Vous aimerez peut-être aussi
- UNCITRAL Guide United Nations Commission On International Trade LawDocument56 pagesUNCITRAL Guide United Nations Commission On International Trade Lawsabiont100% (2)
- BackgroundsDocument13 pagesBackgroundsRaMinah100% (8)
- Speed, Velocity & Acceleration (Physics Report)Document66 pagesSpeed, Velocity & Acceleration (Physics Report)Kristian Dave DivaPas encore d'évaluation
- Point-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsDocument9 pagesPoint-to-Point Trajectory Generation Under Joint Constraints For Industrial RobotsInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Dynamic Modeling and Control of SegwayDocument35 pagesDynamic Modeling and Control of SegwayMohamed Amine ZehryPas encore d'évaluation
- RoboticsDocument18 pagesRoboticslakshmigsr6610100% (1)
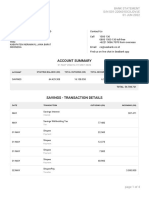
- Seabank Statement 20220726Document4 pagesSeabank Statement 20220726Alesa WahabappPas encore d'évaluation
- Module 1 Lesson 2Document31 pagesModule 1 Lesson 2Angela Rose BanastasPas encore d'évaluation
- International Journal of Engineering Science: Farooq M, Dao Bo WangDocument13 pagesInternational Journal of Engineering Science: Farooq M, Dao Bo Wangphyco1954Pas encore d'évaluation
- Mechanical Systems and Signal Processing: Zhi-Cheng QiuDocument19 pagesMechanical Systems and Signal Processing: Zhi-Cheng QiuLakshmi Ganesh SudikondaPas encore d'évaluation
- REVIEWD RESEARCH - pdf1Document13 pagesREVIEWD RESEARCH - pdf1Mengistu TarkoPas encore d'évaluation
- Asi 03 00024 v2 PDFDocument19 pagesAsi 03 00024 v2 PDFccPas encore d'évaluation
- An Acceleration-Based State Observer For Robot Manipulators With Elastic JointsDocument7 pagesAn Acceleration-Based State Observer For Robot Manipulators With Elastic JointsJyotirekha PatiPas encore d'évaluation
- Robotic ManipulatorsDocument4 pagesRobotic Manipulatorsshaik roshanPas encore d'évaluation
- Project Segway 3 WheelDocument26 pagesProject Segway 3 WheelMohit ChetwaniPas encore d'évaluation
- Kinematic Design of Manipulators: Larm: Laboratory of Robotics and Mechatronics, Dimsat - University of Cassino ItalyDocument26 pagesKinematic Design of Manipulators: Larm: Laboratory of Robotics and Mechatronics, Dimsat - University of Cassino ItalyJuan Pablo BenítezPas encore d'évaluation
- BMED423 - Final Project - Endoscopic Robotic SolutionsDocument24 pagesBMED423 - Final Project - Endoscopic Robotic SolutionsRazan Al AzzamPas encore d'évaluation
- Robust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Document7 pagesRobust Adaptive Control For Mobile Manipulators: International Journal of Automation and Computing February 2011Chandrasekar ElankannanPas encore d'évaluation
- Submission FlickingerDocument6 pagesSubmission FlickingerFauzan AnshariPas encore d'évaluation
- 1 s2.0 S0094114X2200163X MainDocument31 pages1 s2.0 S0094114X2200163X Mainkurts010Pas encore d'évaluation
- 1.1. A Sense of HistoryDocument8 pages1.1. A Sense of HistoryCarlitos FerPas encore d'évaluation
- Actuators: Control of A Heavy-Lift Robotic Manipulator With Pneumatic Artificial MusclesDocument25 pagesActuators: Control of A Heavy-Lift Robotic Manipulator With Pneumatic Artificial MusclesLovely SinghPas encore d'évaluation
- A Review On Various Methods For Self Balancing PDFDocument6 pagesA Review On Various Methods For Self Balancing PDFiron manPas encore d'évaluation
- Hybrid Learning Control Schemes With Input Shaping of A Exible Manipulator SystemDocument11 pagesHybrid Learning Control Schemes With Input Shaping of A Exible Manipulator Systemk_vinothkumar75Pas encore d'évaluation
- Seminar ReportDocument19 pagesSeminar ReportdfkoejfiPas encore d'évaluation
- Video 8Document16 pagesVideo 8Neural NetPas encore d'évaluation
- Hybrid Actuator For Robot ManipulatorsDocument7 pagesHybrid Actuator For Robot Manipulatorsgurivi201Pas encore d'évaluation
- Advanced Controls MidDocument7 pagesAdvanced Controls Midbot10Pas encore d'évaluation
- Design and Implementation of An Autonomous Robotic ArmDocument11 pagesDesign and Implementation of An Autonomous Robotic ArmInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- An Effective Approach To Enhance The Balancing Control in Bycycorobot Using The Soft Computing TechniquesDocument19 pagesAn Effective Approach To Enhance The Balancing Control in Bycycorobot Using The Soft Computing TechniquesIAES International Journal of Robotics and AutomationPas encore d'évaluation
