Académique Documents
Professionnel Documents
Culture Documents
Ecuaciones Diferenciales en Derivadas Parciales - Henry Lamos
Transféré par
Alexander Angarita IguaranCopyright
Formats disponibles
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
Formats disponibles
Ecuaciones Diferenciales en Derivadas Parciales - Henry Lamos
Transféré par
Alexander Angarita IguaranDroits d'auteur :
Formats disponibles
Ecuaciones Diferenciales en Derivadas Parciales
Lamos Diaz Henry
(H.Lamos) UIS,
E-mail address: hlamos@uis.edu.co
URL: http://www.lamos.uis
Dedicado a la memoria de mis hijos y Yaneth.
2000 Mathematics Subject Classication. Primary 05C38, 15A15; Secondary
05A15, 15A18
El autor expresa su agradecimiento a la UIS.
Resumen. Replace this text with your own abstract.
ndice general
Captulo 1. Introduccin 1
Captulo 2. Modelacin matemtica 3
1. Modelos 6
Captulo 3. Ecuaciones Diferenciales en derivadas parciales 41
1. Introduccin 41
2. Problema de busquedade valores y vectores propios 65
3. Mtodo de Fourier 77
4. Ecuaciones diferenciales parablicas 98
5. Ecuaciones de tipo eliptco 108
Captulo 4. Solucin de problemas por diferencias nitas 117
1. Introduccin 117
iii
iv NDICE GENERAL
Operadores en diferencias137
2. 141
Captulo 5. Transformada de Laplace 143
NDICE GENERAL v
Elementos nitos151
Captulo 7. Teora de los Problemas Inversos y Mal Puestos 165
Captulo A. El primer Anexo 203
CHAPTER 1
Introduccin
En el proceso de la modelacin matemtica, lo que se hace normalmente es
construir una descripcin de un fenmeno de la vida real en trminos matemticos,
es decir crear un segundo mundo en que se considera la situacin.
El proceso de construccin de un modelo matemtico requiere habilidad, imag-
inacin y evaluacin objetiva. En la formulacin del problema se requiere una com-
prensin del rea del problema, lo mismo que de las matemticas correspondientes.
A travs de la seccin se recalca la necesidad de que el Investigador en el proceso
de la modelacin matemtica tenga en cuenta las siguientes cuestiones.
El conjunto de hiptesis (razonables) que usar en la descripcin de su real-
idad.
La construccin correcta de las dimensiones fsicas de las variables
La consistencia del modelo en el sentido de que las ecuaciones no se contradigan
entre s
La obtencin de soluciones de las ecuaciones pertinentes
La dicultad en la obtencin de las soluciones
La evaluacin de las soluciones del MM como una respuesta al problema en
estudio.
Se debe en cada etapa de validacin del modelo irlo renando, lo cual constituye
una prueba de que el modelo se puede utilizar para predecir resultados. Es de anotar
nuevamente que un modelo no es la descripcin total de una realidad, sino slo una
representacin (idealizacin) de ella. Modelos ms renados pueden proporcionar
una mejor comprensin de los procesos de la naturaleza, pero podria traer como
consecuencia una dicultad mayor para su solucin bien sea anlitica o numrica.
El primer captulo trata sobre Modelos Matemticos en Ingeniera (MMI). Se
construyen varios modelos para describir situaciones del mundo ingenieril. En la
1
2 1. INTRODUCCIN
mayora de los modelos que se construyen se usan un enfoque sco-matemtico
que nos conducen a Ecuaciones Diferenciales de parmetros concentrados (EDO-
Ecuaciones Diferenciales Ordinarias) y de parmetros distribuidos (EDP- Ecua-
ciones Diferenciales Parciales).
En el segundo captulo captulo se analizan una serie de Problemas Inversos;
como, el Problema de Identicacin de coecientes, el problema de encontrar una
fuente. Se estudian los mtodos de regularizacin para PMP y se resuelven varios
problemas mediante el mtodo de Tikhonov en forma nmerica.
CHAPTER 2
Modelacin matemtica
Objetivo del captulo. El proposito de esta seccin es un acercamiento al uso
de Modelos Matemticos (MM) en la ingeniera. La modelizacin matemtica es util
para el Ingeniero ya que le permite conocer, entender e interpretar EL MUNDO
FSICO en el proceso de toma de decisiones.
PROBLEMAS. Los problemas del mundo usualmente se resuelven, aun si
la solucin consiste en ignorar el problema y esperar a que desaparezca tal como
apareci (No problem is so big or so complicated that it cant never be run away
from - Charlie Brown. ) algunas veces se pueden resolver los problemas ptima-
mente; sin embargo, limitaciones de tiempo, talento, conocimiento, o recursos nos
inclinan a encontrar soluciones que no son las mejores pero s un poco superiores a
las de la actualidad.
El primer paso en la solucin de un problema es denir el sistema que se in-
tenta modelar. En mecnica bsica, se lleva a cabo un uso extensivo del diagrama
de cuerpo libre; en termodinmica se consideran sistemas cerrados o abiertos, en
mecnica de uidos sistemas y volumen de control.
PERO QUE ES UN SISTEMAS?
Concepto de sistema. Por sistema real lo entenderemos como una fuente de
datos de comportamiento de alguna parte del mundo real por la que mostramos
inters. Esa parte de la realidad estar formada por un conjunto de elementos o
componentes o entidades que interaccionan para alcanzar un objetivo comn. Los
sistemas pueden ser naturales o articiales, actuales o planicados para un fu-
turo. Por ejemplo, una Universidad puede considerarse como un sistema articial
que realmente existe, con profesores, secretarias, estudiantes, empleados admin-
istrativos, aulas, computadores, impresoras,... como componentes. Los elementos
poseen ciertas caractersticas o atributos, parmetros y variables, que toman val-
ores numricos o lgicos y, al conjunto, se denominan variables descriptivas del
sistema. En nuestro ejemplo, los atributos pueden ser el nmero de profesores, los
tipos de secretarias. Se dan una serie de relaciones o actividades entre los elementos
y, en consecuencia, los elementos interaccionan produciendo cambios en el sistema.
Por ejemplo, en la Universidad se tienen estudiantes que necesitan un servicio (se
3
4 2. MODELACIN MATEMTICA
les debe ensear algo) que son manejados por los profesores, por las secretarias, etc.
Si no hubiera profesores, no habra atencin a los estudiantes.
Consideramos relaciones internas y externas al sistema. Las primeras conectan
los elementos dentro del sistema; las segundas conectan los elementos con el mundo
exterior. Por ejemplo, una relacin interna es la interaccin entre estudiantes y
computadores, o entre secretarias y decano. Una relacin externa es la llegada de
personas (clientes) a la Universidad para solicitar asesorias. Las interrelaciones entre
entidades y entre entidades y el sistema, se expresan a travs de parmetros y de
variables. Cualquier proceso que cambie los atributos de una entidad se denomina
actividad, como, por ejemplo, la llegada o salida de usuarios de la Universidad.
DESCRIPCIN DE UN SISTEMA. Al hablar del sistema es conveniente
tener en cuenta los puntos siguientes:
a. Fijar los objetivos.
b. Encontrar medidas de funcionamiento, desempeo o efectividad del sistema.
c. Observar cules son los recursos o entradas del sistema.
d. Determinar cul es el medio ambiente para localizar restricciones, pues al
sistema le es difcil modicar su entorno.
e. Las componentes del sistema y las actividades, el desempeo y las metas
que ellos efectan.
f. La administracin del sistema: es importante identicar la marcha y la
comprobacin de su buen funcionamiento.
Objetivos. Existen gran variedad de objetivos en un problema; sin embargo,
vale la pena recalcar que es ms importante escoger los objetivos apropiados que el
sistema apropiado. En algunos casos, los objetivos no se pueden expresar numri-
camente y en otros casos se pueden tener varios objetivos que entran en conicto.
Entre algunos tipos de objetivos se tienen: Monetarios, Mercadeo, Costo, Calidad,
etc. Al escoger los objetivos es conveniente tener claro los siguientes factores:
Identicar medios y nes
Mirar los trminos de negociacin entre las variables (Calidad vs. Costo)
Que sean preferiblemente cuantcables,
Que sean factibles fsica, econmica y socialmente
El riesgo e incertidumbre que se tiene.
Se deben corregir conictos entre objetivos
Aislar juicios de valor.
CLASIFICACION DE LOS SISTEMAS. Podemos clasicar los sistemas
de muchas formas. Por ejemplo, un sistema puede ser cerrado o abierto. Un sistema
cerrado no se relaciona con el medio que le rodea; uno abierto recibe de su medio
entradas que lo inuyen. Si el sistema tiene la capacidad de reaccionar a cambios en
su propio estado, entonces el sistema tiene retroalimentacin. Adems, los sistemas
pueden ser naturales (una colonia de abejas) o articiales (un automvil); dinmicos
(informacin enviada a travs de una serie de canales) o estticos (una lmpara);
estables (regresan al equilibrio despus de una perturbacin) o inestables; estocs-
ticos (incluyen elementos aleatorios) o determinsticos; adaptativos (responden a
cambios en el medio) o no adaptativos; lineales (todas las relaciones son lineales)
o no lineales. Tambin, pueden tener variables independientes (no manipulables)
o dependientes; no controlables (radiacin) o controlables; continuas, discretas o
mixtas.
2. MODELACIN MATEMTICA 5
Estados de un sistema. Con el estudio de los sistemas se pretende aprender,
disear, cambiar, conservar y, si es posible, controlar su comportamien-
to. Algunas de las variables que intervienen y describen el comportamiento de un
sistema se denominan no observables, ya que no son accesibles para su posible
observacin y medicin. Por el contrario, las variables que pueden medirse se de-
nominan observables y podrn ser de entrada o de salida. Por ejemplo, la destreza,
la perspicacia y el nmero medio de lneas que escribe por minuto una secretaria
son tres variables, las dos primeras no son observables ni medibles directamente
pero la tercera s.
Hemos mencionado, que las componentes de un sistema estn determinadas por
un conjunto de variables descriptivas. Las reglas que especican la interaccin entre
las componentes determinan la forma en que estas variables descriptivas cambian
a lo largo del tiempo. Para que un ordenador sea capaz de simular un modelo debe
conocer estas reglas de interaccin. Tambin puede ser que tenga que guardar los
valores pasados de las variables descriptivas para poder calcular los valores futuros,
ya que las reglas de interaccin son funcin de tales valores. Pero no tienen por qu
almacenarse todos los valores pasados de todas las variables descriptivas, pues en
muchos modelos resulta posible considerar un subconjunto reducido de variables
descriptivas cuyos valores actuales permitan calcular los valores futuros de todas
las variables descriptivas. Tal subconjunto mnimo de variables que describen las
entidades, los atributos y las actividades de un sistema en un instante particular
del tiempo, y que permiten predecir su comportamiento futuro, se denomina de
variables de estado. Los valores de las variables de estado en un instante de tiem-
po t proporcionan el estado del sistema en ese instante. Las variables de estado
relacionan el futuro del sistema con el pasado a travs del presente. El estado del
sistema puede cambiar como resultado de actividades internas o endgenas, o bien
actividades externas o exgenas; por ejemplo el cambio en la tasa del dolar sera
una actividad endgena para alguna empresa importadora de materias primas.
Los atributos de los elementos del sistema denen su estado. Si el compor-
tamiento de los elementos puede predecirse con seguridad, estamos ante un sistema
determinstico. Si no es posible una prediccin exacta, entonces nos enfrentamos
con un sistema estocstico. Las probabilidades de transicin de un sistema de un
estado a otro como respuesta a ciertas actividades caracteriza la naturaleza deter-
minista o aleatoria del sistema. Si la probabilidad de que un sistema que est en
un estado o
l
pase a un estado o
2
es igual a uno (1.0), entonces tenemos un sistema
determinstico. Por ejemplo, al enfriar agua a bajas temperaturas se obtiene hielo,
o del petrleo se obtiene calor y gas. En los sistemas estocsticos, la probabilidad
de que el sistema cambie de un estado o
l
a un estado o
2
,o
3
,..es menor que uno.
Por ejemplo, que el precio del caf (en libras) sea 0.8 centavos de dolares para el
siguiente mes, o que las ventas de un nuevo producto sea mayor a 20 mil unidades
al mes.
Las propiedades estticas y dinmicas describen tambin el estado del sistema.
Un sistema se encuentra en equilibrio, o es estacionario si la probabilidad de encon-
trarse en alguno de los estados no cambia con el tiempo: el sistema puede moverse
de un estado a otro pero las probabilidades de su movimiento entre los estados
permanecen jas. En el caso de un sistema evolutivo o dinmico, las probabilidades
cambian con el tiempo. En trminos matemticos, la caracterizacin de los sistemas
6 2. MODELACIN MATEMTICA
estticos se hace generalmente con ecuaciones algebraicas y la de los dinmicos con
ecuaciones diferenciales o en diferencias.
1. Modelos
La modelacin es el proceso de reconstruccin de un proceso natural de su
medio a una forma llamada modelo, el cual puede analizarse por medio de tcnicas
comprensibles y conables. El trmino modelo puede tener diferentes signicados
para distintas personas y la representacin de un modelo puede ser distinta. Una
clasicacin, de las muchas existentes, considera esencialmente tres clases de mod-
elos.
Clasicaciones de los modelos:
1. Modelos Fsicos.
2. Modelos Mentales.
3. Modelos Simblicos
El decisor debe identicar cul es el tipo de modelo que mejor se adecua al
problema de decisin.
Modelos fsicos: El modelo que adopta la apariencia fsica del objeto que debe
representar se llama modelo fsico. Este tipo de modelo se usa para mostrar o pro-
bar el diseo de elementos, desde nuevas construcciones hasta nuevos productos. En
la industria de la aviacin, se construyen modelos a escala de las nuevas aeronaves
que se prueban en tneles de viento para registrar la aerodinmica del diseo. El
fabricante de repuestos automotrices puede tener un modelo a escala tridimensional
del piso de la planta, completo con mquinas y equipos en miniatura, para poder
analizar un nuevo diseo de la distribucin. Las mquinas en el modelo pueden
reubicarse y estudiarse nuevas distribuciones con el objeto de mejorar el ujo de
materiales. Los modelos fsicos ofrecen la ventaja de que pueden usarse para exper-
imentar. En el ejemplo de la aeronave, los ensayos con un diseo diferente quizs
impliquen construir un modelo completamente nuevo. Adems de la ventaja de la
experimentacin, los modelos fsicos lcidamente describen el problema o sistema
que se est estudiando; resultan tiles para generar alternativas innovadoras de dis-
eo con el objeto de resolver el problema de decisin. No obstante, slo una clase
de problemas relativamente pequea puede resolverse con modelos fsicos. Algunos
ejemplos de problemas que no pueden analizarse con modelos fsicos son la seleccin
de carteras, la seleccin de medios y la planicacin de produccin, la ubicacin de
un negocio, la introduccin de un nuevo producto. Bsicamente, los modelos fsicos
son tiles slo para los problemas de diseo, e incluso en algunos de estos casos se
puede hacer un anlisis ms eciente y completo con Modelos Matemticos que
puedan correrse en computadora.
Adems, estos modelos fsicos no contienen relaciones explcitas entre las al-
ternativas de decisin y las variables y objetivos dependientes, debiendo usarse
mtodos de prueba y error para resolver el problema. Si bien esto, de por s, no
es una terrible desventaja, el proceso de prueba y error, sumado a la necesidad de
reconstruir el modelo con cada cambio de diseo, puede demandar mucho tiempo
y muchos gastos, en algunos casos.
Modelos Mentales/verbales : El modelo verbal es la traduccin del modelo
mental. As, el modelo mental/verbal expresa todas las relaciones funcionales entre
las variables de un proceso. Sin embargo, los modelos mentales/verbales tienen
1. MODELOS 7
una serie de deciencias. El decisor no puede experimentar con ellos, tampoco
indican especcamente cmo cambian los resultados o las medidas de su ecacia
segn la alternativa de decisin de que se trate. Otra desventaja es que no es fcil
mostrar cmo cambian las relaciones segn la alternativa de decisin. No obstante,
los modelos mentales/verbales juegan un papel importante en el proceso de decisin.
Pueden usarse para verbalizar estrategias de decisin logradas con modelos ms
sosticados.
Modelos Simblicos. Son aquellos que incluyen operaciones lgicas o matemti-
cas que pueden utilizarse para formular una solucin de un problema. Se subdividen
en Modelos Matemticos y no matemticos. A su vez, estos ltimos pueden ser:
lingsticos (descripcin verbal), grcos y esquemticos, por ejemplo un grco o
un diagrama de ujo.
Modelos grcos. Los modelos grcos representan un paso til en el proceso
de simbolizacin de un modelo verbal. Algunos modelos grcos son los diagramas
de ujo lgico. El diagrama de ujo lgico es una representacin visual de un pro-
ceso u operacin lgica. Los cuadros del diagrama estn conectados en un patrn
de ujo de secuencia y estn relacionados entre s mediante dos operaciones fun-
damentales. Una de stas es la ramicacin. La ramicacin tiene lugar cuando se
hace una pregunta en cierto paso del proceso y sus posibles respuestas se expresan
como ramicaciones alternativas que se alejan del cuadro. La otra operacin es el
enlace. Este enlace tiene lugar si ciertas respuestas regresan el ujo a una etapa
anterior. Por ejemplo, para describir los esfuerzos de una empresa para determinar
cales competidores reducirn sus precios, podemos utilizar un diagrama de ujo.
La compaa primero considera al competidor i y se pregunta si es probable que
baje su precio. Si la respuesta es si, este resultado se tabula y luego la compaa se
pregunta si hay algn otro competidor al cual tomar en cuenta. Si la respuesta es
no, la rma pasa directamente a la siguiente pregunta. Si hay ms competidores,
el ujo lgico regresa al primer cuadro (es decir, se traza el lazo hacia atrs) ; de
lo contrario, el ujo termina. Los diagramas de ujo lgico se usan frecuentemente
debido a la calidad con que ilustran un proceso lgico.
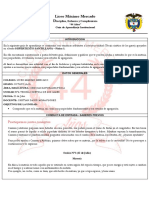
En las guras se muestran algunos diagramas en particular se muestra un di-
agrama de anlisis causal, que se usa para retratar las direcciones de inuencia de
diversas variables sobre las otras. Este diagrama muestra que el precio tiene inuen-
cia directa (negativa) sobre la demanda y una inuencia indirecta tambin a travs
de sus efectos positivos, sobre los gastos en anuncios y calidad percibida. Un precio
elevado conduce a una calidad percibida elevada y lleva a la compaia a gastar ms
en publicidad. Ambas cosas, a su vez, ejercen un efecto positivo en la demanda.
