Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- GS-2018 (Mathematics) : Tata Institute of Fundamental ResearchDocument8 pagesGS-2018 (Mathematics) : Tata Institute of Fundamental ResearchRKPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Finite Abelian GroupsDocument6 pagesFinite Abelian GroupsdancavallaroPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Differentiation RulesDocument22 pagesDifferentiation RulesDANIEL SERRONAPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Convergence Tests & ExamplesDocument4 pagesConvergence Tests & ExamplesNTPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- HW 15 SolnDocument2 pagesHW 15 SolnPhương LêPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- John Willard Milnor - Topology From The Differentiable ViewpointDocument76 pagesJohn Willard Milnor - Topology From The Differentiable Viewpointandhrimnir100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- A Geometric Series Is The Sum of The Terms of A Geometric Sequence. A R NDocument5 pagesA Geometric Series Is The Sum of The Terms of A Geometric Sequence. A R NReygie FabrigaPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- IsomorphismDocument5 pagesIsomorphismHabtu Reda BerhePas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- Alexander Ritter - Geometry of SurfacesDocument103 pagesAlexander Ritter - Geometry of Surfacesdelenda3Pas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- Torsion TensorDocument7 pagesTorsion Tensorletter_ashish4444Pas encore d'évaluation
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Gy 9 Xa 8 Vyt 5 XE81 X 3Document15 pagesGy 9 Xa 8 Vyt 5 XE81 X 3sheilaguesmi1Pas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Homework # 6: Name: MAT201A University of California, Davis Fall 2017Document2 pagesHomework # 6: Name: MAT201A University of California, Davis Fall 2017ant314159265Pas encore d'évaluation
- Logical ReasononingDocument8 pagesLogical ReasononingSamPas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- General Linear GroupDocument6 pagesGeneral Linear GroupmaykPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- LE in Combinatorics (Alimento) (Final)Document23 pagesLE in Combinatorics (Alimento) (Final)KayePas encore d'évaluation
- Top BookDocument677 pagesTop BookPablo PitrelliPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Maths M AssignmentDocument8 pagesMaths M AssignmentXue TingPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1091)
- Mte 9Document8 pagesMte 9Chowdhury SujayPas encore d'évaluation
- Maths 1Document61 pagesMaths 1Patricia JosephPas encore d'évaluation
- Filters and Ultrafilters in Real AnalysisDocument31 pagesFilters and Ultrafilters in Real AnalysislerhlerhPas encore d'évaluation
- Tially Pseudocompact: Na NaDocument21 pagesTially Pseudocompact: Na NaBart MaxPas encore d'évaluation
- MA1010 Note001 PDFDocument30 pagesMA1010 Note001 PDFDAVIDPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Payman L Kassaei: P P P 0 PDocument8 pagesPayman L Kassaei: P P P 0 P진석호Pas encore d'évaluation
- Complex Val ArrayDocument11 pagesComplex Val ArraysolderofPas encore d'évaluation
- Notas Utiles HomotopiaDocument21 pagesNotas Utiles HomotopiaHoracioCastellanosMuñoaPas encore d'évaluation
- Holography and Local Fields: Ingmar SaberiDocument26 pagesHolography and Local Fields: Ingmar SaberiJack Ignacio NahmíasPas encore d'évaluation
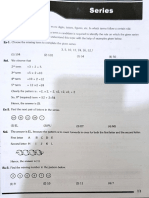
- Sequences and SeriesDocument62 pagesSequences and SeriesNicola Leonardo VilardoPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Numerical Sequences. Limit of A Sequence. Properties of Convergent Sequences. Limit of Monotone Sequence. NumberDocument3 pagesNumerical Sequences. Limit of A Sequence. Properties of Convergent Sequences. Limit of Monotone Sequence. NumberFuad SuleymanovPas encore d'évaluation
- Tangent PlanesDocument16 pagesTangent PlanesFerdinand Sebastian Barnabas100% (1)
- Solution 8Document3 pagesSolution 8Nahuel DiazPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)