Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Cmos Fabrication Technology and Design RulesDocument19 pagesCmos Fabrication Technology and Design RulesvenkatmusalaPas encore d'évaluation
- Signal BroadcastingDocument1 pageSignal BroadcastingVivek PanduPas encore d'évaluation
- Railway Reservation SystemDocument16 pagesRailway Reservation SystemVivek Pandu0% (1)
- 9.1 Cartesian Coordinates in Space: Handed If It Can Be Rotated So The Three Axes Are in This Position. FigureDocument4 pages9.1 Cartesian Coordinates in Space: Handed If It Can Be Rotated So The Three Axes Are in This Position. FigureVivek PanduPas encore d'évaluation
- Book Store Automation SystemDocument12 pagesBook Store Automation SystemGaurab DasPas encore d'évaluation
- NanoroboticsDocument43 pagesNanoroboticsparitosh_vm3627Pas encore d'évaluation
- Ac CircuitsDocument3 pagesAc CircuitsLea Jean ConsigoPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- GSE v. Dow - AppendixDocument192 pagesGSE v. Dow - AppendixEquality Case FilesPas encore d'évaluation
- Bobcat E34 - E35Z Brochure - Adare MachineryDocument8 pagesBobcat E34 - E35Z Brochure - Adare MachineryNERDZONE TVPas encore d'évaluation
- Investing in Granada's Property Market - Gaspar LinoDocument1 pageInvesting in Granada's Property Market - Gaspar LinoGaspar LinoPas encore d'évaluation
- 2012 Conference NewsfgfghsfghsfghDocument3 pages2012 Conference NewsfgfghsfghsfghabdPas encore d'évaluation
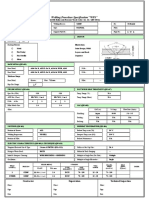
- Wps For Carbon Steel THK 7.11 GtawDocument1 pageWps For Carbon Steel THK 7.11 GtawAli MoosaviPas encore d'évaluation
- Preliminary Examination The Contemporary WorldDocument2 pagesPreliminary Examination The Contemporary WorldJane M100% (1)
- Purposive Communication Preliminary DiscussionDocument2 pagesPurposive Communication Preliminary DiscussionJohn Mark100% (1)
- (QII-L2) Decorate and Present Pastry ProductsDocument30 pages(QII-L2) Decorate and Present Pastry ProductsLD 07100% (1)
- PPT-QC AcDocument34 pagesPPT-QC AcAmlan Chakrabarti Calcutta UniversityPas encore d'évaluation
- Mini Project A-9-1Document12 pagesMini Project A-9-1santhoshrao19Pas encore d'évaluation
- WellaPlex Technical 2017Document2 pagesWellaPlex Technical 2017Rinita BhattacharyaPas encore d'évaluation
- Bugatti Type 57SCDocument10 pagesBugatti Type 57SCjorge Angel Lope100% (1)
- Fall 3050 SyllabusDocument6 pagesFall 3050 Syllabustaher91Pas encore d'évaluation
- Vtoris 100% Clean Paypal Transfer Guide 2015Document8 pagesVtoris 100% Clean Paypal Transfer Guide 2015Sean FrohmanPas encore d'évaluation
- Review and Basic Principles of PreservationDocument43 pagesReview and Basic Principles of PreservationKarl Marlou Bantaculo100% (1)
- Salwico CS4000 Fire Detection System: Consilium Marine ABDocument38 pagesSalwico CS4000 Fire Detection System: Consilium Marine ABJexean SañoPas encore d'évaluation
- Service Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesDocument3 pagesService Letter Service Letter Service Letter Service Letter: Commercial Aviation ServicesSamarPas encore d'évaluation
- DILG Opinion-Sanggunian Employees Disbursements, Sign Checks & Travel OrderDocument2 pagesDILG Opinion-Sanggunian Employees Disbursements, Sign Checks & Travel OrderCrizalde de DiosPas encore d'évaluation
- Training Course For 2 Class Boiler Proficiency Certificate (Gujarat Ibr)Document3 pagesTraining Course For 2 Class Boiler Proficiency Certificate (Gujarat Ibr)JAY PARIKHPas encore d'évaluation
- Schermer 1984Document25 pagesSchermer 1984Pedro VeraPas encore d'évaluation
- 377 Situational Expression Advanced Level Test Quiz Online Exercise With Answers 1Document7 pages377 Situational Expression Advanced Level Test Quiz Online Exercise With Answers 1zdravkamajkicPas encore d'évaluation
- Landcorp FLCC Brochure 2013 v3Document6 pagesLandcorp FLCC Brochure 2013 v3Shadi GarmaPas encore d'évaluation
- Synchronous Machines-1Document41 pagesSynchronous Machines-1Rouxcel abutoPas encore d'évaluation
- WeldingDocument23 pagesWeldingMathan EverPas encore d'évaluation
- Measuring and Modeling Vertical Crosshead Vibration in Api-618 Reciprocating CompressorsDocument18 pagesMeasuring and Modeling Vertical Crosshead Vibration in Api-618 Reciprocating CompressorshmshawkiPas encore d'évaluation
- Activity Based Costing TestbanksDocument18 pagesActivity Based Costing TestbanksCharlene MinaPas encore d'évaluation
- دور أخلاقيات الأعمال في تحسين أداء المنظماتDocument14 pagesدور أخلاقيات الأعمال في تحسين أداء المنظماتChaima LaifaPas encore d'évaluation
- Math ExamDocument21 pagesMath ExamedgemarkPas encore d'évaluation
- Xii Mathematics CH 01 Question BankDocument10 pagesXii Mathematics CH 01 Question BankBUNNY GOUDPas encore d'évaluation
- ProjectDocument22 pagesProjectSayan MondalPas encore d'évaluation