Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Em - 16 MarksDocument14 pagesEm - 16 MarkskesavantPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Static Excitation of An Alternator - Electrical MachinesDocument4 pagesStatic Excitation of An Alternator - Electrical Machineslim wyPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- HCI634H (Alternator - HCI634H)Document8 pagesHCI634H (Alternator - HCI634H)Angga D SantosoPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Alternator Working and Its Diagnosing - An Automotive Charging CircuitDocument23 pagesAlternator Working and Its Diagnosing - An Automotive Charging Circuitvijay anandhPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Section - 1: Meo Class 4 - Electrical Oral Questions With AnswersDocument81 pagesSection - 1: Meo Class 4 - Electrical Oral Questions With Answersbaba maachoPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Three Phase Induction Motor Interview Questions 2 1Document24 pagesThree Phase Induction Motor Interview Questions 2 1Kulshresth Joshi100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Yang SHEN PHD Thesis-revised-FinalDocument241 pagesYang SHEN PHD Thesis-revised-FinalCazimir BostanPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
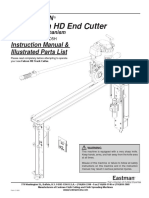
- 548 HD End CutterDocument36 pages548 HD End CuttercyroniusPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Ieee C50.12Document4 pagesIeee C50.12david_rosemberg33% (3)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Electric Motors For Electric VehiclesDocument15 pagesElectric Motors For Electric VehiclesFlavius Lungu100% (1)
- LSMV: The Variable Speed Solution For All ApplicationsDocument70 pagesLSMV: The Variable Speed Solution For All ApplicationsrealpaladinPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Brushless DC MotorsDocument7 pagesBrushless DC MotorsRonald LugwirePas encore d'évaluation
- A Comparative Study Between Aluminium and Copper Windings For A Modular-Wound IPM Electric MachineDocument8 pagesA Comparative Study Between Aluminium and Copper Windings For A Modular-Wound IPM Electric Machineabdoutik_917281996Pas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- SparesDocument252 pagesSparesMayank Joshi100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- 8 Speed Control Method of Induction MotoDocument12 pages8 Speed Control Method of Induction MotoJagabandhu KarPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Active Magnetic Bearings For Frictionless Rotating Machineries by Joga Dharma SetiawanDocument6 pagesActive Magnetic Bearings For Frictionless Rotating Machineries by Joga Dharma SetiawanNikkizGogasPas encore d'évaluation
- Siemens Basics of AC DrivesDocument116 pagesSiemens Basics of AC DrivesSleman ShackoorPas encore d'évaluation
- HCI5E 311 TD EN - Rev - A PDFDocument9 pagesHCI5E 311 TD EN - Rev - A PDFDilham BerrioPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Question and Answer AC MachinesDocument12 pagesQuestion and Answer AC MachinesVishal SawhPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Cheat Part 2Document5 pagesCheat Part 2mateiPas encore d'évaluation
- Wind Slides MergedDocument1 462 pagesWind Slides MergedAnonymous 8orcDiJ100% (1)
- Short Type Questions of Three Phase Induction Motor - 01.04.2020Document5 pagesShort Type Questions of Three Phase Induction Motor - 01.04.2020Amit DebnathPas encore d'évaluation
- A Synchronous Motor Cannot Start by ItselfDocument2 pagesA Synchronous Motor Cannot Start by ItselfRedwan AhmedPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Livro de Controle de MotorDocument376 pagesLivro de Controle de MotorNathan Xavier100% (1)
- Combustion Basics: The Fire Triangle / Fire TetrahedronDocument23 pagesCombustion Basics: The Fire Triangle / Fire TetrahedronangadpurPas encore d'évaluation
- Generator RotorDocument84 pagesGenerator RotorVENUPas encore d'évaluation
- Cyturn Englisch 2008Document44 pagesCyturn Englisch 2008skidamdnevnoPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- AERO-TECHNOLOGY - EASA - Module3 Electrical Fundamentals Question Part-1Document23 pagesAERO-TECHNOLOGY - EASA - Module3 Electrical Fundamentals Question Part-1PaulPrateekPas encore d'évaluation
- Tarby TitanDocument4 pagesTarby TitanAlberto HerreraPas encore d'évaluation
- SMMA Motor GlossaryDocument11 pagesSMMA Motor GlossaryNurulHardyPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)