El valor de los diagramas de causalidad es expresar las relaciones complejas que el
Ingeniero de Mercados debe tomar en cuenta y por lo tanto lo hace ver que existen
relaciones ms complejas que no pueden ser expresadas a travs de una ecuacin
entre variables.
Modelos de decisin. Los modelos de decisin tienen como nalidad evaluar
resultados alternativos asociados con diferentes decisiones y encontrar la mejor
decisin. Los modelos de decisin se subclasican en modelos de optimizacin y
heursticos. Un modelo de optimizacin es aqul para el que existen programas de
computacin para encontrar la mejor solucin al problema propuesto. El modelo
heurstico es aqul para el que no existen rutinas de computacin pero que ofrece
otras ventajas. El modelo heurstico puede ser un planteamiento mucho ms exible
8 2. MODELACIN MATEMTICA
Precio
Demanda
Calidad
percibida
Dlares
en anuncios
+
+
-
+
+
Diagrama de anlisis causal
Figura 1. Figura 1
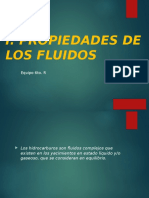
I
II
Calidad
percibida
Precio Demanda
Diagrama de relacin funcional
Figura 2. Figura 2
y complejo. Para usar este modelo, el Ingeniero aplica la heurstica, que se dene
como reglas de dedo que tienden a acortar el tiempo requerido para encontrar
una solucin razonablemente buena. Por ejemplo, en un modelo para determinar
buenas ubicaciones de bodegas, el heurstico podra ser: Considerar ubicaciones
nicamente en grandes ciudades. Esto quizs excluye una ubicacin perfectamente
buena en una ciudad pequea pero los ahorros al tener que vericar mucho menos
ciudades se espera que compensen esta omisin.
Uno de los modelos de decisin que tienen particular pertinencia en algunos
campos de la Ingeniera es el modelo de decisin conocido como programacin
matemtica. La programacin matemtica exige expresar los objetivos de un en-
cargado de decisiones, en forma de cierta funcin matemtica cuyo valor debe
optimizarse. Tambin se introducen varias restricciones en la forma de ecuacin
y/o desigualdades. Una clase de modelos en especial importante es el modelo de
programacin lineal, en el que las funciones matemticas que aparecen tanto en la
funcin objetivo como en las restricciones, son funciones lineales.
QUE ES UN MODELO UN MODELO MATEMATICO?
1. MODELOS 9
El objetivo de muchos experimentos, que se realizan en diferentes ramas de la
ciencia y de la tcnica, consiste en el estudio de las propiedades de los objetos o pro-
cesos que son del inters para el Ingeniero o Investigador, para lograr este propsito
el Ingeniero formula el problema en trminos matemticos; esto es, construye una
descripcin del fenmeno de la vida real en trminos matemticos, crea un segundo
mundo en que considera la situacin.
Un Modelo Matemtico es una herramienta abstracta para representar aprox-
imadamente un proceso real que usa una descripcin matemtica de los factores
esenciales del proceso y sus interrelaciones. Los investiagadores usan los modelos co-
mo dispositivos para la predecin o explicacin del comportamiento del fenmeno,
experimento o sistema.
La eleccin de un modelo determinado depende del propsito del estudio. As,
en un caso general, el primer paso en la formulacin matemtica de un problema es
el diseo de la estructura del modelo, esto es, la descripcin cualitativa del proceso
usando ciertos operadores o ecuaciones. Este procedimiento se llama IDENTIFI-
CACION ESTRUCTURAL.
En forma general diremos que un MM puede ser denido como una formulacin
o una ecuacin que expresa las caractersticas esenciales del fenmeno o procesos
fsico en trminos matemticos, esto es;
\ ar.dcj = )(ar.i:d, jara:, )n:c.dc )ncr.a:)
donde la variable dependiente es una caracterstica que generalmente reeja el com-
portamiento o estado del sistema, las variables independientes son generalmente
dimensiones tales como el tiempo, espacio, precio, cantidades de un producto a
traves de las cuales el comportamiento ser determinado, los parmetros son ree-
jos de las propiedades o la composicin del sistema, y las funciones de fuerzas las
cuales son inuencias externas que actuan sobre el sistema.
La determinacin de los valores adecuados que deben asignarse a los parmetros
del modelo (un valor por parmetro) es crtica y a la vez un reto dentro del proceso
de construccin del modelo. As, el valor asignado a un parmetro muchas veces
es, por necesidad, slo una estimacin. Debido a la incertidumbre sobre el valor
real del parmetro, es importante analizar la forma en que cambiara (si lo hace) la
solucin derivada del problema cuando el valor asignado al parmetro cambia por
otros valores posibles. Este proceso se conoce como anlisis de sensibilidad.
Aun cuando se hable de el modelo matemtico de un problema en la Ingeniera,
los problemas reales por lo general no tienen un solo modelo correcto.
1.1. Metodologa de la modelacin matemtica. La metodologa de
la modelacin se reere a un conjunto de procedimientos sistemticos basados en
conocimientos acumulados cuyo objetivo es abordar y resolver problemas. En reas
de las ciencias e Ingeniera existe una metodologa bien desarrollada que a alcanzado
cierta madurez.
La modelacin es el proceso por el cual se establecen relaciones entre las enti-
dades importantes de un sistema que se expresa en trminos de metas, criterios de
ejecucin y restricciones que en conjunto constituyen el modelo. Cada modelador
tiene un modelo bsico, que constituye la visin o imagen particular que tiene sobre
el sistema y a partir de la cual se construir un modelo simplicado. Mediante la
experimentacin con este modelo simplicado, se espera aumentar la comprensin
del modelo bsico as como del sistema real caracterizado por l.
10 2. MODELACIN MATEMTICA
Un primer paso en la modelacin es establecer el problema de forma clara, lgica
y no ambigua, delimitando sus fronteras. Ya que es casi imposible comprender
y aislar todas las interrelaciones entre los elementos del sistema, se incluye slo
un subconjunto de variables e interrelaciones del sistema original. La habilidad
para seleccionar el subconjunto ms pequeo de variables que describan en
forma adecuada el sistema real es una cualidad notable de un modelador, en el que
tambin desempearn un papel importante su experiencia, intuicin, imaginacin.
As, un rasgo importante para construir un buen modelo ser la simplicidad. Con
frecuencia, no existir correspondencia biunvoca entre las variables del sistema y
del modelo, y muchos detalles se resumirn dependiendo del nivel de abstraccin
del mismo. Los modelos con menor nmero de variables y datos son ms fciles de
construir, de desarrollar, de modicar y de comprender, as como ms fcilmente
tratables, y es muy probable que puedan utilizarse en situaciones prcticas para las
que se han diseado.
Resumiendo podemos armar que en el proceso de construccin de un modelo
matemtico requiere habilidad, imaginacin y evaluacin objetiva. En la formu-
lacin del problema se requiere una comprensin del rea del problema, lo mismo
que de las matemticas correspondientes; as que una posible metodologa en la
construccin de un MM podriamos decir que es la siguiente.
B Formulacin del problema.
B Planteamientos de las hiptesis a usar
B Formulacin matemtica; relacionar las diferentes variables mediante leyes
empricas o naturales
B Solucin o Estimacin del modelo
B Interpretacin de los resultados
B Vericacin de las soluciones como respuesta al problema en estudio.
Es de anotar que en cada etapa de validacin del modelo lo podemos ir re-
nando ya que modelos ms renados pueden proporcionar una mejor comprensin
de los procesos de la naturaleza, sin embargo el renamiento puede traer como
consecuencia una mayor dicultad para la solucin bien sea anlitica o numrica.
El gura 1 se ilustra el uso de modelos para explicar los resultados de una
situacin observable.
Para extensas partes del ambiente natural (el punto 1 de la gura) se da una
expresin matemtica mediante un modelo general en el cual todos los resultados
quedan descritos por algunos principios bsicos. El punto 2 de la gura expresa la
traduccin del mundo real al mundo matemtico por medio de operadores o ecua-
ciones. Luego se resuelve el problema matemtico (a menudo con una simulacin
en la computadora) (punto 3) y el resultado se interpreta en el entorno natural del
problema (punto 4).
El proceso de modelacin es de naturaleza evolutiva, ya que pasa de unas
especulaciones iniciales a hiptesis, a modelos generales y, nalmente, a un modelo
especico simplicado.
EJEMPLOS DE MM. MANZANAS Y NARANJAS. Newton y la Ley
de la Gravitacin Universal
1 =
G' :
d
2
1. MODELOS 11
Problema del
mundo real (1)
Modelo
Matemtico (2)
Solucin. Uso de
tcnicas
analticas,
numricas,
cualitativas (3)
Comprobaci
n (4)
Figura 3. Figura 3
esto es, el tirn gravitatorio de la Tierra se debilita cuanto ms lejos se esta de la
Tierra.
2.
1 = :c
2
son ejemplos familiares.
3. En forma parecida, un modelo matemtico para un problema industrial con-
siste en un conjunto de ecuaciones y expresiones matemticas relacionadas que
describen la esencia del problema. As, si deben tomarse : decisiones cuanti-
cables relacionadas entre s, se representan como variables de decisin (digamos,
r
l
, r
2
, ...r
n
) para las que se deben determinar los valores respectivos. La medida
de desempeo adecuada , que corresponde a la variable dependiente (por ejemplo,
la ganancia) se expresa entonces como una funcin matemtica de estas variables
de decisin (por ejemplo, G = 2r
l
8r
2
..,200r
n
. Tambin se expresan en tr-
minos matemticos todas las limitaciones que se puedan imponer sobre los valores
de las variables de decisin, casi siempre en forma de ecuaciones o desigualdades
(/
I
(r
l
, r
2
, ...r
n
) _ 100). Las constantes (los coecientes o el lado derecho de las
ecuaciones) en las restricciones y en la funcin objetivo es lo que nosotros llamamos
parmetros del modelo. EL PROBLEMA puede expresarse entonces como el prob-
lema de elegir los valores de las variables de decisin de manera que se maximice la
funcin G, sujeta a las restricciones dadas (El modelo matemtico correspondiente
a este problema es la funcin G junto con las restricciones). Un modelo de este
tipo, y algunas variaciones menores sobre l, tipican los modelos analizados en la
programacin matemtica.
12 2. MODELACIN MATEMTICA
5. Un Modelo de proceso de Markov. Este modelo muestra la probabilidad de
pasar del estado actual a cualquier estado futuro. Por ejemplo, consideremos un
buer ubicado en un nodo de una red de comunicacin de datos por donde uyen
paquetes -secuencia de bits organizados en campos bien denidos-. Para simplicar
supongamos que cada segundo (o milisegundo) puede llegar, salir o no un paquete
al nodo. Sea A(:) el nmero de paquetes en el buer en el instante : = 0, 1, 2, .....
. A(:) puede tomar valores enteros desde 0 hasta la capacidad mxima del buer,
nmero mximo de paquetes que caben en el buer. Cuando se alcanza este
valor se satura el buer y no se admiten ms paquetes. Es claro que A(:) es una
variable aleatoria, pues no es posible predecir con absoluta certeza el valor que
tomar en un instante de tiempo determinado, dado que no tenemos control sobre
las posibles rutas seguidas por los paquetes, ni sobre la fuente de los mismos.
Sea (A(0), A(1), ...A(:), ..)adems, asumamos que los paquetes llegan o salen
uno a uno, vale decir, en un instante de tiempo ocurre uno y solo de los siguientes
casos:
o sale un paquete, o entra un paquete o no entran ni salen paquetes del nodo,
la probabilidad de transicin entre los estados que dieran en ms de una unidad
es cero,pues equivaldra a la llegada o salida de ms de un paquete. Con esta
condicin se reduce la complejidad del problema.
La probabilidad de que el sistema se encuentre en el estado , en el instante de
tiempo (:1) dado que en el instante : se encuentra en el estado i, est dada por,
1(A(: 1) = ,)[A(:) = i) =
_
j
I
, , = i, i 1, i 1
0 en otro caso
Las probabilidades se representan por la matriz de transicin 1. Los elementos
de la matriz de transicin son las probabilidades de transicin entre los diferentes
estados i y ,. Asi, las las representan los estado actuales y las columnas el estado
siguiente
0 1 2 8 . .
0 j
oo
j
ol
0 0 0 0 0
1 j
lo
j
ll
j
l2
0 0
2 0 j
2l
j
22
j
23
0
8 .
.
.
0 0 0 0 0 0 j
Al nodo puede llegar un paquete, salir un paquete o no entrar ni salir paquetes.
X
|
, representa el estado del nodo: es decir, el nmero de
paquetes en el nodo.
Denicin: La secuencia de variables aleatorias A(1), A(2).. forma una cadena
de Markov de tiempo discreto si para todo : (: = 1, 2, , .) y todos los posibles valores
de las variables aleatorias tenemos que
(1.1)
1(A(:) = ,)[A(1) = i
l
, A(2) = i
2
, ..A(:1) = i
nl
) = 1(A(:) = ,[A(:1) = i
nl
)
La expresin nos dice que la probabilidad de transicin hacia el estado A(:)
= ,, depende nicamente del estado inmediatamente anterior A(: 1) = i
nl
y
no de los estados previos.
1. MODELOS 13
6. Un modelo descriptivo con pertinencia a muchas situaciones de Ingeniera, es
el modelo de colas. Los modelos de colas se disean para representar situaciones de
turno de espera y responden a dos preguntas especcas: Qu cantidad de tiempo
debe esperar un cliente en un sistema particular? Cmo cambiar este tiempo
de espera como resultado de determinadas alteraciones en las instalaciones? Estas
preguntas pueden ser de particular importancia en sistemas de serivicios (bien sea
un banco, un hipermercado, estaciones de gasolina, una red de comunicaciones).
Donde quiera que los clientes tengan que esperar, existe el peligro de que el tiempo
de espera se torne excesivo, lo que se traduce en prdida de algunos clientes a favor
de los competidores.
La teora de colas se constituye en la principal herramienta para el anlisis de las
redes de telecomunicaciones. El estudio del desempeo de las redes de comunicacin
de datos implica el conocimiento del comporatmiento de las redes ante situaciones
de orden aleatorio, tales como el aumento inesperado del trco de paquetes.
En general, una cola se forma en todo sistema que preste un servicio y en
donde la demanda por el servicio supere la prestacin del mismo en determinados
intervalos de tiempo.La caracterstica ms importante del arribo de elementos al
sistema es la distribucin de probabilidad con que lo hacen. Esta distribucin tiene
un parmetro muy importante, la tasa de arribos. Por ejemplo, en redes de comu-
nicacin de datos es comn utilizar el bit/seg o bps como unidad para medir la
tasa de entrada de elementos al sistema, tambin se usa pauqtes/seg, llamadas/seg,
transacciones/dia
14 2. MODELACIN MATEMTICA
1.2. Ecuaciones Diferenciales. INTRODUCCION
Con frecuencia para la descripcin de un sistema se construyen MM (Modelos
Matemticos) a travs de Ecuaciones Diferenciales Ordinarias (parmetros concen-
trados) o bien a travs de EDDP (Ecuaciones Diferenciales en Derivadas Parciales
de parmetros distribuidos). Las EDDPs aparecen en diversos problemas fsicos y
geomtricos, cuando las funciones que intervienen dependen de dos o ms variables
independientes. Estas variables pueden ser el tiempo y una o ms coordenadas en
el espacio. En este captulo se presentan algunas de las ecuaciones diferenciales par-
ciales ms importantes en las aplicaciones de la ingeniera centrndose el estudio
para las EDDP lineales de segundo orden.
En la construccin de modelos matemticos que conducen a Ecuaciones Difer-
enciales se parte de algn principio fsico conocido (leyes bsicas que gobiernan
la realidad) o hiptesis razonable sobre el sistema (si r denota una magnitud de
inters en el instante t, entonces la tasa de cambio puede calcularse como el caudal
de entrada menos el de salida, ley de equilibrio) razonando luego lgicamente se
obtienen ecuaciones donde aparecen las magnitudes de inters como sus derivadas.
Esta tcnica se basa en un anlisis fsico-matemtico combinado.
LEYES DE CONSERVACION Y RELACIONES AUXILIARES. Al-
gunas de las leyes de conservacin que se usan en la construccin de modelos son
las leyes de conservacin de masa, energa y momentum. El uso de estas leyes es
amplia y se usan tanto en sistemas de Ingeniera qumica, como en mecnica de
uidos, en procesos nucleares, y en muchas otras reas de la ciencias (Ingeniera
Civil, Ingeniera de petrleos).
La aplicacin de estas leyes selecionadas para un proceso en particular lleva
a ecuaciones que son balance de trminos. Por ejemplo, la ecuacin de balance
de calor a partir de la ley de conservacin de la energa; la ecuacin de balance de
masas de una especie. El balance de momentum: la razn de cambio del momentum
es equivalente a las fuerzas que actuan sobre el objeto.
Conservacin de Balance Trminos alternativos
Masa Balance de masas Ecuacin de continuidad
Energa Balance de energa Primera ley de termodinmica
Balance de calor (formas de energa trmicas)
Momentum Balance de Momentum Balance de fuerzas
Ley de Newton
Ecuacin de Navier-Stokes
La primera ley de la termodinmica es una manera de enunciar el principio de
conservacin de la energa: En un intervalo de tiempo ^t la variacin de energa
interna dentro de un sistema es igual al calor tarnsferido hacia el interior del sistema
mas el calor generado dentro del sistema. Por ejemplo, en un sistema cerrado que
consiste de una masa solida ja tien volumen \
_
c:
3
y el slido tiene una densida
j
_
/q,:
3
. Se transere calor al sistema a una velocidad
Q[,o|n|c,:cq[ ; dentro
del slido puede generarse calor, por ejemplo fusin nuclear o por una corriente
elctrica, a la velocidad
Q
u
. Asumamos que los slidos son incompresibles, de modo
que no hay trabajo realizado por el sistema o sobre l. Por lo tanto, segn nuestra
ley tenemos
^l =
Q^t
Q
u
^t
Despus de establecerse los balances bsicos se necesita ahora expresar las
cantidades primarias en trmino de variables de estado (variables secundarias)
1. MODELOS 15
y parmetros.Por ejemplo, un trmino de energa que aparece originalmente como
una entalpa H usualmente se convierte en temperatura T y se especica su calor
especco c.