- Machines: A Review of End-Effector Research Based On Compliance ControlDocument19 pagesMachines: A Review of End-Effector Research Based On Compliance Controlcekigad371Pas encore d'évaluation
- Vector ControlDocument10 pagesVector ControlLove Shrimali0% (1)
- Disturbance-Rejection High-Precision Motion Control of A Stewart PlatformDocument11 pagesDisturbance-Rejection High-Precision Motion Control of A Stewart PlatformMax ZemaPas encore d'évaluation
- Markovian-Based Fault-Tolerant Control For Wheeled Mobile ManipulatorsDocument11 pagesMarkovian-Based Fault-Tolerant Control For Wheeled Mobile Manipulatorshub23Pas encore d'évaluation
- Robot Manipulator Guidance ControlDocument19 pagesRobot Manipulator Guidance ControlWilliam VenegasPas encore d'évaluation
- Self Balancing Two-Wheel LocomotiveDocument55 pagesSelf Balancing Two-Wheel LocomotiveSujay PawarPas encore d'évaluation
- Tracking Control 3 Omni Wheel ModelDocument15 pagesTracking Control 3 Omni Wheel ModelRangga NaufalPas encore d'évaluation
- Neural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsDocument9 pagesNeural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsKuldeep KumarPas encore d'évaluation
- Robust Adaptive Sliding Mode Admittance Control ofDocument41 pagesRobust Adaptive Sliding Mode Admittance Control ofJubei YanaikiPas encore d'évaluation
- Cai 4th PDFDocument3 pagesCai 4th PDFJoao CarvalhoPas encore d'évaluation
- Yoke MechanismDocument25 pagesYoke MechanismNethaji Tr100% (1)
- AMC2010 PlenaryDocument15 pagesAMC2010 PlenaryWill BlackPas encore d'évaluation
- Robot Manipulator Control and Computational Cost: Technical Reports (CIS)Document40 pagesRobot Manipulator Control and Computational Cost: Technical Reports (CIS)Mauricio RamosPas encore d'évaluation
- Self Balancing Robot PDFDocument12 pagesSelf Balancing Robot PDFVickey VigneshPas encore d'évaluation
- Advanced 6-Dof Mobile Manipulator For Assembly TasksDocument6 pagesAdvanced 6-Dof Mobile Manipulator For Assembly TasksInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Zainaib JasssimDocument9 pagesZainaib JasssimAs AdPas encore d'évaluation
- Performance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotDocument6 pagesPerformance Comparison Between Fuzzy Logic Controller (FLC) and PID Controller For A Highly Nonlinear Two-Wheels Balancing RobotVignesh RamakrishnanPas encore d'évaluation
- Command Shaping Techniques For Vibration Control of A Exible Robot ManipulatorDocument22 pagesCommand Shaping Techniques For Vibration Control of A Exible Robot ManipulatorsaeedPas encore d'évaluation
- Ra Tip Over StabilityDocument7 pagesRa Tip Over StabilityNithil PasunuriPas encore d'évaluation
- A New Variable Structure PID-Controller Design For Robot ManipulatorsDocument9 pagesA New Variable Structure PID-Controller Design For Robot ManipulatorsMehdi DalirPas encore d'évaluation
- Gan 2019Document23 pagesGan 2019MarinelPas encore d'évaluation
- Model-Assisted Extended State Observer-Based CompuDocument12 pagesModel-Assisted Extended State Observer-Based CompumezianePas encore d'évaluation
- Slotine Li Tac 88Document9 pagesSlotine Li Tac 88Linh Chi NguyenPas encore d'évaluation
- RoboticsDocument32 pagesRoboticsNimmagaddadeepakPas encore d'évaluation
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanPas encore d'évaluation
- Segway TrajectoryDocument6 pagesSegway Trajectory4nt0n3g0Pas encore d'évaluation
- Commande San Modele Robot A 2dllDocument18 pagesCommande San Modele Robot A 2dllElleuch DorsafPas encore d'évaluation
- Modi Ed Power Rate Sliding Mode Control For Robot Manipulator Based On Particle Swarm OptimizationDocument13 pagesModi Ed Power Rate Sliding Mode Control For Robot Manipulator Based On Particle Swarm OptimizationIAES International Journal of Robotics and AutomationPas encore d'évaluation
- Stability Control of Minimalist Bipedal Robot in SDocument8 pagesStability Control of Minimalist Bipedal Robot in SMARCELO HINOJOSA HERNANDEZPas encore d'évaluation
- Adaptive Neural Impedance Control of A Robotic Manipulator With Input SaturationDocument11 pagesAdaptive Neural Impedance Control of A Robotic Manipulator With Input SaturationAgil AgilPas encore d'évaluation
