineeringtender10100% (2)