ALGUNAS RELACIONES AUXILIARES IMPORTANTES
Tasas de tarnsporte
Transporte de masa
Molecular Interface convectiva
.
= 1
dC
.
d.
.
= /
c
(C
+
C)
Ley de Fick
Transporte de Energa
= /
dT
d.
= /^T
Ley de Fourier
Transporte de Momentum
t = j
d
d.
=
1
j
dj
d.
t
u
= )
j
2
2
Ley de viscocidad de Newton Ley de Darcy Tensin de Shear
Una consideracin matemtica imprtante en la construccin de MM es la
denicin de variables dependientes e independientes asociadas con las ecuaciones
de balance. Las variables dependientes como se discutio arriba se reeren como vari-
ables de estado y logicamente tiene formas muy variadas dependiendo del proceso
que se pretende modelar. Las variables independientes usuales son el tiempo, y las
variables espaciales r, j, . o bien se usan coordenas polares, cilindricas o esfericas.
UN MODELO SIMPLE. El proceso de desintegracin de un material ra-
dioactivo se describe a travs de la relacin auxiliar: la velocidad de la desintegracin
de una sustancia es proporcional a la cantidad de la sustancia radioactiva que se
tenga en el instante dado. El coeciente de proporcionalidad c, el cual es caracters-
tico para cada sustancia, es constante y se denomina coeciente de desintegracin.
El modelo matematico para este problema es un problema de Cauchy dado por:
d:
dt
= c:(t) (1.2)
:(t
o
) = ' (1.3)
Si las constantes c y ' son conocidas, entonces, al resolver el problema de
Cauchy sabemos como va cambiando la cantidad de material a travs del tiempo.
Un problema de inters en la ciencia consiste en determinar el coeciente c y
la cantidad inicial de sustancia ' si se sabe que a travs de la experimentacin se
puede denir la cantidad de sustancia :(t) para t [t
l
, t
2
[. De esta manera se debe
determinar el coeciente c y ' si se conoce la funcin :(t) para t [t
l
, t
2
[.
MODELO DE VENTAS. Se desea determinar la relacin funcional entre el
nmero de individuos en una poblacin bajo la inuencia de determinado comercial
publicitario en el instante t; esto es, (t) con el objetivo de predecir futuros valores
de por razones econmicas u otras. Para cumplir con este proposito modelemos
la tasa de cambio de respecto a la variable t. Se pronostica que habr un lmite
de 1 individuos que vern el anuncio.
HIPOTESIS A USAR: Cmo podemos determinar la relacin funcional
entre y t? Una suposicin simple es pensar que la tasa con que crece o decrece
la cantidad de individuos bajo la inuencia del comercial slo depende del nmero
16 2. MODELACIN MATEMTICA
presente de personas que ven el comercial y no de mecanismos dependientes del
tiempo, esto es
0
(t) = )(), donde
0
(t) denota la derivada de (t) respecto al
tiempo. Ahora es necesario modelar la forma de la funcin )(). Como la cantidad
de personas que vern el comercial es 1 entonces de la ecuacin diferencial tenemos
que )(1) = 0; si se toma )(0) = r ; se pueden tener varias funciones que satisfacen
estas condiciones.
La hiptesis ms sencilla es que la funcin )() sea lineal; esto es )() =
c
l
c
2
. O bien se asumira que la funcin )() es un polinomio de grado 2 o
superior. Cul es el polinomio ms adecuado? Generalmente se empieza con un
modelo ms bien sencillo (tomamos a )() como una funcin lineal), si el modelo no
resulta satisfactorio para los nes de prediccin, se puede entonces tomar la funcin
como un polinomio de mayor grado, como por ejemplo, una funcin cuadrtica, para
obtener en este caso la siguiente ecuacin diferencial
d
dt
= (t)
_
r
r
1
(t)
_
= r(t)
_
1
1
1
(t)
_
; (0) =
o
Al resolver la ED (Ecuacin Diferencial) obtenemos el comportamiento del sistema
dinmico que estamos modelando, esto es la dependencia de con respecto al
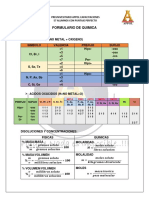
tiempo t. Y al variar los parmetros r, 1,
o
podemos observar la dependencia de
(t). La solucin del problema est dada por la frmula
(1.4) (t) =
r
o
r,1
o
(r r,1
o
)c
:|
,
-2 -1 0 1 2 3 4 5
0.2
0.4
0.6
0.8
1.0
Tiempo
N(t)
Est frmula indica el comportamiento del sistema dinmico que se est mod-
elando, esto es, que la dependencia de con respecto al tiempo; al variar los
parmetros r, 1, o permite observar la dependencia de (t) respecto a los parmet-
ros.
A continuacin el Modelador puede preguntarse si esta formulacin es satis-
factoria para la descripcin del mundo real; si este es el caso puede usar su Modelo
bien sea para nes predictivos o para la toma de decisiones.
UN MODELO DE CONSERVACION DE MOMENTUM.
1. MODELOS 17
Supongamos que un objeto se deja caer desde un helicoptero otante a gran
altura del suelo, es necesario predecir la altura y velocidad del objeto en cualquier
instante futuro.
Observemos que la altura /(t), y la velocidad (t) pueden identicarse como las
variables dependientes (variables que el modelo quiere explicar). Supngamos que
el cuerpo se mueve solo verticalmente. As que para cambiar la posicin el cuerpo
hay fuerzas que actuan sobre el: Fuerzas de Propulsin- tienden a mover el cuerpo
en alguna direccin.
Fuerzas resistentes- tienden a retrasar el movimiento.
1
:tsI|
= )
l
(arrastre,otamiento)
donde la Fuerza de Arrastre- cuando el cuerpo cae a travs de la atmosfera.
Fuerza de Flotamiento- sujeta al cuerpo y tiende a mantenerlo.
Por lo tanto el '' puede ser expresado smbolicamente as:
jo:ic = )
2
(fuerza de propuls,fuerz. resist)
La fuerza de propulsin que actua sobre un cuerpo que cae desde una posicin de
reposo se debe a la gravedad. La fuerza gravitacional depende de la masa del objeto
y su distancia a la supercie de la tierra.
)jrojn| = 1
= atraccio: qraitacio:a| =
)(:a:a, a|tnra)
Si a la fuerza hacia abjo se le asigna un signo positivo, se puede usar la segunda
ley de Newton debidad a la gravedad como
1
= :q
(aqu hay que anotar que la gravedad varia con la distancia a la tierra).
Con respecto a las fuerzas de arrastre y de otameinto tenemos
arra:trc = 1
o
= )(c|, dc::id airc, arca soc cio:a|, ..)
)|ota:ic:to = 1
b
= )(dc::i aire,densid.objeto)
Si hacemos la hiptesis de que el arrastre es igual a una constante por la velocidad
del objeto, esto es
(1.5) 1
o
= c
donde c es una constante de proporcionalidad llamada coeciente de resistencia
o arrastre (kg/seg). El parmetro c toma en cuenta las propiedades del objeto
descendente, como la forma o aspereza de sus supercie, que afectan la resistencia
del aire. La relacin (8) no siempre es adecuada, en algunos casos puede ser una
relacin no lineal).
Ahora como queremos es determinar la velocidad nal de la caida libre del
objeto, el modelo se puede construir usando la expresin de aceleracin como la
razn de cambio de la velocidad con respecto al tiempo
d
dt
, por lo tanto una primera
aproximacin a nuestra realidad sera
18 2. MODELACIN MATEMTICA
:
d
dt
= 1 = :q c
MOVIMIENTO VIBRATORIO DE SISTEMAS MECANICOS.
Supnagase que tenemos un resorte ordinario de peso despreciable suspendido
verticalmente de un soporte jo.Colguemos un peso \ al resorte. Cuando el peso
esta en reposo describiremos su posicin como la posicin de equilibrio. Halemos el
peso hacia abajo una cierta distancia y luego soltemoslo, el peso empezar a oscilar
alrededor de la posicin de equilibrio. Determinar el movimiento del peso.
Nuevamente para construir nuestro MM consideremos las fuerzas que actuan
sobre el objeto:
Fuerza restauradora. Es la fuerza que tiende a regresar o restaurar el peso
desplazado a su posicin de equlibrio. La ley que gobierna esta fuerza es la ley de
Hooke.
Ley de Hooke
La fuerza ejercida por un resorte, tendiente a restaurar el peso \ a la posicin
de equilibrio, es proporcional a la distancia de \ a la posicin de equilibrio.
Fuerza amortiguadora- Es una fuerza de friccin que actua para decrecer las am-
plitudes de las oscilaciones. Podemos nuevamente considerar que para velocidades
pequeas, la magnitud de la fuerza amortiguadora es paroximadamente propor-
cional a la velocidad instantanea del peso en el resosrte.
Fuerzas externas. Una tal fuerza puede aparecer de varias maneras:por ejemplo,
procedente de vibraciones de la pared al que se halla sujeto el resorte, o sobre el
efecto sobre sta de un campo magnetico externo (si el resorte es de hierro), o
cuando al peso se le da un pequeo empuje cda vez que alcanza la posicin ms
baja.
Asumamos la direccin positiva hacia abajo como se muestra en la gura (1),
de modo que r (que es la posicin de \ medidad desde la posicin de equlibrio) es
positivo cuando \ est por debajo de la posicin de equilibrio y negativo cuando
\ est por encima de esta posicin.
Modelizacin del proceso.
Segn la segunda ley de Newton tenemos:
\
q
.
d
2
r
dt
2
= 1
:ts
1
:tsIs|
1
tr|
Por lo tanto
(1.6)
\
q
.
d
2
r
dt
2
= /r ,
dr
dt
)(t)
donde /, , son constantes positivas; 1
:ts
= /r, observe que si el cuerpo esta
hacia abajo la fuerza esta dirigida hacia arriba y si el peso esta arriba la fuerza esta
dirigida hacia abajo: El mismo razonamiento hacemos con la fuerza de friccin, la
cual consideramos que es proporcional a la velocidad instantanea del peso en el
resorte.
OBSERVACION. Vonsideremos el MM
d
2
r
dt
2
= /,:r
r(0) = 0, r
0
(0) = 0
1. MODELOS 19
cuya solucin es igual a r(t) = c
l
cos .
o
t c
2
sin.
o
t = cos(.
o
t c), donde
=
_
c
2
l
c
2
2
, c
l
= cos c, c
2
= sinc, .
o
=
_
/,:.
Si recordamos de la fsica elemental que el trabajo realizado por uan fuerza
constantyes a lo largo de un recorrido es igual al producto de dicha fuerza por el
espacio recorrido, e imaginamos, volviendo a la gura _____, que llevamos :
desde la posicin de equilibrio, dada por r = 0, hasta una posicin ., habremos
realizado un trabajo contra la fuerza de testitucun /r, con r recorriendo entre
0 y ., que estar dado por
l(.) =
:
_
0
(/r)dr = /
.
2
2
.
Esta maginitu l(.) recibe el nombre de energa potencial en el punto . de la
partcula de masa : sometida al campo de fuerzas estacionario (no dependiente
de t).
Supongamos ahora que una partcula de masa : est en movimiento a lo largo
de un eje Or. La fureza que acta sobre la partcula en el instante t, segn la
segunda ley de Newton,
1 = :
d
dt
,
el trabajo realizado por dicha fuerza desde la posicin r
l
= r(t
l
) hasta la posicin
r
2
= r(t
2
) ser de nuevo,
r2
_
r1
1dr = :
r2
_
r1
0
d =
1
2
:[(t
2
)[
2
1
2
:[(t
l
)[
2
,
osea igual a la variacin de la magnitud
l
2
:[(t)[
2
llamada energa cintica de la
partcula en el instante t. La energa total es
1 =
1
2
:[(t)[
2
l(r)
La energa potencial depende de la posicin y la cintica de la velocidad. En el caso
presente de un movimeinto armnico regido por el modelo ( ) se cumple la ley
de la conservacin de la energa, a saber, que la energa total permence constante
a lo largo de cualquier movimiento.
d1
dt
= :[[
d
dt
/r
dr
dt
= 0,
1 =
1
2
/
2
PROBLEMA SIMPLE QUE SE REDUCE A UNA ECUACION DE
TIPO HIPERBLICO: ECUACION DE ONDA.
Una ecuacin diferencial parcial que se presenta frecuentemente en matemti-
cas aplicadas, es la ecuacin de onda. Por ejemplo el estudio de ondas acsticas,
ondas en el agua y las ondas electromagnticas, estn todas basadas en la ecuacin
de onda.
Consideremos una cuerda elstica (la cuerda de un violn, un alambre , una
lnea de potencia elctrica), extendida rmemente entre soportes jos, al mismo
20 2. MODELACIN MATEMTICA
nivel. ( Ver gura 1 ).
Denotemos como 1 la longitud de la cuerda. El eje A est localizado a lo largo de
la cuerda , y los extremos estn localizados en A = 0 y A = 1. Si la cuerda es
puesta en movimiento en un tiempo inicial t = t
0
(pulsndola por ejemplo), vibrar
libremente; el problema consistir en la determinacin de la forma de la cuerda en
cualquier momento, y en la determinacin de la ley del movimiento en cada punto
de la cuerda en funcin del tiempo.
Consideremos el problema ms sencillo; supongamos que los desplazamientos de
la cuerda se hallan en el mismo plano Al , y que el vector desplazamiento l es
perpendicular en cualquier momento al eje A; entonces el proceso oscilatorio se
puede describir mediante una funcin l(A, t) que caracteriza el desplazamiento
vertical de la cuerda.
La expresin matemtica del concepto de exibilidad reside en que las tensiones
que surgen en la cuerda estn dirigidas por la tangente a su perl instantneo, o
bien no existen fuerzas que se opongan a doblarla (Figura 2).
1. MODELOS 21
tomemos un pequeo elemento de la cuerda de longitud X, entre los puntos A
l
y A
2
( Figura 3).
Despreciamos el cuadrado de l
r
con respecto a la unidad, esto es solo con-
sideraremos desplazamientos n(r, t) pequeos. Como la cuerda no se resiste a la
exin,
o
t
=
_
2
l
_
(1 l
2
r
)dr = (A
2
A
l
) = o
Por lo tanto, demostramos que en el proceso oscilatorio no hay alargamiento
de los segmentos de cuerda.
La tensin es una funcin de (A, t). Del razonamiento anterior y de la ley de
Hooke
l
vemos que la magnitud de la tensin T en cada punto no vara con el
tiempo (PORQUE?), es ms T(r) = T
0
=, donde T
o
es una constante. O sea que
tampoco depende de A; demostremos esta ltima armacin. Veamos : Sea T
r
, T
u
proyecciones de T sobre A y l respectivamente (Figura 4).
22 2. MODELACIN MATEMTICA
T(A, t
l
) = /
0l
0A
(A, t
l
)
T(A, t
2
) = /
0U
0X
(A, t
2
)
T
r
= T(A) cos 0 =
1(X)
_
(1 U
2
X
= T(A)
(1.7) T
u
(A) T(A) sin0 = T(A) lan0 = T(A)l
,
Recordemos que T = /, es el alargamiento por unidad de longitud y / es el
modulo de Young, que es constante. La ltima igualdad en ecuacin ( ) se da ya
que 0 es muy pequeo.
Sobre el segmento [A
l
, A
2
[ actan fuerzas de tensin, fuerzas externas y fuerzas de
inercia.
}ut::os :otc|oJos sob:t
1 = 0
ya que se consideran solo las oscilaciones transversales. Ahora bien, las fuerzas
externas y las de inercia estn dirigidas, por hiptesis, a lo largo del eje l; entonces
sobre el eje A tenemos que T
r
(A
2
) T
r
(A
l
) = 0, o sea T
r
(A
2
) = T
r
(A
l
), asi que
T(A) = T
o
.
Ahora deduzcamos la ecuacin diferencial que rige el fennemo fsico. Aplicando la
segunda ley de Newton al elemento de cuerda, tenemos que la componente de la
cantidad de movimiento del segmento [A
l
, A
2
[ sobre el eje l es igual a :
_
2
l
l
|
(:, t)j(:)d:
donde j es la densidad lineal de la cuerda. Entonces,
_
2
1
[l
|
(:, t
2
) l
|
(:, t
l
)[j(:)d: =
_
|2
|1
T
0
[l
(A
2
, t) l
(A
l
, t)[dt
_
2
1
_
|2
|1
1(:, t)d:dt (1.8)
La expresin (19) es la variacin de la cantidad de movimiento en el intervalo de
tiempo ^t = t
2
t
l
, igual al impulso de las fuerzas que actan formadas por la
tensin T
0
l
(A
2
, t) T
0
l
(A
l
, t), y por la fuerza externa distribuida continua-
mente con densidad 1(A, t) calculada en la unidad de longitud. Es de anotar que
la ecuacin (19) es la ecuacin integral de onda, la cual se utiliza frecuentemente
cuando es necesario considerar soluciones generalizadas. Para pasar de la ecuacin
(1) a la ecuacin diferencial, supongamos que l(A, t) C
2
, y apliquemos dos veces
el teorema del valor medio para obtener:
l
||
(:
+
, t
+
)j(:
+
)^t^A = T
0
[l
(:
++
, t
++
)[ 1(:, t)^t^A
donde : :
+
, :, :
++
pertenecen al intervalo (A
l
, A
2
) y los puntos t
+
, t, t
++
(t
l
, t
2
).
1. MODELOS 23
Simplicando y pasando al lmite cuando A
2
A
l
, t
2
t
l
, obtenemos la
ecuacin diferencial de las oscilaciones transversales de la cuerda:
(1.9) T
0
l
= j(A)l
||
1(A, t)
Si la densidad es constante, j = C , entonces (20) se convierte en:
(1.10) l
||
= a
2
l
1(A, t)
donde
a =
_
(T
0
,j) y 1(A, t) =
1
j
1(r, t)
Es posible identicar a como la velocidad con la cual se mueve a lo largo de la cuerda,
una pequea perturbacin (onda). La velocidad de onda, a , vara directamente con
la tensin de la cuerda e inversamente con la densidad del material de la cuerda.
CONDICIONES DE FRONTERA Y CONDICIONES INICIALES
PARA LA ECUACION DE ONDA
Al describir matemticamente un fenmeno fsico, ante todo hay que plantear
(colocar) el problema, es decir , enunciar las condiciones sucientes para la deter-
minacin unvoca del proceso.
