Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Hands-On Activity Fruit Basket: ObjectiveDocument2 pagesHands-On Activity Fruit Basket: ObjectiveDARAPas encore d'évaluation
- PEM Executive SummaryDocument11 pagesPEM Executive SummaryJvr SubramaniaraajaaPas encore d'évaluation
- Pass Task 3.1: Drawing Program - Drawing: Swinburne University of TechnologyDocument9 pagesPass Task 3.1: Drawing Program - Drawing: Swinburne University of TechnologyHiếu PhanPas encore d'évaluation
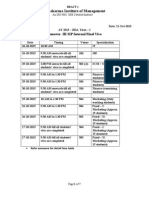
- MBA SEM-III Internal Viva Time Table 2015-16 PDFDocument7 pagesMBA SEM-III Internal Viva Time Table 2015-16 PDFSaurabh DhanorkarPas encore d'évaluation
- Resume Instrument DileepDocument3 pagesResume Instrument Dileepdileepgupta1233196Pas encore d'évaluation
- Red Hat Enterprise Linux-5-SystemTap Beginners Guide-En-USDocument76 pagesRed Hat Enterprise Linux-5-SystemTap Beginners Guide-En-USBuland Kumar SinghPas encore d'évaluation
- Product Guide: Clipsal C-BusDocument76 pagesProduct Guide: Clipsal C-BusGokul KrishnanPas encore d'évaluation
- Lesson 1Document31 pagesLesson 1Alice Jane RAMA LagsaPas encore d'évaluation
- V058-E1-1 NT4S+NT15S+NT18S Multi VendorDocument164 pagesV058-E1-1 NT4S+NT15S+NT18S Multi Vendorstavroula zarkadoulaPas encore d'évaluation
- Oracle SQL Metadata or System TablesDocument2 pagesOracle SQL Metadata or System TablesVenkatesh VenkatPas encore d'évaluation
- D2 - Boat ReservationDocument3 pagesD2 - Boat ReservationJovit FondevillaPas encore d'évaluation
- MNO 4G LTE Security PerspectivesDocument9 pagesMNO 4G LTE Security PerspectivesTzvika ShechoriPas encore d'évaluation
- 70-703 V14.35Document109 pages70-703 V14.35Frederique GuillonPas encore d'évaluation
- Inter Company InvoicingDocument41 pagesInter Company InvoicingShanti BollinaPas encore d'évaluation
- Openfoam: User GuideDocument237 pagesOpenfoam: User GuideHugo Lenin SanchezPas encore d'évaluation
- Sthira Solns PVT LTD, BangaloreDocument25 pagesSthira Solns PVT LTD, Bangaloreshanmathieswaran07Pas encore d'évaluation
- Color IT Project Management AnalysisDocument36 pagesColor IT Project Management AnalysisGeorge EduardPas encore d'évaluation
- VCarve Post Processor GuideDocument37 pagesVCarve Post Processor GuidefertobyPas encore d'évaluation
- Color Grid Design in PhotoshopDocument30 pagesColor Grid Design in PhotoshopElit igaPas encore d'évaluation
- Gadget Comparison - Mi 1c - 02 - Ahmad Ridlo Suhardi#14 - Gita Kartika Pariwara#21 - Putri Dian IstianaDocument8 pagesGadget Comparison - Mi 1c - 02 - Ahmad Ridlo Suhardi#14 - Gita Kartika Pariwara#21 - Putri Dian IstianaGita Kartika PariwaraPas encore d'évaluation
- Fire Alarm: HarringtonDocument4 pagesFire Alarm: HarringtonNacho Vega SanchezPas encore d'évaluation
- Food PowerP2Document9 pagesFood PowerP2Winda FePas encore d'évaluation
- What Is Hadoop - Introduction, Architecture, Ecosystem, ComponentsDocument8 pagesWhat Is Hadoop - Introduction, Architecture, Ecosystem, ComponentsAhmed MohamedPas encore d'évaluation
- Lecture 1 at A Glance: Lecture No 2: Writing Basic SQL SELECT StatementsDocument41 pagesLecture 1 at A Glance: Lecture No 2: Writing Basic SQL SELECT Statementslovely personPas encore d'évaluation
- Credit Card Fraud Detection Using Hidden Markov Model Scope of The ProjectDocument28 pagesCredit Card Fraud Detection Using Hidden Markov Model Scope of The Projectعرفان لطیفPas encore d'évaluation
- Class XII Computer Science Sample Paper 1 SolvedDocument10 pagesClass XII Computer Science Sample Paper 1 SolvedVijayaBabuPas encore d'évaluation
- HiTutor Emergency Contact GuideDocument3 pagesHiTutor Emergency Contact GuideEdén Verde Educación Con SaludPas encore d'évaluation
- Robotics and Computer Integrated Manufacturing: Full Length ArticleDocument12 pagesRobotics and Computer Integrated Manufacturing: Full Length ArticleAHMED SALEMPas encore d'évaluation
- Pengaruh Shift Kerja Terhadap Kinerja Karyawan Dengan Motivasi Sebagai Variabel Intervening (Studi Kasus Pada Ruang UGD Rumah Sakit Di Kota Madiun)Document23 pagesPengaruh Shift Kerja Terhadap Kinerja Karyawan Dengan Motivasi Sebagai Variabel Intervening (Studi Kasus Pada Ruang UGD Rumah Sakit Di Kota Madiun)iwang saudjiPas encore d'évaluation
- WebGIS-Coastal Database Management SystemDocument7 pagesWebGIS-Coastal Database Management SystemChinna RamaniPas encore d'évaluation