- Balancing Control of A Two Wheeled Mobile Robot SystemDocument7 pagesBalancing Control of A Two Wheeled Mobile Robot SystemAbdellilah HattabPas encore d'évaluation
- Robots in Human EnvironmentsDocument15 pagesRobots in Human EnvironmentsAsasd AsdasdPas encore d'évaluation
- Integrated Task Planning and Control For Mobile ManipulatorsDocument18 pagesIntegrated Task Planning and Control For Mobile ManipulatorsmanikandanmfgPas encore d'évaluation
- Control Passive Mobile Robots For Object Transportation - Braking Torque Analysis and Motion ControlDocument7 pagesControl Passive Mobile Robots For Object Transportation - Braking Torque Analysis and Motion ControlLuis Slender Corimanya (NikeTiM)Pas encore d'évaluation
- Flexible Manipulators: Modeling, Analysis and Optimum DesignD'EverandFlexible Manipulators: Modeling, Analysis and Optimum DesignPas encore d'évaluation
- Mosharaf HossainDocument2 pagesMosharaf HossainRuhul RajPas encore d'évaluation
- QP 12math Term 1Document11 pagesQP 12math Term 1sarthakPas encore d'évaluation
- Individual Career Plan: DIRECTIONS: Answer The Following Questions in Paragraph Form (3-4 Sentences) Per QuestionDocument2 pagesIndividual Career Plan: DIRECTIONS: Answer The Following Questions in Paragraph Form (3-4 Sentences) Per Questionapi-526813290Pas encore d'évaluation
- Water Pump 250 Hrs Service No Unit: Date: HM: ShiftDocument8 pagesWater Pump 250 Hrs Service No Unit: Date: HM: ShiftTLK ChannelPas encore d'évaluation
- Regional Manager Business Development in Atlanta GA Resume Jay GriffithDocument2 pagesRegional Manager Business Development in Atlanta GA Resume Jay GriffithJayGriffithPas encore d'évaluation
- Network Fundamentas ITEC90Document5 pagesNetwork Fundamentas ITEC90Psychopomp PomppompPas encore d'évaluation
- Modern and Nonlinear OpticsDocument181 pagesModern and Nonlinear Opticssoma_venuPas encore d'évaluation
- Chemistry Investigatory Project (R)Document23 pagesChemistry Investigatory Project (R)BhagyashreePas encore d'évaluation
- Moquerio - Defense Mechanism ActivityDocument3 pagesMoquerio - Defense Mechanism ActivityRoxan MoquerioPas encore d'évaluation
- Computer Class 3 ThirdDocument1 pageComputer Class 3 ThirdbeakraamPas encore d'évaluation
- Gaming Ports MikrotikDocument6 pagesGaming Ports MikrotikRay OhmsPas encore d'évaluation
- Iaea Tecdoc 1092Document287 pagesIaea Tecdoc 1092Andres AracenaPas encore d'évaluation
- Agency Canvas Ing PresentationDocument27 pagesAgency Canvas Ing Presentationkhushi jaiswalPas encore d'évaluation
- Introduction To Atomistic Simulation Through Density Functional TheoryDocument21 pagesIntroduction To Atomistic Simulation Through Density Functional TheoryTarang AgrawalPas encore d'évaluation
- C4 Vectors - Vector Lines PDFDocument33 pagesC4 Vectors - Vector Lines PDFMohsin NaveedPas encore d'évaluation
- FpsecrashlogDocument19 pagesFpsecrashlogtim lokPas encore d'évaluation
- The Wayland News October 2014Document16 pagesThe Wayland News October 2014Julian HornPas encore d'évaluation
- Pipe Cleaner Lesson PlanDocument2 pagesPipe Cleaner Lesson PlanTaylor FranklinPas encore d'évaluation
- Decision Trees For Management of An Avulsed Permanent ToothDocument2 pagesDecision Trees For Management of An Avulsed Permanent ToothAbhi ThakkarPas encore d'évaluation
- Cetie Guide No1 EngDocument55 pagesCetie Guide No1 EngJose Manuel Sepulveda RomanPas encore d'évaluation
- Soil NailingDocument6 pagesSoil Nailingvinodreddy146Pas encore d'évaluation
- Hazardous Locations: C.E.C. ClassificationsDocument4 pagesHazardous Locations: C.E.C. ClassificationsThananuwat SuksaroPas encore d'évaluation
- Virtual Assets Act, 2022Document18 pagesVirtual Assets Act, 2022Rapulu UdohPas encore d'évaluation
- 1B20 40Document4 pages1B20 40Electrival TcatallerPas encore d'évaluation
- Morfologi Dan Citra Kota Kawasan Kauman, Kecamatan Juwana, Kabupaten Pati The Morphology and Image of Kauman Town, Juwana Sub District, Pati RegencyDocument16 pagesMorfologi Dan Citra Kota Kawasan Kauman, Kecamatan Juwana, Kabupaten Pati The Morphology and Image of Kauman Town, Juwana Sub District, Pati RegencyRABIAH ARDIANTI TUM TOMAGOLAPas encore d'évaluation