Las ecuaciones en derivadas parciales, en general dan un conjunto innito de
soluciones, por eso, en el caso en que el problema fsico se reduce a una ecuacin
diferencial en derivadas parciales, para la caracterizacin unvoca del proceso es
necesario agregar a la ecuacin ciertas condiciones complementaras denominadas
condiciones de frontera (contorno) y condiciones iniciales.
Considerando el problema sobre oscilaciones transversales de la cuerda con ex-
tremos jos, la funcin l(A, t) nos da la desviacin de la cuerda del eje A en el
momento t.
Si los extremos de la cuerda estn jos entonces en cualquier momento t el valor
l(0, t) = 0 y l(|, t) = 0 , nos dan las condiciones de frontera. Adems el proceso
de las oscilaciones de la cuerda dependen de su forma inicial y de la distribucin de
las velocidades, es decir, hay que dar las condiciones iniciales :
l(A, t
0
) = /(r),
0l
0t
(A, t
0
) = q(A)
Puede existir otros tipos de condiciones de frontera tales como:
l(0, t) = q
l
(t), l(|, t) = q
2
(t)
que nos indican el movimiento de los extremos de la cuerda segn una ley dada.
Si consideramos el problema sobre las oscilaciones longitudinales de un resorte,
uno de cuyos extremos est jo y el otro libre; la ley del movimiento del extremo libre
no est dada y a menudo es la funcin incgnita. En el punto A = 0 , l(0, t) = 0 ;
y en el extremo libre A = |, la tensin del resorte T(|, t) = 1
JI(l,|)
J
es igual a cero
( no hay fuerzas externas); de modo que el enunciado matemtico de la condicin
de un extremo libre tiene la forma :
24 2. MODELACIN MATEMTICA
0U(l, l)
0X
= 0;
si hay fuerza q
l
(t) entonces
0U(l, l)
0X
=
q
l
(t)
/
= q
l
(t)
Es tambin tpica la condicin
0l(|, t)
0A
= /l(|, t)
que aparece cuando existe enlace elstico en alguno de los extremos.
Las derivadas con respecto a t pueden gurar tambin en las condiciones de fron-
tera, por ejemplo 1l
r
(|, t) = cl
|
(|, t) , que signica que el extremo del resorte
experimenta la resistencia del medio proporcional a la velocidad de su movimiento.
1.2.1. Problemas de discusin. Un tubo semiacotado (r 0) lleno de un gas
ideal tiene en el extremo (r = 0) un pistn de masa : que se mueve libremente. En
el instante t = 0 por medio de un golpe se le imprime al pistn una velocidad inicial
de
o
. Las desviaciones iniciales y la velocidad inicial de las particulas del gas son
iguales a cero. plantear un MM con el cual se pueda determinar la propagacin de
la onda en el gas.
ECUACION DE CALOR, ECUACION DE DIFUSION DE UNA
SUSTANCIA
A nivel microscpico los mecanismos fsicos de la conduccin son complica-
dos; abarcan fenmenos tan variados como colisiones molecualres en los gases, las
vaibraciones de la red de los cristales y el ujo de electrones libres en los met-
ales.Sin embargo, el Ingeniero evita, en la medida de lo posible, la consideracin a
nivel microscpico y preere valerse de leyes fenomenolgicas a nivel macroscpico.
La ecuacin de conduccin de calor es una ED que modela tanto el ujo de calor
como una variedad de fenmenos scos, qumicos y biolgicos relacionados con los
procesos de difusin.
LEY BASICA. La primera ley de la termodinmica es una manera de enun-
ciar el principio de conservacin de la energa. Consideremos un sistema cerrado
consistente de una masa solida ja. El sistema tiene un volumen V y el solido una
densidad j. Las vibraciones moleculares del cuerpo generan energa que percibimos
como calor, por tanto, calor es energa que se transere de un lugar a otro. Flujo
de calor es la transferencia de energa que se lleva a cabo como consecuencia de las
diferencias de temperatura.
OBSERVACION. La cantidad de calor que se comunica a un cuerpo se puede
expresar en varias unidades: btu, erg, joule o calora. La calora (cal) es la ms usada,
se dene como la cantidad de calor que se necesita para elevar la temperatura de
un gramo de agua en 1
C, desde 14.5
a 15.5
C. Una calora es igual a 4.186 J.
Supongamos que se transere calor al sistema a una velocidad
`
Q y dentro del
slido puede generarse calor, por fusin nuclear, o por una corriente elctrica a la
velocidad
`
Q
u
.
1. MODELOS 25
OBSERVACION. Podemos suponer que los solidos son incomprensibles de mo-
do que no hay trabajo realizado por el sistema o sobre l.
PRINCIPIO BASICO. El principio de conservacin de energa exige que en el
intervalo de tiempo ^t
Variacin de energa interna dentro del sistema = calor transferido hacia el
inetrior del sistema calor generado dentro del sistema
^l =
`
Q^t
`
Q
u
^t
^l
^t
=
`
Q
`
Q
u
Si se entrega calor en la misma cantidad a masa iguales de distintas sustancias,
los aumentos de temperatura son diferentes. Por ejemplo si se entrega una calora a
un gramo de plata, la elevacin de temperatura ser mayor (10
C) que en el caso de
un gramo de agua. Se dice que las sustancias tienen diferentes calores especcos.
Para un slido incomprensible dn = C
u
dT, donde n es la energa interna es-
pecca, c
u
es la capacidad calorca,
(la capacidad calorca C
u
de cualquier sustancia se dene como la cantidad
de energa calrica que se requiere para elevar la temperatura de la sustancia en un
grado Celsius), T es la temperatura.
La capacidad calorca de un cuerpo es proporcional a su masa. Por esto es
conveniente denir la capacidad calorca por unidad de masa, c, llamada calor
especco,
(1.11) c =
C
u
:
Las unidades de medida son de C
u
(J/
C) y c (J/kg
C).
Combinando estas dos expresiones se puede expresar la energa calrica trans-
ferida entre un cuerpo de masa : y los alrededores para un cambio de temperatura
como: ^l = :c^T.
OBSERVACION. Algunos conceptos tiles que se manejan en teora calorca
son: Calor latente. Una sustancia experimenta un cambio en su temperatura
cuando se transere calor entre la sustancia y los alrededores. Pero existen situa-
ciones donde el ujo de calor no tiene como resultado un cambio en la temperatura.
Esto ocurre siempre que las caractersticas fsicas de la sustancia cambien de una
26 2. MODELACIN MATEMTICA
forma a otra, lo que se conoce como cambio de fase. Algunos cambios de fase co-
munes son slido a lquido (fusin), lquido a gas (ebullicin). Todos estos cambios
de fase implican un cambio en la energa interna. La energa requerida se conoce
como calor de transformacin. Cuando un sistema sufre un cambio de fase, debe
haber una transferencia de calor. Si 1 es el calor latente de cambio de fase, necesario
para que una unidad de masa cambie de fase, entonces el calor absorbido durante el
cambio de estado es: Q = :1, la magnitud 1 depende de la naturaleza del cambio
de fase, as como de las propiedades de la sustancia. El calor de fusin 1
}
se usa
cuando el cambio de fase es de slido a lquido, y el calor de vaporizacin 1
u
es
el calor latente correspondiente al cambio de fase de lquido a gas. En cada caso
para los cambios de fase en sentido opuesto se tiene calor de solidicacin y calor
de condensacin; 1 se mide en J/kg.
Transferencia de calor. Es importante saber con que rapidez se transere el
calor entre el sistema y sus alrededores y conocer los mecanismos de transferencia
de calor.
Radiacin. Todos los cuerpos irradian energa continuamente en la forma de
ondas electromagnticas y la rapidez con la cual un cuerpo emite energa radiante
esta dada por la ley de Stefan.
Conveccin. Es un proceso de transferencia de calor en el cual la sustancia
calentada se mueve de un lugar a otro. Por ejemplo si una capa de aire o agua se
calienta su densidad disminuye, se expande y se eleva, esta masa caliente transere
calor al medio circundante por conveccin. Puede ser natural o forzada (por ejemplo
aire caliente movido por un ventilador).
Conduccin. La ley fenomenolgica que rige la conduccin de calor fue prpues-
ta por J. B. Fourier (1822). En este proceso la transferencia de calor se produce a
escala atmica como un intercambio de energa cintica entre las molculas, donde
las partculas menos energticas ganan energa al chocar con las ms energticas. La
conduccin de calor slo ocurre si hay diferencias de temperatura entre dos partes
del medio conductor. Se ha demostrado empricamente que si tenemos dos placas
de la misma rea cuyas caras opuestas se encuentran a diferentes temperaturas
T
l
y T
2
, con T
2
T
l
y separadas por una pequea distancia /, se encuentra que el
calor ^Q transferido en un tiempo t uye del extremo caliente al fro. La rapidez
de transferencia de calor ^Q,^t esta dada por
^Q
^t
c([T
2
T
l
[),/
Si se llama H al calor transferido por unidad de tiempo (W) y se usa para repre-
sentar
^Q
^t
, si se toma cambios innitesimales, obtenemos la que se conoce como
la ley de conduccin de calor
(1.12) H =
0Q
0t
= /
0T
0r
/ es el coeciente de conductividad trmica del material, magnitud que representa la
capacidad con la cual la sustancia conduce calor y produce la consiguiente variacin
de temperatura;
0T
0r
es el gradiente de temperatura. El signo menos indica que la
conduccin de calor es en la direccin decreciente de temperatura.
Un problema de Ingeniera. Se tiene un alambre homogeneo de longitud |,
0 _ : _ |, el lado izquierdo (: = 0) esta aislado trmicamente, en el lado derecho
1. MODELOS 27
(: = |) ocurre un intercambio de calor con el medio externo y hay una fuente
calorica; conocemos la distribucin de temperatura en el momento inicial t = 0.
El problema de Ingeniera consiste en controlar la temperatura del medio externo
y la densidad de la fuente de calor, de tal forma que en el momento T 0 la
distribucin de temperatura se haga lo ms proximo a una temperatura deseada.
Intentemos construir un MM que nos permita resolver este problema.
Consideremos el alambre de seccin transversal uniforme, orientada de tal man-
era que el eje r contenga el eje del alambre (ver gura); designemos los extremos
por r = 0 , r = 1.
Supondremos que los lados del alambre estn perfectamente aislados de tal
manera que no pasa calor a travs de ellos, y que la distribucin de temperatura
T depende nicamente de la posicin sobre el eje r y del tiempo t , y no de las
coordenadas laterales j, .; esto es T(r, t) es funcin slo de las variables r, t. En
otras palabras suponemos que la temperatura permanece constante sobre cualquier
seccin transversal de la barra; esta hiptesis es generalmente satisfactoria cuando
las dimensiones laterales del alambre son pequeas comparadas con su longitud.
Hallemos la ecuacin que debe satisfacer la funcin T(r, t):
Considrese un elemento de la barra entre las secciones transversales r = r
0
,
r = r
0
^r. La cantidad de calor de izquierda a derecha a travs de la seccin
transversal r = r
0
, es
Q(r
0
, t) = /T
r
(r
0
, t),
de la misma manera la cantidad de calor de izquierda a derecha a travs de la
seccin transversal r = r
0
^r est dada por
Q(r
0
^r, t) = /T
r
(r
0
^r, t);
y la cantidad de calor en (r
0
, r
0
^r) es
Q = /[T
r
(r
0
^r, t) T
r
(r
0
, t)[
La cantidad de calor que se acumula en un cuerpo es
Q = c:^T = cj\ ^T
donde c es el calor especco(cantidad de calor(en calorias) necesario para el-
evar 1 grado la temperatura de 1 gramo de material), : la masa del cuerpo, j su
densidad y \ el volumen (area, longitud).
Si la variacin de temperatura tiene una magnitud diferente en distintas partes
de la barra, entonces
Q =
_
r0.r
r0
cj^Tdr
Como en el alambre hay una fuente (surge o se absorvee calor); la emisin de
calor la podemos caracterizar por la densidad de las fuentes trmicas 1(r, t) en
el punto r en el momento t. Como resultado de la accin de estas fuentes en el
intervalo (r
0
, r
0
^r) durante un intervalo de tiempo (t, t ^t) ; se emitir una
28 2. MODELACIN MATEMTICA
cantidad de calor dQ = 1(r, t)drdt , o en forma integral
Q =
_
|2
|l
_
r2
rl
1(r, t)drdt
Segn la ecuacin del balance de calor en (r
l
= r
0
, r
2
= r
0
^r) durante
(t
l
, t
2
) obtenemos:
_
|2
|l
[/T
r
(r
0
^r, t) /T
r
(r
0
, t)[dt
_
r2
rl
_
|2
|l
1(r, t)drdt
=
_
r2
rl
cj[T(r, t
2
) T(r, t
l
)[dr
que es la ecuacin del calor en forma integral.
Para obtener la ecuacin de la conduccin del calor en forma diferencial, supong-
amos que T(r, t) posee derivadas continuas T
rr
, T
|
; aplicando el teorema del valor
medio tenemos
(1.13)
0
0r
(/
0T
0r
) 1(r, t) = cj
0T
0t
Como nuestro alambre es homognea entonces /, c, j se pueden considerar con-
stantes y la ecuacin se escribe comunmente
(1.14) n
|
= a
2
n
rr
)(r, t)
donde a
2
= /,cj.( j se conoce como la difusividad del material)
OBSERVACION. La densidad de las fuentes de calor pueden depender de la
temperatura. En el caso de un intercambio trmico con el medio, que se somete a
la ley de Newton, la cantidad de calor que pierde (osea la supercie de la barra no
esta aislada) la barra es igual a.
1
0
= /(T 0)
donde 0(r, t) es la temperatura del medio, y h es el coeciente de intercambio
trmico,
De esta manera, la densidad de las fuentes calorcas en el punto r en el mo-
mento t es igual a
1 = 1
l
(r, t) 1
0
(r, t)
donde 1 es la densidad de las otras fuentes de calor.
Entonces obtenemos
(1.15) T
|
= a
2
T
rr
cT )(r, t)
donde c = /,cj ,
)(r, t) = c0(r, t) 1
l
(r, t),cj
Planteamiento de las Condiciones Iniciales y de Frontera (Contorno)
Para obtener una solucin nica de la ecuacin de conduccin de calor, es
necesario agregar condiciones iniciales y de frontera. La condicin inicial consiste
en dar los valores de la funcin T(r, t) en el momento inicial t
0
. Respecto a las
condiciones de frontera, estudiaremos tres tipos:
1. MODELOS 29
1. En el extremo del alamabre r = 0 se da la temperatura T(0, t) = q
l
(t),
donde q
l
(t) es una funcin dada en cierto segmento (0, t
o
), siendo t
o
el intervalo de
tiempo durante el cual se estudia el proceso.
2. En el extremo r = 1 se da el valor de la derivada
0T
0r
(1, t) = q
2
(t)
A esta condicin llegamos si se da el ujo trmico Q(1, t) que pasa por la seccin
del extremo de la barra
Q(1, t) = /
0T
0r
(1, t)
` o
0T
0r
(1, t) = 1,/Q(1, t) = q
2
(t)
3. En el extremo r = 1 (r = 0) est dada una relacin lineal entre la derivada y la
funcin
0T
0r
(1, t) = `[T(1, t) 0(t)[
Esta condicin de frontera corresponde a un intercambio trmico de acuerdo con la
ley de Newton en la supercie del cuerpo con el medio ambiente, cuya temperatura
( es conocida). Utilizando las dos expresiones del ujo trmico que sale por el corte
r = 1(r = 0)
Q = /(T 0) , Q = /
0T
0r
obtenemos
/(T 0) = /
0T
0r
,
de esta forma obtenemos
0T
0r
(1, t) = `[T(1, t) 0(t)[
donde ` = /,/ es el coeciente de intercambio trmico.
Para r = 0, la condicin ser
0T
0r
(0, t) = `[T(1, t) 0(t)[
Anlogamente existen otros tipos de condiciones de frontera, por ejemplo,
c
l
0T
0t
= /
0T
0r
/(T l
0
);
donde c
l
es la capacidad calorca, l
0
la temperatura del medio exterior.
Si el medio no es homogneo, y los coecientes de la ecuacin son funciones
discontinuas en el intervalo (0, 1) en el cual se busca la solucin del problema, se
particiona por los puntos de discontinuidad de los coecientes, de tal manera que
en cada subintervalo la funcin T satisfaga la ecuacin de conduccin calor, y en las
fronteras las condiciones de conjugacin. En el caso ms simple, estas condiciones
consisten en la continuidad de la temperatura y del ujo trmico:
T(r
0
0, t) = T(r
0
0, t)
/(r
0
0)
0T
0r
(r
0
0, t) = /(r
0
0)
0T
0r
(r
0
0, t).
30 2. MODELACIN MATEMTICA
La formulacin matemtica de nuestro problema quedara entonces de la sigu-
iente forma:
J(T) =
_
l
0
[T(r, t
o
, n) j(r)[
2
dr
T
|
(r, t) = a
2
T
ss
(r, t) )(r, t) Q = 0 < r < |, 0 < t _ t
o
T
s
(0, t) = 0 0 < t _ t
o
T
s
(|, t) = i[0(t) T(|, t)[ 0 _ r _ |
T(r, 0) = c(r) 0 _ r _ |
Se supone que n = (0(t), )(:, t)) es el control, el cual pertenece a cierto conjunto l.
Como por ejemplo, las funciones 0(t), )(r, t) son integrables al cuadrado en [0, t
o
[
y Q respectivamente.
ECUACION DE LA DIFUSION
Si el medio est lleno de gas de modo no uniforme, tiene lugar la difusin de
ste, de los lugares de mayor concentracin a los de menor concentracin. Este
mismo fenmeno tiene lugar en las soluciones, si la concentracin de la sustancia
diluida en el volumen no es constante. El proceso de difusin en un tubo vaco, o
en un tubo lleno de un medio poroso , suponiendo que en todo momento de tiempo
la concentracin del gas ( de la solucin) es igual en cada seccin, se describe por
la ecuacin
(1.16)
0
0r
(1
0l
0r
) = c
0l
0t
donde 1 es el coeciente de difusin , y c(r) el coeciente de porosidad; l(r, t) es
la concentracin en el corte r en el momento t.
PROPAGACIN DE CALOR EN EL ESPACIO
Consideremos un cuerpo formado por cierto material que ocupa un dominio
acotado en tres dimensiones 1, con frontera I, tal como se ilustra en la gura
1. Entendemos el calor como una forma de energa asociada a la agitacin tr-
mica de las moleculas del material. Nuestro objetivo es describir matemticamente
el proceso por el que el cual se distribuye espacialmente en 1 y evoluciona a lo largo
del tiempo. Concretamente, a partir de leyes fsicas, vamos a obtener una ecuacin
en derivadas parciales. Para ello, durante un intervalo arbitrario de tiempo [t
l
, t
2
[,
estudiaremos un elemento arbitrario en 1 con volumen \ y supercie exterior o y
cuyos puntos se representan por las coordenadas (r, j, .).
En este elemento suponemos que el calor es protagonista de tres procesos:
produccin, almacenamiento y transporte.
gura 1
Estos procesos estn ligados entre s por el siguiente principio de conservacin:
(1.17) Q1 = QQT
donde
1. MODELOS 31
Q1 = Calor producido en \ en [t
l
, t
2
[
Q = Calor almacenado en \ en [t
l
, t
2
[
QT = Calor transportado a trves de o en [t
l
, t
2
[
Representando matemticamente cada uno de estos procesos, la ecuacin (1)
nos llevar a una ecuacin en derivadas parciales, como veremos a continuacin.
Produccin de calor: Suponemos la existencia de una funcin )(r, j, ., t) que
representa el calor neto producido por unidad de volumen y unidad de tiempo. S
) 0 se tiene un aumento de calor (produccin propiamente dicha); ) < 0 signica
disipacin de calor. La integral
_
u
)(r, j, ., t)drdjd. describe el calor producido
por unidad de tiempo en el instante t en el volumen \ mientras que
|2
_
|1
)(r, j, ., t)dt
da cuenta del calor producido en un punto (r, j, .) por unidad de volumen en el
intervalo [t
l
, t
2
[. Consecuentemente, el calor total producido en el volumen \ en
[t
l
, t
2
[ viene dado por:
Q1 =
|2
_
|1
_
u
)(r, j, ., t)drdjd.dt
Almacenamiento de calor: Sea c(r; j; .; t) una funcin que representa la
densidad de calor instantnea en cada punto, es decir la cantidad de calor por
unidad de volumen. La capacidad de almacenamiento est ligada a la posibilidad
de variar esta densidad a lo largo del tiempo, de manera que el calor almacenado
en \ en el intervalo [t
l
, t
2
[ se expresa en la forma:
Q =
_
u
[c(r, j, ., t
2
) c(r, j, ., t
l
)[ drdjd. =
=
|2
_
|1
_
u
0c
0t
(r, j, ., t)drdjd.dt
Transporte de calor: El transporte supone un ujo en alguna direccin.
Para cuanticarlo se introduce el vector de ujo 1 que es el campo vectorial cuyas
componentes en la base cartesiana i, ,, / son
1(r, j, ., t) = 1
l
(r, j, ., t)i 1
2
(r, j, ., t), 1
3
(r, j, ., t)/
Su modulo [1[ =
_
1
2
l
1
2
2
1
2
3
representa la cantidad de calor que se trans-
porta por unidad de rea y de tiempo. Para expresar la cantidad de calor que
atraviesa la supercie o, consideremos en cualquiera de sus puntos (r, j, .), una
base de vectores unitarios formada por el vector : en la direccin normal y los vec-
tores t
l
, t
2
en el plano tangente a o, tal como se ilustra en la gura 2. Por convenio
suele darse sentido positivo a : hacia el exterior de la supercie. Con ello el ujo
en cualquier punto de o puede descomponerse en la forma:
1 = c: ,
l
t
l
,
2
t
2
32 2. MODELACIN MATEMTICA
Dado que ,
l
t
l
,
2
t
2
es un vector sobre el plano tangente, la componente
c =< 1, : en la direccin normal representa la cantidad de calor por unidad de
rea y de tiempo que sale por cada punto a traves de la supercie o. Por tanto la
cantidad de calor que atraviesa la supercie o en [t
l
, t
2
[ es
Q
T
=
|2
_
|1
_
s
< 1, : d:dt =
|2
_
|1
_
s
di1drdjd.dt (Donde se ha utilizado el
teorema de la divergencia.). Con ello la ecuacin de conservacin puede escribirse
en la forma
|2
_
|1
_
s
_
)
0c
0t
di1
_
drdjd.dt = 0
Aqu \ representa un volumen arbitrario en \(Gamma) y [t
l
, t
2
[ es un segmento
arbitrario. Por tanto, en virtud de la continuidad del integrando, tenemos que
)
Jt
J|
di1 = 0 en todos los puntos de \ y en cualquier instante t > t
0
, siendo
t
0
un instante inicial dado.
Por tanto podemos escribir
0c
0t
(r, j, ., t) di1(r, j, ., t) = )(r, j, ., t), \(r, j, .) \, \t > 0
Esta expresin es una ecuacin en derivadas parciales, pero en ella aparecen
dos funciones desconocidas c y 1. Para que la ecuacin tenga utilidad practica es
necesaario reducir las dos incgnitas a una sola. Esto requiere profundizar mas en
la modelacin de los procesos de almacenamiento y de transporte. En ello juega
papel esencial la temperatura.
Calor almacenado y temperatura: Estudios experimentales han llevado a
aceptar que la cantidad de calor almacenada depende del tipo de material, de la
distribucin de su masa y se ajusta con suciente precisin a la siguiente expresin:
(1.18) c(r, j, ., t) = j(r, j, ., t)c(r, j, ., t)n(r, j, ., t)
donde j 0 es la densidad (masa por unidad de volumen), c 0 es el calor
especico, qu reeja la capacidad del material para acumular calor, y n es la temper-
atura. Consideremos que j y c no dependen de t, lo que supone que las propiedades
del material no se alteran con el proceso a lo largo del tiempo. En tal caso, el alma-
cenamiento de calor es directamente proporcional a la variacin de la temperatura,
es decir
(1.19)
0c
0t
(r, j, ., t) = j(r, j, ., )c(r, j, .)
0n
0t
(r, j, ., t)
Transporte de calor(conduccin) y temperatura: Como se ha menciona-
do anteriormente, el calor esta asociado a la energa del movimiento molecular. Con
esta ptica, el transporte del calor puede verse como una transferencia de energa
entre molculas. Existen dos mecanismos fundamentales para esta transferencia:
conduccin, en que el calor se transere por el contacto entre molculas vecinas y
1. MODELOS 33
por conveccin, en que el calor se transporta por el movimiento de las molrculas
desde una regin a otra.
Aqu vamos a considerar el transporte por conduccin. Este proceso est de-
scrito por la ley de Fourier, que relaciona el vector de ujo con la temperatura en
la forma
1(r, j, ., t) = 1(r, j, .)\n(r, j, ., t)
donde 1 es la matriz de conductividad trmica, simtrica y con coecientes /
I
(r, j, .) >
0, y \n = (n
r
, n
, n
:
)
T
es el vector gradiente de temperatura.
Ms explcitamente podemos escribir
1 = 1\n =
_
_
/
ll
n
r
/
l2
n
/
l3
n
:
/
l2
n
r
/
22
n
/
23
n
:
/
l3
n
r
/
23
n
/
33
n
:
_
_
Los coecientes /
I
dan cuenta de la facilidad del material para conducir el caloe
en las tres dimensiones del espacio proporcionalmente a las variaciones de temper-
atura n
r
, n
, n
:
. El signo negativo indica que el sentido del transporte siempre
viene dado por un ujo hacia puntos de menor temperatura.
Las expresiones () y () son dos ecuaciones constitutivas que nos han permitido
expresar dos parmetros caracteristicos del material, como son el calor especic c,
la densidad j y la conductividad trmica 1. De esta forma la ecuacin ( ) queda
con la temperatura como nica funcin incgnita en la forma
(1.20) j(r, j, .)c(r, j, .)n
|
(r, j, ., t) di [1(r, j, .)\n(r, j, ., t)[ = )(r, j, ., t)
Esta es la llamada ecuacin del calor. Introduciendo ciertas hiptesis, pueden obten-
erse formas simplicadas de la ecuacin anterior ( ).
Por ejemplo, si el material es homogneo, sus parmetros j, c, / son iguales en
todo el dominio y la ecuacin ( ) se reduce a la siguiente forma con coecientes
constantes:
(1.21) jcn
|
[/
ll
n
rr
/
22
n
/
33
n
::
2/
l2
n
r
2/
l3
n
r:
2/
23
n
:
[ = )
Suponiendo que la matriz de conductividad trmica sea diagonal, la ecuacin ( )
queda en la forma
(1.22) jcn
|
[(/
ll
)
r
n
r
(/
22
)
(/
33
)
:
n
:
[ [/
ll
n
rr
/
22
n
/
33
n
::
[ = )
El carcter general diagonal corresponde a suponer que la conductividad tiene los
ejes r, j, . como direcciones privilegiadas, en el sentido de que el ujo en la direccin
r depende nicamente de la variacin de la temperatura en esta direccin (nr) y
lo mismo ocurre en las otras dos direcciones.
Si el material es istropo, la conductividad es la misma en las tres direcciones
y se caracteriza por una funcin escalar /. As 1(r, j, .) = /(r, j, .)1 donde 1 es
la matriz identidad, y la ecuacin toma la forma
jcn
|
[/
r
n
r
/
/
:
n
:
[ / [n
rr
n
n
::
[ = )
34 2. MODELACIN MATEMTICA
Si el material es istropo y homogeneo, esta ecuacin se reduce a la forma ms
sencilla con coecientes constantes
(1.23) jcn
|
/\
2
n = ) (r, j, ., t)
Condiciones iniciales y condiciones de contorno(frontera). La ecuacin ( )
nos da una herramienta par describir la evolucin de la temperatura en el interior
\ de un cierto dominio durante un intervalo de tiempo. Al resolver la ecuacin se
obtienen innitas soluciones, lo cual es inaceptable si se pretende disponer de un
modelo que describa una situacin prctica sin ambiguedades. La ecuacin diferen-
cial ha sido obtenida a partir de una representacin matamtica de los procesos de
produccin, almacenamiento y conduccin del calor. Estos procesos son internos
en el sistema objeto de estudio , no dependiendo de su interaccin con el medio
exterior. Adems no tienen memoria, en el sentido de que no dependen de la his-
toria temporal que haya tenido el sistema antes del intervalo en el que queramos
estudiar su evolucin. Si se quiere determinar completamente la distribucin de
la temperatura en \ a partir de un cierto instante inicial, es necesario incorporar
a la ecuacin diferencial ( ) dos tipos de condiciones: condiciones iniciales, que
imponen un estado conocido del sistema en un instante inicial t
0
, y condiciones
de contorno, que jan ciertas condiciones en la frontera I del dominio.
Condiciones iniciales. La presencia de una derivad temporal de primer orden
en la ecuacin ( ) hace necesario especicar la distribucin inicial de la temperatura,
es decir
(1.24) n(r, j, ., t
0
) = q(r, j, .), (r, j, .) \
donde q es una funcin dada.
Condiciones de contorno. Existen distintas situaciones fsicas que pueden
traducirse en condiciones en la frontera del dominio. Vamos a ver tres casos de los
que se presentan habitualmente.
Temperatura prescrita: La situacin ms sencilla consiste en mantener la tem-
peratura de los puntos de la frontera en unos valores dados, lo que puede expresarse
en la forma
n(r, j, ., t
0
) = /(r, j, ., t), (r, j, .) I, t > t
0
como caso especial puede considerarse una temperatura constante. En partic-
ualar puede ser / = 0, en cuyo caso se dice que la condicin es homognea.
Flujo de calor prescrito: El ujo de calor a trves de un punto de la frontera
en la direccin normal : es, segn la ley de Fourier
(1.25) < 1, : = < 1\n, :) = < \n, 1: =
0n
0:
|
donde
Ju
Jn
!
es la derivada direccional en la direccin denida por el vector :/ =
1:. Podemos considerar la existencia de un mecanismo capaz de regular este ujo
en los puntos de la frontera y mantenerlo en unos valores deseados. Esto puede
expresarse en la forma
(1.26)
0n
0:
(r, j, ., t) = /
0
(r, j, ., t), (r, j, .) I, t > t
0
donde /
0
es una funcin dada.
1. MODELOS 35
Si se considera el caso de una material istropo con matriz de conductividad
diagonal 1 = /|, la expresin del ujo ( ) se modica en la forma
(1.27) < 1, : = / < \n, :) = /
0n
0:
Considerando / = /
0
,/ la condicin () queda ahora en la forma
(1.28)
0n
0:
(r, j, ., t) = /(r, j, ., t), (r, j, .) I, t > t
0
En particular los casos /
0
= 0 y / = 0 signican que no hay ujo a travs del
contorno, por lo que el dominio est aislado trmicamente (condicin de contorno
homognea).
Ejercicio. Investigar para el caso en que existe un intercambio de calor con el
medio ambiente.
MODELOS MATEMTICOS PARA LOS PROCESOS DE SOR-
CIN DINMICA DE UNA SOLA COMPONENTE.
Demos la descripcin del modelo matemtico de sorcin dinmica de una sola com-
ponente.
Supongamos que a travs de una columna cilndrica de seccin transversal constante
(el eje del cual lo tomamos como el eje de coordenada r), llena uniformemente de
granos de un sorbente (con coeciente de porosidad igual a i (0, 1)), se hace
pasar un gas con velocidad constante igual i bajo temperatura constante. La con-
centracin del gas en la entrada de la columna es igual a j(t).
Representemos por n(r, t) la concentracin del gas en el ujo, calculado en un
volumen unitario del espacio libre, por a(r, t) la concentracin del gas absorbido,
calculado sobre el volumen unitario de la columna. Consideremos un elemento ar-
bitrario de la columna acotado por las secciones transversales r = r
l
y r = r
2
. El ujo de la sustancia a travs de estas secciones se determina de acuerdo a la
difusin conveccional y longitudinal (dispersin). La cantidad de sustancia que pasa
a travs de las secciones tranversales de la columna en el tiempo ^t = t
2
t
l
se da
por la siguiente expresin
(1.29)
_
|2
|1
(in ,)[
r=r1
odt i = 1, 2,
donde , = ,(r, t) es el ujo difusional longitudinal, S es la supercie de la seccin
de la columna.
En este mismo intervalo de tiempo ^t la variacin de la cantidad de sustancia en
el volumen es igual
(1.30)
_
r2
r1
(in a)[
|=|2
odr
_
r2
r1
(in a)[
|=|1
odr
36 2. MODELACIN MATEMTICA
De (39) y (40) se desprende la ecuacin del balance de masas en forma integral
_
|2
|1
[(in ,)[
r=r1
_
|2
|1
(in ,)[
r=r2
[odt =
_
r2
r1
[(in a)[
|=|2
_
r2
r1
(in a)[
|=|1
[odr (1.31)
Si las funciones que aparecen en (41) y sus correspondientes derivadas estn denidas
y son continuas sobre el conjunto (r
l
, r
2
)(t
l
, t
2
) entonces dividiendo ambas partes
por o^t^r y luego tendiendo ^r y ^t hacia cero, obtenemos la ecuacin de balance
en forma diferencial
(1.32) (in)
r
,
r
(in a)
|
= 0
Teniendo en cuenta la ecuacin de continuidad del ujo el cual en este tiene la
forma i
r
= 0, obtenemos en forma denitiva
(1.33) in
r
in
|
a
|
= ,
r
Tanto la velocidad de sorcin de la sustancia a
|
por el sorbente como el ujo longi-
tudinal de difusin externa , que aparecen en la ecuacin deben ser dados en forma
independiente (fenomenolgicamente) a partir de razonamientos suplementarios.
El caracter de variacin de a
|
se determina de la ecuacin de la cintica. Si la veloci-
dad de variacin de la concentracin en el sorbente se determina por las condiciones
de transmisin de la masa hacia la supercie del sorbente entonces se dice que hay
difusin externa de la sorcin. En este caso se supone que la nivelacin de la con-
centracin a travs del grano ocurre de manera instntanea.
Nosotros consideraremos la ecuacin de cintica
a
|
= ,(n n
+
), (44)
donde , 0 es el coeciente cintico, n
+
es la concentracin en el ujo sobre la
supercie del grano, la cual se encuentra en equilibrio con la concentracin de la
sustancia absorbida, esto es
(1.34) a = ,(n
+
)
La relacin (45) se denomina la ecuacin de la isoterma de sorcin. En adelante
consideraremos que existe ,
l
= 1.
Igualmente con (44) consideremos tambin la ecuacin de la cintica
a
|
= (a
+
a), (1.35)
a
+
= ,(n) (1.36)
la cual condicionalmente se puede llamar difusin interna ya que en la ecuacin (46)
guran solo las concentraciones en el grano del sorbente. Aqui a
+
es la concentracin
supercial en el sorbente, la cual se encuentra en equilibrio con la concentracin de
la sustancia en el ujo.
Lo que se reere al ujo difusional longitudinal para su descripcin frecuentemente
se emplea una aproximacin basado en la ley de Fick.
(1.37) ,(r, t) = 1n
r
, 1 0.
1. MODELOS 37
El signo menos indica que la difusin tiene lugar en la direccin de concentracin
decreciente. El factor de proporcionalidad 1 se llama coeciente de difusin , que no
es estrictamente una constante porque puede depender de la concentracin. Cuando
se considera que la velocidad i es lo sucientemente grande y el proceso de difusin
longitudinal no juega un papel importante en la transmisin de masa, en este caso
se hace , = 0.
Si no se toma en cuenta ninguno de los factores cinticos, esto es a = ,(n), entonces
se obtiene un sistema de ecuaciones, el cual corresponde a la sorcin dinmica en
equilibrio.
(1.38) in
r
in
|
a
|
= 0, a = ,(n).
CORRIENTE POTENCIAL DE UN LIQUIDO, POTENCIAL DE
UNA CORRIENTE ESTACIONARIA Y DE UN CAMPO ELECTRO-
STATICO
1. Modelo de Laplace. La ecuacin de Laplace se presenta en relacin con
fuerzas gravitacionales. En los cursos de clculo de varias variables se discute el
problema de la atracin de dos cuerpos: Si una partcula de masa ' est en un
punto (r
l
, j
l
, .
l
) y otra partcula 1 de masa : se encuentra en un punto (r, j, .),
entonces atrae 1 y la fuerza gravitacional es el gradiente de la funcin escalar
n(r, j, .) =
c
r
, c = G:',
r =
_
(r r
l
)
2
(j j
l
)
2
(. .
l
)
2
esta funcin de r, j, . se llama potencial del campo gravitacional y satisface la
ecuacin de Laplace, esto es la funcin n(r) =
l
:
satisface ^n = 0 , en todas partes
excepto del punto r = 0 donde se vuelve innita.
Si consideramos a j como la densidad de masa distribuida en toda una regin
1 del espacio, entonces el potencial n en un punto (r, j, .) no ocupado por la masa
se puede escribir como
n(r, j, .) = /
___
)
r
drdj
0
d.
Salvo el factor de proporcionalidad, sta coincide con el campo de una carga
puntual c, ubicada en el origen de coordenadas. El potencial de este campo es n =
t
:
.
2. Supongamos que dentro de cierto volumen T, de frontera o , tiene lugar la
corriente estacionaria de un lquido incompresible, que se caracteriza por la veloci-
dad \ (r, j, .).
Si la corriente del lquido es irrotacional, la velocidad \ es un vector potencial,
es decir, \ = \ n siendo n una funcin escalar llamada potencial de la velocidad.
Si no hay fuentes, di\ = 0 ;por lo tanto di(\n) = 0. Es decir, el potencial de la
velocidad satisface la ecuacin de Laplace.
Las ecuaciones de maxwell un medio homogneo conductor est dada por:
\.1 =
:
, \1 = j
J1
J|
\.H = 0, \H = J -
JJ
J|
Demuestre que J y j deben satisfacer la ley de conservacin \.J
J
J|
= 0.
En un medio conductor se considera con frecuencia que la corriente J y el
campo elctrico estan relacionados, por lo tanto la ley OHM J = G.1, en donde
G es la conductividad elctrica, y se considera constante. Muestre que un medio
38 2. MODELACIN MATEMTICA
sin carga j = 0 las tres componentes de 1 y H satisfacen la ecuacin de onda
amortiguada
c
2
\
2
c = c
||
c
:
c
|
, donde c = (j-)
2
Ejemplo: Una forma vectorial dependiente del tiempo de las ecuaciones de
Maxwell para el vector de campo elctrico 1(-, t) y el vector de campo magntico
H(r, t), en un medio homogneo no conductor (J = 0) libre de fuentes (j = 0) es
a) \1 = j
J1
J|
b) \H = -
J1
J|
c) \.1 = \.H = 0
En donde la permeabilidad magntica j y la permitividad elctrica - se con-
sideran constantes.
Mostremos que las tres componentes cartesianas de 1 y de H satisfacen ecua-
ciones de onda;
Tomemos el rotacional de la ecuacin (a)
j
J
J|
(\H) = \(\1) = \.( \.1) = \
2
1 en donde \
2
es un vector cuyas
componentes cartesianas son el Laplaciano de las componentes correspondientes de
1, es decir \
2
1 = (\
2
1
l
, \
2
1
2
, \
2
1
3
); en donde 1 = (1
l
, 1
2
, 1
3
) ahora, por las
ecuaciones (b) y (c), anteriores, puede escribirse as;
c
2
\
2
1 =
J
2
J
J2
, en donde c = (j-)
1
2
La misma ecuacin vectorial puede obtenerse para H tomando primero el rota-
cional de la ecuacin (b), estas ecuaciones con ecuaciones de onda con la interesante
propiedad de que la rapidez de onda c es igual para ambas ecuaciones 1 y H.
PROBLEMAS BIEN PUESTOS Y MAL PUESTOS.
El concepto de Planteamiento Correcto de problemas matemticos fue formu-
lado por Hadamar para el analsis de diferentes problemas de la sca matemtica.
La solucin de cualquier problema consiste en la denicin del elemento . (solu-
cin del problema) dado ciertos datos de entrada, y se puede describir asi:
(1.39) . = n
donde es un operador que actua de los espacios 7 y l ( espacios lineales norma-
dos).
El problema ( ) se dice que esta BIEN PUESTO (Planteado Correctamente,
bien propuesto, bien colocado) en la pareja de espacios 7 y l si se cumplen las
siguientes condiciones:
1. Para cada n l la solucin del problema existe.
2. Para cada n l la solucin del problema es nica.
3. La solucin del problema depende continuamente de los datos de entrada
(condicin de estabilidad).
Los problemas que no satisfacen estas condiciones se denominan Problemas
Mal Puestos (Problemas Colocados No-Correctamente, Problemas Mal Plantea-
dos).
UN TIP. Por lo tanto el problema dado por la ecuacin ( ) es bien puesto siempre
y cuando en l este denido el operador
l
, el inverso de , y sea continuo en l.
1. MODELOS 39
EJEMPLO. Consideremos el siguiente ejemplo que describe la difusin de un
uido a travs de una columna lo sucientemente delgada de longitud 1.
_
a(r)n
0
(r)
_0
= )(r), 0 < r < 1 (1.40)
a(0)n
0
(0) = /
o
, a(1)n
0
(1) = /
l
(1.41)
El coeciente a(r) se llama coeciente de difusin. El problema inverso consiste en
la identicacin del coeciente de difusin a(r) a travs de la informacin suplemen-
taria sobre n(r); donde n(r) representa la concentracin del uido en el momento
r; .la funcin )(r) es una fuente externa.
CHAPTER 3
Ecuaciones Diferenciales en derivadas parciales
1. Introduccin
El desarrollo actual de las ciencias naturales est estrechamente relacionada con
la elaboracin y anlisis de modelos matemticos que describen procesos y fen-
menos. Los mtodos del modelamiento matemtico permiten resolver gran variedad
de problemas en diferentes campos de la ciencia y la tcnica. Con frecuencia para la
descripcin de un sistema se construyen MM (Modelos Matemticos) a travs de
Ecuaciones Diferenciales Ordinarias (parmetros concentrados) o bien a travs de
EDDP (Ecuaciones Diferenciales en Derivadas Parciales de parmetros distribui-
dos). Las EDDPs aparecen en diversos problemas fsicos y geomtricos, cuando las
funciones que intervienen dependen de dos o ms variables independientes. Estas
variables pueden ser el tiempo y una o ms coordenadas en el espacio. En este cap-
tulo se presentan algunas de las ecuaciones diferenciales parciales ms importantes
en las aplicaciones de la ingeniera centrndose el estudio para las EDDP lineales
de segundo orden. Se consideran mtodos para resolver problemas con valor inicial
y con valores en la frontera tanto analticos como numricos.
1.1. Algunos conceptos bsicos. Sea o un espacio vectorial (sobre K). Si
r, j, . o y `, j son escalares cualesquiera, se llama producto escalar de r e j
a r, j elemento de o o en K, si se satisfacen las siguientes condiciones:
(1) `r jj, . = `r, . jj, . .
(2) r, j = j, r.
(8) r, r 0, si r ,= 0,y r, r = 0 ==r = 0.
El espacio vectorial provisto de un producto escalar se llama un espacio pre-
hilbertiano . Veamos algunos ejemplos de conjuntos prehilbertianos:
En K
n
espacio vectorial, para r = (r
l
, r
2
, ...r
n
) e j = (j
l
, j
2
, ..., j
n
) elemen-
tos de K, la expresin r, j =
n
=l
r
.j
dene un producto escalar, que se llama
producto escalar usual en 1
n
.
En el espacio vectorial C [a, /[ (Dimensin innita), la expresin ), q =
_
b
o
)(t).q(t).dt
donde ), q C [a, /[ , dene un producto escalar. Es importante tener en cuenta
41
42 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
que una funcin ) puede ser de valor complejo sobre el intervalo ( real ) [a, /[ ; esto
es )(t) se puede expresar como )(t) = )
l
(t) )
2
(t)i para t [a, /[ , donde )
l
y )
2
son funciones de valores reales (La funcin de valores complejos ) es continua si )
l
y )
2
son continuas); en este caso el producto interior se dene ), q =
_
b
o
)(t). q(t)d
Definicin 1. Dado un espacio vectorial o se dice que un operador x |x|de
o en K, es una norma en o si para todo escalar c y para cualesquiera x, y
elementos de o se tiene:
(
l
) |x| _ 0
(
2
) |x| = 0 =x = 0
(
3
) |cx| = [c[ |x|
(
d
) |x y| _ |x| |y| (Desigualdad triangular).
Un espacio vectorial provisto de una norma se llama espacio normado.
El espacio vectorial R
n
con las operaciones suma (+) (.) usuales, proveemos la
norma usual la cual se encuentra denida por
|x| = |(r
l
, r
2
, ..., r
n
)| =
_
n
I=l
r
2
I
_1
2
=
_
r
2
l
r
2
2
... r
2
n
para todo x 1
n
, con x = (r
l
, r
2
, ..., r
n
). Un hecho importante de los temas
tratados anteriormente es la norma proveniente del producto escalar la cual se
encuentra denida por
|x| = (r, r)
1
2
Teorema. Sea o un espacio prehilbertiano, entonces la expresin |x| =
(r, r)
1
2
con r o dene una norma en o.
(
l
) Sea r o, claramente r ,= 0 r = 0.
Si r ,= 0, se tiene r, r 0 por ser o un espacio prehilbertiano
luego |x| = (r, r)
1
2
0 por denicin se toma el valor positivo de la raz.
Si r = 0, se tiene |x| = (r, r)
1
2
= (0, 0)
1
2
= 0.
Por la tanto de lo anterior se tiene que |x| _ 0 para todo r o.
(
2
) De esta parte de la demostracin falta demostrar que si |r| = 0, entonces
r = 0.
Si tenemos que |r| = 0, por denicin se tiene (r, r)
1
2
= 0.
r, r = 0, luego r = 0 por ser o un espacio prehilbertiano.
(
3
) Sea ` cualquier escalar, entonces
|`r| = (`r, `r)
1
2
=
_
`
2
r, r
_
1
2
= [`[ (r, r)
1
2
= [`[ |r| .
(
d
) Para demostrar la desigualdad del tringulo (
d
) es necesario recurrir a
la desigualdad de Schwarz ([r, j[ _ |r| |j|). Claramente Io r, j _ [r, j[
y de la desigualdad de Schwarz se tiene [r, j[ _ |r| |j| luego de lo anterior se
tiene que Io r, j _ |r| |j| .
|r j|
2
= r j, r j
= |r|
2
r, j j, r |j|
2
= |r|
2
2 Io r, j |j|
2
_ |r|
2
2 |r| |j| |j|
2
= (|r| |j|)
2
.
1. INTRODUCCIN 43
y por lo tanto |r j|
2
_ (|r| |j|)
2
de lo que se tiene |x y| _ |x| |y|
terminando la demostracin del teorema.
La estructura del espacio de prehilbertiano, aunque rica , no permite tratar
ciertos problemas de anlisis en los cuales hay que recurrir a sucesiones. Para ello
veremos a continuacin otros conceptos que permiten enriquecer la estructura de
espacios prehilbertianos.
Sea X un espacio normado. Una sucesin r
n
de elementos de A se llama
una sucesin de Cauchy, si para todo - 0, existe un entero positivo tal que
|r
n
r
n
| < - para todo :, : _ .
Por otra parte, un subconjunto o de A se dice que es completo, si para toda
sucesin de Cauchy r
n
de elementos r
n
o, existe un elemento r o tal que
lim|r
n
r| = 0. En otras palabras, o es completo si toda sucecin de Cauchy
en o converge a un elemento perteneciente a o. Un espacio normado completo se
llama espacio de Banach.
Teniendo en cuenta que un espacio prehilbertiano es un espacio normado es
natural dar la siguiente denicin.
Definicin 2. El espacio prehilbertiano completo A se llama espacio de
Hilbert. En otras palabras que un espacio prehilbertiano sea un espacio de Hilbert
signica, que como espacio normado es un espacio de Banach.
Ejemplo. En el espacio euclidiano 1
n
= R
n
, toda sucesin de Cauchy es
convergente, lo que implica que 1
n
es un espacio de Hilbert.
En un espacio normado todo subespacio de dimensin nita es completo.
Todo espacio normado (prehilbertiano) de dimensin nita es un espacio de
Banach (de Hilbert).
1.2. Clasicacin de la EDP.
Definicin 3. Se llama ecuacin en derivadas parciales con : variables in-
dependientes r = (r
l
, r
2
, r
3
, ...., r
n
), a una relacin entre la funcin incgnita
n(r
l
, r
2
, r
3
, ...., r
n
) y a sus derivadas parciales. O sea
(1.1) 1(r
l
, r
2
, r
3
, ...., r
n
,
0u
0x
l
, ....,
0u
0x
n
, ...
0
l
u
0x
l
l1
.....0x
n
ln
) = 0
donde /
l
/
2
.... /
n
= /.
El orden superior de la derivada parcial de la relacin (1) se llama orden de la
ecuacin diferencial en derivadas parciales. Por ejemplo :
1(r, j, n,
0u
0x
,
0u
0y
) = 0 tiene orden uno
0
2
u
0x
2
0
2
u
0y
2
)(r, j) = 0 tiene orden dos
Las ecuaciones de segundo orden aparecen con frecuencia en los fenmenos fsi-
cos, es por esto que las estudiaremos con ms detenimiento.
Una ecuacin de segundo orden con dos variables independientes es una relacin
de la forma :
44 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
1(r, j, n,
0u
0x
,
0u
0y
,
0
2
n
0r
2
,
0
2
u
0y
2
,
0
2
u
0x0y
) = 0
donde r, j son variables independientes.
La ecuacin diferencial (1) se llama lineal con respecto a las derivadas de mayor
orden, si sta tiene la forma :
(1.2)
n
I,=l
a
I
(r)
0
2
u
0x
I
0x
]
1(A, l,
0u
0x
l
, ...,
0u
0x
n
) = 0
donde r = (r
l
, r
2
, r
3
, ...., r
n
) y se llama lineal si se puede escribir como :
(1.3)
n
I,=l
a
I
(r)
0
2
u
0x
I
0x
]
n
I=l
a
I
(r)
0u
0x
I
/(r)n = )(r)
PRELIMINARES SOBRE ECUACIONES DIFERENCIALES EN DERIVADAS
PARCIALES
Se llama ecuacin en derivadas parciales con : variables independientes r = (r
l
,
r
2
, r
3
, ...., r
n
), a una relacin entre la funcin incgnita n(r
l
, r
2
, r
3
, ...., r
n
) y a
sus derivadas parciales. O sea
(1.4) 1(r
l
, r
2
, r
3
, ...., r
n
,
0u
0x
l
, ....,
0u
0x
n
, ...
0
l
u
0x
l
l1
.....0x
n
ln
) = 0
donde /
l
/
2
.... /
n
= /.
El orden superior de la derivada parcial de la relacin (1) se llama orden de la
ecuacin diferencial en derivadas parciales. Por ejemplo :
(1.5) 1(r, j, n,
0u
0x
,
0u
0y
) = 0
Investiguemos un poco sobre la solucin de la EDP de primer orden (2). Supngase
que la funcin 1(r, j, j
l
, j
2
) es diferenciable respecto a las variables j
l
, j
2
en cierto
conjunto G del espacio de variables r, j, n, j
l
, j
2
y en este conjunto
2
I=l
_
01
0j
I
_
,= 0
La ecuacin diferencial
(1.6)
n
I=l
a
I
(r
l
, r
2
, ..., r
n
, n)
0n
0r
I
= /(r
l
, r
2
, ..., r
n
, n)
se denomina cuasi-lineal. Si en la EDP (3) los coecientes no dependen de n, en-
tonces la ecuacin se llama poli-lineal.
La ecuacin (3) puede ser escrita como
(1.7) (a, \n) = /,
1. INTRODUCCIN 45
donde \n es el gradiente de n, y (., .) denota el producto escalar entre los vectores
a = (a
l
(r
l
, r
2
, ..., r
n
, n), ..., a
n
(r
l
, r
2
, ..., r
n
, n)) y \n. Reescribiendo (3)
(1.8)
_
a
[a[
, \n
_
=
/
[a[
,
la expresin es la derivada direccional de la funcin n respecto al vector a. Por lo
tanto, la solucin de la EDP ser una funcin n cuya derivada en la direccin del
vector a(r, n) en cada punto r es igual
/
[a[
.
1.3. Concepto de Caractersticas de una EDP. Consideremos la EDP
cuaislineal
(1.9)
n
I=l
a
I
(r
l
, r
2
, ..., r
n
, n)
0n
0r
I
= /(r
l
, r
2
, ..., r
n
, n)
y sean las funciones a
I
(x, n), i = 1, 2, ..:, /(x, n) pertenecientes a la clase C
l
en
cierta regin abierta G del espacio de variables x, n y
n
I=l
a
2
(x, n) ,= 0
Supngase que la solucin n(x) esta denida en cierta regin 1 del espacio de
variables x; sea x = x() una curva que se encuentra en 1. Entonces, considerando
la solucin sobre esta curva, obtenemos la funcin l(t) = n(x()). Elijamos la
curva x = x() de tal manera que su vector tangente
dx
dt
en cada punto sea igual
a a(x,l()), por consiguiente debe cumplirse las ecuaciones
dr
I
dt
= a
I
(x,l()), i = 1, 2, ..:
diferenciando la funcin l(t) tenemos
dl
dt
=
n
I=l
0n
0r
I
(x(t).
dr
I
dt
=
n
I=l
0n
0r
I
(x(t).a
I
(r
l
(t), r
2
(t), ..., r
n
(t), l(t)) = /((x(t), l(t));
la ltima igualdad tiene lugar debido aq ue n(x) es solucin de (3).
Por consiguiente, la curva buscada x = x() en espacio x debe ser tal que las
ecuaciones
x = x(), n = l(t)
denan una trayectoria del sistema de EDO
dr
I
dt
= a
I
(x, u), i = 1, 2, ..:
dn
dt
= /(r, n) (1.10)
El sistema (6) recibe el nombre de sistema de caractersticas de la ED (3) y su
trayectoria en el espacio de variables x,n ecuaciones de las caractersticas de la ED
(3).
46 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Ejemplo. Para la ecuacin lineal
0n
0r
l
0n
0r
2
= 0
el sistema de caractersticas tiene la forma
dr
l
dt
= 1,
dr
2
dt
= 1,
dn
dt
= 0
Por lo tanto, las caractersticas en este caso son lineas
r
l
= t c
l
,
r
2
= t c
2
, n = c
Consideremos ahora la ecuacin cuasilineal
0n
0r
l
n
0n
0r
2
= 0
el sistema de caractersticas tiene la forma
dr
l
dt
= 1,
dr
2
dt
= n,
dn
dt
= 0
Integrando tenemos
r
l
= t c
l
,
r
2
= ct c
2
, n = c.
Las caractersticas forman una familia de lneas paralelas a los planos r
l
, r
2
.
El problema de Cauchy pra una EDP de primer orden consiste: consideremos
la ED
(1.11)
n
I=l
a
I
(r
l
, r
2
, ..., r
n
, n)
0n
0r
I
= /(r
l
, r
2
, ..., r
n
, n)
Sea o: x = (t
l
, t
2
, ..t
nl
) una supercie regular de dimensin : 1 de clase
C
l
; ( una supercie se denomina regular de clase C
l
si, las funciones
0
0t
|
(/ =
1, 2, ..: 1) son continuas y para cada valores jos (t
l
, t
2
, ..t
nl
) los vectores
0
0t
|
(/ = 1, 2, ..: 1) son linealmente independientes) sin interesecciones consigo
misma en el espacio de varaibles r
l
, r
2
, ..r
n
. Sobre la supercie o se dene la
funcin n
o
(t
l
, t
2
, ..t
nl
). Entonces de debe determinar (hallar) una funcin n(r)
que satisfaga la ED (7) y que satisfaga la condicin inicial
(1.12) n((t
l
, t
2
, ..t
nl
)) = n
o
(t
l
, t
2
, ..t
nl
)
Consideremos el sigueinte ejemplo.
Ejemplo. Resolver el problema de Cuachy
r
0n
0r
n
2j
0n
0j
= n, (j 0) (ec.10)
n(r, j) = j, o : r j = 1 (1.13)
1. INTRODUCCIN 47
Eligiendo t
l
= :, escribimos la lnea o de la forma r = :1, j = :; y las ecuaciones
r = : 1, j = :, n = : (condicin inicial) determinan una curva en espacio r, j, n.
Por lo tanto, el problema de Cuachy consiste en buscar una supercie integral
n = n(r, j) de la ecuacin (10) que pase a travs de la curva incial dada
(1.14) r = : 1, j = :, n = :
. Ahora puede demostrarse que cualquier caracterstica de la ecuacin (3) que pase
a travs de cualquier punto de o se encuentra en la supercie integral buscada
n = n(r, j).As que pasaremos a travs de cada punto de la supercie o las car-
actersticas de la ecuacin (10). Tomaremos el parmetro t en las caractersticas
de tal manera que para t = 0 pase por los puntos de la supercie o. Para nuestro
ejemplo tenemosel sistema de caractersticas tiene la forma
dr
dt
= r,
dj
dt
=
n
2j
,
dn
dt
= n
resolviendo, tenemos
(1.15) r = c
l
c
r
, j =
_
cc
r
c
2
, n = cc
r
La supercie integral que da la solucin del problema de Cauchy (10)-(11) esta
formado por trozos de caractersticas que pasan para t = 0 por la curva inicial
(12). Haciendo en (13) t = 0 y empleando (12) obtenemos las sigueintes relaciones
c
l
= 1 :,
_
c c
2
= :, c = :
de aqu c
2
= :
2
:. Reemplzando en (13) los valores de c
l
, c
2
obtenemos las solucin
del problema de Cauchy dada en la sigueinte forma parametrica
(1.16) r = (1 :)c
r
, j =
_
:c
r
:
2
:, n = :c
r
Despejando los parmetros :, t de (14) tenemos
(1.17) n =
j
2
1 r
Es facil ver por simple reemplazo que la funcin (16) satisface el problema de Cauchy
(10)-(11).
1.4. Ecuaciones diferenciales parciales de segundo orden. En el do-
minio :-dimensional 1 examinemos una ecuacin diferencial lineal de segundo or-
den en derivadas parciales,
(1.18)
n
I,=l
a
I
(r)
0
2
u
0x
I
0x
]
n
I=l
a
I
(r)
0u
0x
I
/(r)n = )(r)
donde los coecientes a
I
(r), i, , = 1, 2, ..., : son funciones de valores reales; la ma-
triz (r) = |a
I
(r)|, i, , = 1, 2, ..., : se considera simtrica, ya que es una matriz
asociada a una forma cuadrtica, y sus valores propios son reales con correspondi-
entes vectores propios mutuamente ortogonales;
48 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Sea r
o
un punto que pertenece al dominio de denicin de la ecuacin (4). Eval-
uemos la matriz en el punto r
o
. Asociemos a la ecuacin (4) la siguiente forma
cuadrtica,
Q(j
l
, j
2
, ...j
n
) =
n
I,=l
a
I,
j
I
j
asi que = (r
o
) es simetrica y sus valores propios son reales con correspondientes
vectores propios mutuamente ortogonales (en caso contrario usamos el proceso de
Gramm-Schmidt). Esta forma cuadrtica Q se puede llevar a la forma cannica a
travs de una transformacin lineal no singular. De este modo, los coecientes de
la parte principal de la ecuacin varan en forma anloga a los coecientes de una
forma cuadrtica bajo una transformacin lineal. Designemos con :
= :
(r
0
)
el nmero de valores propios (`(r
0
)) positivos en un punto arbitrario r
0
1;
:
= :
(r
0
) el nmero de valores propios negativos en r
0
y :
0
= :
0
(r
0
) el nmero
de valores propios nulos en r
0
.
La ecuacin (4) se denomina ecuacin de tipo elptico en r
0
si :
= : :
= :.
Una ecuacin se llama elptica en el conjunto 1, si es elptica en todo punto de 1.
La ecuacin de Poisson :
n
r1r1
n
r2r2
= )(r
l
, r
2
),
donde n
r1r1
denota
0
2
n
0r
2
l
; es un ejemplo de este tipo de ecuaciones. Denotaremos
de ahora en adelante la suma n
r1r1
n
r2r2
como ^n.
La ecuacin (4) se denomina hiperblica en Ar 1, si :
= : 1, :
= 1
:
= : 1, :
= 1; y es hiperblica en 1, si lo es en todo punto de 1.
Por ejemplo :
0
2
n
0r
2
l
0
2
n
0r
2
2
0
2
n
0r
2
3
= )(r
l
, r
2
, r
3
)
La ecuacin (4) se denomina parablica en el punto r
0
1, si :
0
0; y es
parablica en 1, si lo es en todo punto de 1. Por ejemplo,
0
2
n
0r
2
l
0
2
n
0r
2
2
0n
0r
3
= )(r
l
, r
2
, r
3
)
No necesariamente la ecuacin es del mismo tipo en todos los puntos del dominio.
Veamos ahora la forma de llevar una EDP a una forma mas simple, llamada forma
cannica. Sea r = (r
0l
, r
02
, ..., r
0n
) un punto de 1. Designemos mediante n = n(r)
(n
I
= n
I
(r
l
, r
2
, ...., r
n
), i = 1, 2, ...., :) una transformacin que aplica cierta vecin-
dad l(r
0
) en la vecindad \ (n
0
), donde n
0
= n(r
0
) y mediante r = r
l
(n) la
transformacin inversa. La matriz Jacobiana J(r) = |
0n
I
0r
I
| es una matriz invert-
ible, esto es [J(r)[ , = 0.
Designemos la funcin n(r
l
(n)) por n(n).
De la regla de la cadena,
n
r1
=
n
|=l
n
u
!
n
|r1
=
n
|=l
0u
0w
l
0w
l
0x
I
1. INTRODUCCIN 49
n
r1r
=
n
|,s=l
0
2
u
0w
l
0w
s
0w
l
0x
I
0w
s
0x
]
n
|=l
0u
0w
l
0
2
w
l
0x
I
0x
]
Despus del cambio de variable la ecuacin (4) toma la forma :
(1.19)
n
|,s=l
a
|s
[r
l
(n)[n
u
!
us
= 1(r
l
(n), n, \(n))
donde
a
|s
=
n
I,=l
a
I
(r)
0w
l
0x
I
0w
s
0x
]
,
y 1 es una funcin que no depende de las segundas derivadas de n. Consideremos
la forma cuadrtica
n
I,=l
a
o
I
j
I
j
cuyos coecientes son iguales a los coecientes a
I
(r
o
) = a
o
I
. Haciendo sobre las
varaibles j la tarsnformacin lineal
j
I
=
n
I,|=l
a
I|
.
|
se obtiene una nueva forma cuadrtica
n
|,l=l
a
o
|l
.
|
.
l
donde a
o
|l
es igual a
n
I,=l
a
o
I
j
I|
j
l
. por tanto, los coecientes de la parte prin-
cipal de la ecuacin varan en forma anloga a los coecientes de una forma
cuadrtica bajo una transformacin lineal. As, las matrices
y estn ligadas por
= CC
+
, ambas matrices tendrn igual nmero de valores propios positivos, neg-
ativos y nulos [GROSMANN]. Esto signica que en todo punto j \ , la ecuacin
(5) tendr el mismo tipo de la ecuacin (4). De esta forma la clasicacin de las
ecuaciones de segundo orden es invariable respecto a las transformaciones suaves
biunvocas no singulares (la matriz inversa existe) de las variables independientes.
Esta circunstancia la aprovechamos para simplicar la ecuacin (4 ).
Ejemplo 1. Llevar a la forma cannica la siguiente ecuacin :
n
rr
2n
r
2n
4n
:
n
::
= 0
A esta ecuacin le corresponde la forma cuadrtica
Q = j
2
l
2j
l
j
2
2j
2
2
4j
2
j
3
j
2
3
Si tomamos la tranformacin lineal
n
l
= j
l
j
2
, n
2
= j
2
2j
3
, n
3
= j
3
j
l
= n
l
j
2
= n
l
n
2
2n
3
n
2
= j
2
2n
3
=
j
2
= n
2
2n
3
50 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
obtenemos la siguiente forma cuadrtica en su forma cannica Q = n
2
l
n
2
2
n
2
3
.
Por lo tanto la transformacin lineal no singular con matriz
_
_
1 1 2
0 1 2
0 0 1
_
_
lleva a la forma Q a su forma cannica Q = n
2
l
n
2
2
n
2
3
. La matriz no singular
que lleva a la ecuacin diferencial a su forma cannica, es la matriz C
l
,
_
_
1 1 0
0 1 2
0 0 1
_
_
y la correspondiente transformacin
= r j, j = j 2., 0 = .
Empleando esta transformacin y representando n(r, j, .) = (, j, 0), encontramos
n
rr
=
qq
4
00
2
q
4
0
4
00
,
n
=
0q
qq
4
00
4
q0
, n
::
=
00
4
0q
n
r
=
qq
4
00
2
q
2
4
q0
,
n
:
= 2
00
q0
Reemplazando las anteriores representaciones para las derivadas en la ecuacin
original, obtenemos
qq
00
= 0.
De esta manera, si la ecuacin diferencial orriginal pertenece a cierto tipo en
un punto r
o
, la ecuacin la podemos, en este punto, reducir a la forma cannica
correspondiente. Es de anotar que para : _ 8 la ecuacin (4) solo se puede reducir
a la forma cannica en una vecindad del punto r
o
. Si los coecientes de la ecuacin
(4) son constantes, al reducir la ecuacin a su forma cannica en un punto r
o
,
obtenemos una ecuacin reducida a la forma cannica en toda la regin de deni-
cin de la ecuacin.
Definicin 4. Supngase que la funcin j(r), r = (r
l
, r
2
, ...r
n
) (: _ 2) es de
clase C
l
es tal que la supercie j(r) = 0, el gradiente \j(r) ,= 0 y
(1.20)
n
I,=l
a
I,
0j
0r
I
0j
0r
= 0
A la supercie j(r) se le llama supercie caracterstica de a ecuacin (5), y la
ecuacin (7) se llama ecuacin caracterstica.
Supongamos, que cada supercie de la familia j(r) c = 0, a < c < /, es una
caracterstica de la ecuacin (5). Ya que sobre cada caracterstica el \j(r) ,= 0
entonces esta familia llena cierta regin G (lo sucientemente pequea) a travs
de cada punto pasa una solo y solo una caracterstica. Supngase que j C
2
(G),
entonces si hacemos n
l
(r) = j(r), entonces el coeciente a
l,l
= 0 en la regin G.
Ahora si nosotros conocieramos /(/ _ :) caractersticas (familias de caractersticas)
1. INTRODUCCIN 51
j
l
(r) = c
l
, j
2
(r) = c
2
,...,j
|
(r) = c
|
tales que ra:q(
0j
(r)
0r
I
) = /, r G, entonces
en la regin G tendriamos a
l,l
, a
2,2
,.... a
|,|
= 0.
Es de anotar que para el caso : = 2 podemos determinar las caractersticas de tal
manera que se puede determinar el tipo en toda uan regin:
Escribamos la ecuacin (4) de la siguiente manera :
(1.21) (r, j)
0
2
u
0x
2
21(r, j)
0
2
u
0x0y
C(r, j)
0
2
u
0y
2
1
l
(r, j, n, n
r
, n
) = 0
Introduzcamos la suguiente transformacin :
0 = ,(r, j) j = c(r, j)
Lo anterior lo podemos escribir en trminos de la transformacin T de la forma
T(r, j) = (0, j), T(r, j) = (,(r, j), c(r, j))
supnagse que T admite inversa , esto es
J(0, j)
J((r, j)
,= 0.
Es natural plantearse la pregunta Cmo escoger 0, j, de modo que la ecuacin en
estas variables tenga una forma ms sencilla?
El primer paso consiste en transformar las derivadas a las nuevas variables 0, j.
Al encontrar las derivadas n
r
, n
, n
rr
, .. en funcin de n
0
, n
q
, n
00
, n
q0
, n
qq
y sustituir
en la ecuacin (8), tenemos :
0
2
u
00
2
2
1
0
2
u
000j
C
0
2
u
0j
2
1(0, j,
0u
00
,
0u
0j
, n) = 0
donde:
(0, j) =
_
00
0x
_
2
21
00
0x
00
0y
C
_
00
0y
_
2
(1.22)
1(0, j) =
00
0x
0j
0x
1
_
00
0x
0j
0y
00
0y
0j
0x
_
C
00
0y
0j
0y
C(0, j) =
_
0j
0x
_
2
21
0j
0x
0j
0y
C
_
0j
0y
_
2
Ahora es facil ver que se cumple la siguiente igualdad
1
2
C = (1
2
C)
_
00
0r
0j
0j
00
0j
0j
0r
_
2
De aqu vemos que la transformacin T no cambia el tipo de ecuacin. Escojamos
las variables 0, j de modo que se cumpla una y solo una de las condiciones siguientes
:
1.
= 0,
C = 0
2.
= 0,
1 = 0
8.
=
C,
1 = 0
52 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Consideremos la ecuacin
(1.23) 7
2
r
217
r
7
C7
2
= 0
Observe que esta ecuacin es idntica a las ecuaciones (7). Sea 7 = ,(r, j), alguna
solucin particular de (9). Si hacemos 0 = ,(r, j), entonces
= 0. De esta manera
el problema citado sobre la eleccin de las nuevas variables independientes est
ligado con la solucin de (9).
Podemos demostrar que si:
1. Si 7 = ,(r, j) es una solucin particular de la ecuacin (9), la relacin
,(r, j) = C es una integral general de la ecuacin diferencial ordinaria.
(1.24) (dj)
2
21drdj C(dr)
2
= 0
2. Si ,(r, j) = C es una integral general de la ecuacin (10), la funcin 7 =
,(r, j) satisface la ecuacin (9).
La ecuacin (10) se llama ecuacin caracterstica para la ecuacin (8). Las
integrales de (10) se denominan integrales caractersticas.
La ecuacin (10) se divide en dos ecuaciones :
oy
ox
=
L
_
(L
2
AC)
A
oy
ox
=
L
_
(L
2
AC)
A
(1.25)
El signo de la expresin subradical determina el tipo de la ecuacin (8). Si en el
punto (r
0
, j
0
) :
1
2
C 0 La ecuacin es de tipo hiperblico
1
2
C < 0 La ecuacin es de tipo elptico
1
2
C = 0 La ecuacin es de tipo parablico
En adelante consideraremos regiones tales que en todos sus puntos la ecuacin tenga
el mismo tipo.
Para la ecuacin de tipo hiperblico 1
2
C 0, (10) tiene dos soluciones reales y
diferentes : ,(r, j) = C y c(r, j) = C, determinan familias reales de caractersticas.
Haciendo 0 = ,(r, j) , j = c(r, j) , reducimos la ecuacin (8), despus de dividir
entre el coeciente de n
0q
, a la forma :
n
0q
= 1(0, j, n, n
q
, n
0
)
esta es la llamada forma cannica de las ecuaciones de tipo hiperblico.
A menudo se utiliza la segunda forma cannica; si hacemos :
0 = c , j = c ,
0 j
2
= c
0 j
2
= ,
La ecuacin diferencial se transforma en n
oo
n
oo
= 1
l
.
Para las ecuaciones de tipo elptico 1
2
C < 0; la solucin de (11) es una funcin
compleja. Sea ,(r, j) = ,
l
(r, j)i,
2
(r, j) una solucin particular de (9). Tomemos
1. INTRODUCCIN 53
la siguiente transformacin 0 = ,
l
(r, j), j = ,
2
(r, j), no es difcil demostrar que
J(,
l
, ,
2
)
J(x, y)
,= 0.
As que,
[
0,
0x
[
2
21
0,
0x
0,
0y
C[
0,
0y
[
2
= 0
[
00
0x
[
2
210
r
0
C[
00
0y
[
2
= [
0j
0x
[
2
21j
r
j
C
_
j
2
reemplazando , en esta ecuacin e igualando la parte real e imaginaria a cero,
obtenemos
0 = 0
r
j
1(0
r
j
j
r
) C0
(recordemos que l i\ = 0 si solo si l = 0,\ = 0).
Luego
=
C,
1 = 0.
La ecuacin (8) toma la forma
0
2
u
00
2
0
2
u
0j
2
= 1
3
.
La ecuacin de tipo parablico 1
2
C = 0 , tiene solo una solucin ,(r, j) = C, as
si hacemos 0 = ,(r, j), y tomamos a j = c(r, j) siendo c una funcin independiente
de ,. Por lo tanto podemos escribir que
= (
_
+ 0
r
_
C + 0
)
2
= 0 , puesto
que 1 =
_
_
C, de aqu podemos ver que :
1 = (
_
+ 0
r
_
C + 0
)(
_
+ j
r
_
C + j
) = 0
entonces (8) toma la forma n
qq
= 1.
Ejemplo 3
n
rr
2 sinr n
r
cos
2
r n
cos r n
= 0
De la ecuacin determinamos = 1, 1 = sinr, C = (co:r)
2
, por lo tanto
1
2
C = sin
2
r co:
2
r = 1 0. As que nuestra ecuacin es de tipo hiper-
blico. Encontremos el cambio de variable. Resolviendo la ecuacin diferencial (11)
encontramos :
oy
ox
=
sinx 1
1
= 1 sinx
oy
ox
= 1 sin x
Por lo tanto
r j cos r = C
l
r j cos r = C
2
Haciendo,
0 = r j cos r j = r j cos r.
54 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Luego n
rr
2 sinr n
r
cos
2
r n
cos r n
= 0 se transforma en
0
2
u
000j
= 0
Si,
0 = c , j = c ,,
la ecuacin diferencial anterior se convierte en :
0
2
u
0c
2
0
2
u
0,
2
= 0.
Ejercicio
Llevar a la forma cannica la ecuacin :
r
2
0
2
u
0x
2
j
2
0
2
u
0y
2
= 0
Tenemos = r
2
, 1 = 0 , C = j
2
, 1
2
C = r
2
j
2
0; la ecuacin es de tipo
hiperblico, con ecuacin caracterstica r
2
dj
2
j
2
dr
2
= 0 la cual se divide en dos
ecuaciones diferenciales rdj jdr = 0 , y, rdj jdr = 0, con soluciones :
1:j 1:r = 1:C y 1:j 1:r = 1:C
rj = C ,
r
= C Introduzcamos nuevas variables 0 = rj , j =
j
r
Reemplazando,
0
2
u
0x
2
=
0
2
u
00
2
j
2
2
0
2
u
000j
(
j
2
r
2
)
0
2
u
0j
2
y
2
x
d
2
0u
0j
j
r
3
0
2
u
0y
2
= r
2
0
2
u
00
2
2
0
2
u
000j
1
r
2
0
2
u
0j
2
Obtenemos :
r
2
(
0
2
u
00
2
j
2
2
0
2
u
000j
j
2
r
2
0
2
u
0j
2
y
2
x
d
2
0u
0j
j
r
3
) j
2
(r
2
0
2
u
00
2
2
0
2
u
000j
1
r
2
0
2
u
0j
2
) = 0
Simplicando,
4
0
2
u
000j
j
2
2
j
r
0u
0j
= 0
0
2
u
000j
1
2
0u
0j
1
rj
= 0
0
2
u
000j
1
20
0u
0j
= 0
Ejercicio
Llevar a la forma cannica la ecuacin :
0
2
u
0
2
x
sin
2
r 2j sinr
0
2
u
0x0y
j
2
0
2
u
0y
2
= 0
= (sinr)
2
, 1 = j sinr, C = j
2
,
1. INTRODUCCIN 55
Asi que 1
2
C = 0.
La ecuacin es de tipo parablico, con ecuacin caracterstica
(sin2r)
2
(dj)
2
2j sinrdrdj j
2
(dr)
2
= 0
(sinrdj jdr)
2
= 0
cuya solucin es :
1:j 1:(lan
r
2
) = 1:C
j lan
r
2
= C
Sea 0 = j lan(r,2), j = j (funcin arbitraria tal que
J(0, j)
J(A, 1 )
,= 0 )
Al evaluar,
0
2
u
0x
2
,
0
2
u
0x0y
,
0
2
u
0y
2
y reemplazar en la ecuacin se obtiene :
j
0
2
u
0j
2
=
0u
00
sinr
Ahora :
sinr =
2 lan(x,2)
1 lan
2
(x,2)
, lan(r,2) =
0
j
sinr =
20j
0
2
j
2
y
j
0
2
u
0j
2
=
0u
00
20n
0
2
j
2
Ejercicio
Llevar a la forma cannica la ecuacin :
0
2
u
0x
2
2
0
2
u
0x0y
2
0
2
u
0y
2
= 0
1
2
C = 1 < 0
o sea la ecuacin es de tipo elptico, con ecuacin caracterstica j
t2
2j
t
2 = 0.
Resolviendo, (j
t
)
2
2j
t
2 = 0 obtenemos,
j r ir = C
l
, j r ir = C
2
Si 0 = j r , j = r, evaluamos
0
2
u
0x
2
,
0
2
u
0x0y
,
0
2
u
0y
2
y la llevamos a la ecuacin,
0
2
u
00
2
2
0
2
u
000j
0
2
u
0j
2
2
0
2
u
00
2
2
0
2
u
000j
2
0
2
u
00
2
= 0
56 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
de donde:
0
2
u
00
2
0
2
u
0j
2
= 0
1.5. Problema de Cauchy. Sea
(1.26)
0
2
n
0t
2
=
n
I,=l
a
I
0
2
u
0x
I
0x
]
n
I=l
a
I,o
0
2
u
0x
I
0l
1(r, t, n, \
r
n, n
|
)
Sea o = [t = o(r)[ una supercie suave a trozos y sean las funciones n
o
, y n
l
dadas sobre o (datos de Cauchy). El problema de Cauchy consiste en encontrar la
solucin de ( ) para t o(r) y
(1.27) n
S
= n
o
0n
0:
= n
l
Una pregunta que surge es: existe algn problema si la funcin o(r) es una de las
caractersticas de ( ).
Supongamos que o C
2
y en ningun punto es tangencial con las caractersticas
de ( ), esto es
a
o,o
= 1
n
I,
a
I,
0o
0r
I
0o
0r
I=0
a
n
I,o
0o
0r
I
,= 0
Transformemos el problema ( )-( ) y demos las condiciones en el plano t = 0. Para
esto tomemos el cambio de variable t = t o(r), entonces n(r, t) = n(r, t o(r)).
En una vecindad de la supercie o la ecuacin ( ) toma la forma
0
2
n
0t
2
=
1
a
o,o
n
I,=l
a
I
0
2
u
0x
I
0x
]
1
a
o,o
n
I=l
a
I,o
0
2
u
0x
I
0l
1(r, t, n, \
r
n, n
|
)
La supercie o se transforma bajo esta operacin en el plano t = 0, y las condiciones
de frontera para t = 0 son
n[
r=0
= n[
S
= n
o
(r)
0 u
0t
[
r=0
=
0u
0l
[
S
as que nos queda por determinar
0u
0l
sobre o.
Bien n
o
(r) = n(r, o(r)), derivando esta expresin respecto a r
I
, obtenemos :
0u
o
0x
I
=
0u
0x
I
0u
0l
0o
0x
I
Derivando la funcin n(r, t) respecto a la normal : = (
l
.
,
l
.
\o) donde ^ =
_
1 [\o[
2
, si tenemos presente tambin la segunda condicin inicial del problema
original, obtenemos otra relacin mas sobre o.
1. INTRODUCCIN 57
n
l
=
0u
0l
1
^
1
^
n
I=l
0u
0x
I
0o
0x
I
(1.28)
0u
0n
[
S
= n
l
(1.29)
El sistema de ecuaciones algebraicas ( ),( ) respecto a
Ju
Jxi
i = 1, 2, ..:,
Ju
Ji
tiene
solucin en cada punto de la supercie o, ya que su determinante es diferente de
cero, (1)
n
^ ,= 0.
EJERCICIOS
Llevar a la forma cannica las siguientes ecuaciones , de tal forma que se conserve
el tipo de ecuacin.
1. n
rr
2n
r
n
82nl = 0
2. (1 r
2
)
2
n
rr
n
2r(1 r
2
)n
r
= 0
3. j
2
n
rr
2rjn
r
r
2
n
= 0
4. (1 r
2
)n
rr
(1 j
2
)n
rn
r
n
2n = 0
5. n
rr
2 sinrn
r
(cos r)
2
n
co:rn
= 0
6. n
rr
rjn
= 0
7. n
rr
2n
r
2n
4n
:
n
::
= 0
8. n
rr
4n
r
2n
r:
4n
n
::
8n
r
= 0
9. n
rr
2n
r
8n
2n
r
6n
= 0
10. j
J
2
J
2
r
J
2
J
2
= 0
Consideremos ahora el caso de un sistema de ecuaciones diferenciales cuasilin-
eales de primer orden. Sea
(1.30)
0u
0l
0u
0x
= /
donde n(r, t) = n
l
(r, t), ..., n
n
(r, t) es cierta funcin vectorial formada por :
funciones incognitas, = a
I,
(r, t, n), i, , = 1, 2, ..., : es una matriz de orden : y
/ = /
l
(r, t, n), ..., /
n
(r, t, n) la funcin del lado derecho. La cuasilinealidad tiene
lugar debido a que tanto la matriz como el vector / dependen de la solucin n.
El sistema de ecuaciones (16) se llama hiperblico en cierta regin del espacio r, t, n
si en toda la regin los valores propios `
l
, ..., `
n
son reales y diferentes.
Supngase que el sistema es hiperblico. Multipliquemos el sistema anterior por el
vector propio |
(|)
correspondiente al valor propio `
|
, asi que tenemos :
|
(|)
0u
0l
|
(|)
0u
0x
= |
(|)
/
|
(|)
(
0u
0l
`
|
0u0u) = |
(|)
/ = )
|
/ = 1, 2, . . . , : (1.31)
La expresin que se encuentra entre el parntesis de ( ) es la derivada a travs de
la linea que se da por la ecuacin
dr
dt
= `
|
/ = 1, 2, ..., :
58 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Expresemos esta situacin con la ayuda de la siguiente representacin
(
0
0l
`
|
00x) = (
d
dt
)
|
Las lineas denidas por las ecuaciones ( ) se denominan caractersticas. La ecua-
ciones que se obtienen despues de transformar el sistema original se puede escribir
de la forma :
|
(|)
(
dn
dt
)
|
= )
|
, / = 1, 2, ..., :.
Esta ltima relacin se conoce como la forma cannica del sistema de ecuaciones.
Su particularidad consiste en que la derivacin en cada una de las ecuaciones se
lleva a cabo solo a travs de una caracterstica.
1.6. Problema de Cauchy para la ecuacin de Dalambert. Aplique-
mos el mtodo de Dalambert al problema
0
2
u
0l
2
= a
2
0
2
u
0x
2
, < r < t 0 (1.32)
n(r, 0) = ,(r);
0n
0t
(r, 0) = c(r), r + (1.33)
Si ,(r) y c(r) C
2
(+) as que n(r, t) C
2
Es de anotar que ,(r), c(r) pueden ser no derivables e incluso discontinuas.
Entonces n(r, t) ser una funcin discontinua. (Esta funcin discontinua satisface
la ecuacin ( ) en un sentido mas general).
Hagamos el cambio de variable en la ecuacin diferencial ( ):
= r at; j = r at.
La ecuacin (22) se convierte en
(1.34)
0
2
n
00j
= 0.
Para resolver ( ) representemos
0n
0j
(, j) = (, j).
Entonces ( ) se escribe en la forma
0
0
=
d
d
([
q
= constante) = 0
De aqu se desprende que
[
q
= constante
no depende de esto es (, j) = C(j).
Esto es
d
dj
(n[
=constante
) = C(j)
1. INTRODUCCIN 59
Integrando esta ecuacin diferencial ordinaria, obtenemos
n[
=constante
=
_
C(j)dj c
l
()
As que
n = q(j) )()
Donde ) y q son ciertas funciones de una sola variable. Por otro lado las funciones
de la forma ( ) satisfacen la ecuacin ( ) para cualesquiera ) y q. Realizando el
cambio de variable inverso tenemos que
(1.35) n(r, t) = )(r at) q(r at)
La grca de la funcin )(r at) representa una onda, la cual viaja a la derecha a
travs del eje Or con velocidad a y la funcin q(rat) es una onda mvil (viajera)
a la izquierda (desplazada) con la misma velocidad. Esto signica que la grca de
la funciones )(rat), (q(rat)) para cualquier t 0 como funcin de r se obtiene
de la grca de la funcin )(r)(q(r)) con la ayuda de una traslacin paralela a la
derecha (izquierda) a travs del eje Or en at.
As que la forma de la grca de la funcin )(r at) como funcin de r para
diferentes t jos, es una misma. Estas funciones en fsica se llaman ONDAS VI-
AJERAS. Por lo tanto el desarrollo de Dalambert es simplemente la suma ( en
fsica se dice que es la superposicin, la interferencia) de dos ondas viajeras.
Teniendo en cuenta las condiciones iniciales obtenemos
)(r) q(r) = ,(r) (1.36)
)
t
(r)(a) q
t
(r)a = c r + (1.37)
Integrando la ecuacin ( )
(1.38) )(r) q(r) =
1
a
_
r
0
c(:)d:
c
a
Sumando esta ecuacin con ( ) y dividendo por dos obtenemos
(1.39) q(r) =
1
2
,(r)
1
2a
_
r
0
c(:)d:
c
2a
y de la misma manera restando ( ) de ( ) obtenemos:
)(r) =
1
2
,(r)
1
2a
_
r
0
c(:)d:
c
2a
1
2
,(r)
1
2a
_
0
r
c(:)d:
c
2a
Reeemplazando estas expresiones en ( ) obtenemos la frmula de Dalambert
(1.40) n(r, t) =
,(r at) ,(r at)
2
1
2
_
ro|
ro|
c(:)d:
60 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
1.7. Caractersticas. Para la solucin de los dos problemas anteriores las
lneas rat = co::t juegan un papel importante. Estas ecuaciones como se discutio
arriba reciben el nombre de caractersticas de la ecuacin ( ). Las caractersticas
r at = co::t para la ecuacin de Dalambert (es una familia de rectas).
Llamaremos la recta r at = co::t caracterstica que viaja a la derecha (con
velocidad a). Estas son lneas de nivel de la onda )(r at). Entre mayor sea la
velocidad a menor ser el ngulo de la pendiente de la caracterstica que se forma
con el eje Or. Anlogamente, las rectas r at = co::t se llaman caractersticas
viajeras a la izquierda. Ellas son lneas de nivel para la onda q(r at).
Abaajo se muestra una familia de caractersticas cuando a = 2
t =
r
2
-5 -4 -3 -2 -1 1 2 3 4 5
-2
-1
1
2
3
4
5
x
t
Caractersticas r at = co::t
Entre mayor es la velocidad de onda a, menor es el angulo de la pendiente de la
caracterstica con el eje or (escalando los dos ejes Or y Ot) teenmos
lanc =
1
a
Veamos un ejemplo: tomemos como parmetros de entrada a = 1,c(r) = 0.
,(r) =
_
r si 0 _ r < 1
2 r si 1 _ r _ 2
1. INTRODUCCIN 61
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
x
y
n(r, t) =
1
2
,(r t)
1
2
,(r t)
Resulta que n es la superposicin de dos ondas; cada una de ellas corresponde
en la posicin inicial a la mitad de la forma de onda ,(r) y se propagan respecti-
vamente con velocidades 1 y -1.
1
2
,(r t) =
_
l
2
(r t) 0 _ (r t) _ 1
l
2
(2 r t) 1 _ (r t) _ 2
1
2
,(r t) =
_
l
2
(r t) 0 _ (r t) _ 1
l
2
(2 r t) 1 _ (r t) _ 2
Para t
l
= 1.
l
2
,(rt) =
_
l
2
(r 1) si 1 _ r < 2
l
2
(2 r 1) si 2 _ r _ 8
_
l
2
(r 1) si 1 _ r < 0
l
2
(2 r 1) si 0 _ r _ 1
62 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
-1.0 -0.5 0.0 0.5 1.0 1.5 2.0 2.5 3.0
0.1
0.2
0.3
0.4
0.5
x
y
Hacer las gracas de las funciones n(r, 2).
SOLUCIONES DISCONTINUAS
Tomemos en calidad de )(r) la funcin discontinua
_
0 si r < 2
1 si r _ 2
-5 -4 -3 -2 -1 0 1 2 3 4 5
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
x
y
Grca )(r)
)(r) =
_
0 :i r < 2
1 :i r _ 2
n(r, t) = )(r at) =
_
0 :i r at < 2
1 :i r at _ 2
1. INTRODUCCIN 63
Es una funcin discontinua a travs de la caracterstica r at = 2.
Entonces la funcin, tomando a = 2,
_
0 si r < 8
1 si r _ 8
-5 -4 -3 -2 -1 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
1
2
3
4
5
6
7
8
x
y
Ejercicio. Hacer las gracas de las funciones n(r, 1), n(r, 2).
Por lo tanto podemos concluir que la solucin de la ecuacin de Dlambert
puede ser discontinua. Las discontinuidades se propagan a travs de las caracters-
ticas.
COMENTARIOS
1. Las soluciones discontinuas n(r, t) de la ecuacin de Dalambert para una
cuerda o resorte no tienen sentido fsico, sin embargo la presin j(r, t) de un gas
dentro de un tubo delgado satisface esta misma ecuacin. La funcin j(r, t) puede
ser discontinua. Las soluciones discontinuas de la ecuacin de onda en la dinmica
de gases se llaman ONDAS DE CHOQUE.
2. Se puede tomar una funcin suave )
t
(r) que cambia rapidamente de 0 a 1
en el intervalo (2, 2 c), c 0. Entonces la funcin )
t
(r at) ser solucin en el
sentido clsico de la ecuacin de Dalambert, la cual cambia rapidamente de 0 a 1
alrededor de los puntos de la caracterstica r at = 2.
Regin de Dependencia de la solucin. Qu sera necesario saber para
poder calcular la solucin n del problema
0
2
n
0t
2
= a
2
0
2
n
0r
2
, < r < , t 0
n(r, 0) = ,(r),
0n
0t
(r, 0) = c(r), r +
64 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
en el punto (r
0
, t
0
).
De la frmula de Dalambert
n(r, t) =
,(r at) ,(r at)
2
1
2a
_
ro|
ro|
c(:)d:
De aqu vemos que es necesario conocer el valor de ,(r) en los puntos r
0
at
0
=
r
l
, r
0
at
0
= r
2
y el valor de la velocidad inicial en el segmento [r
l
, r
2
[, conocer
,(r) y c(r) fuera del segmento [r
0
at
0
, r
0
at
0
[ no es necesario; por esto el
segmento [r
0
at
0
, r
0
at
0
[ se denomina REGION DE DEPENDENCIA DEL
PROBLEMA DE CAUCHY ( ) - ( ) en el punto (r
0
, t
0
)
Tambien podemos ahora decir exactamente cuando una cuerda se puede considerar
de longitud innita; si el punto considerado r
o
se encuentra a una distancia mayor
que at
o
de los extremos de la cuerda.
Para la construccin de la regin de dependencia de la solucin se procede de
la siguiente forma: a partir de (r
o
, t
o
) se trazan dos caractersticas de la ecuacin
de Dalambert hasta que corten con el eje Or. El conjunto de puntos r
o
at
o
y
r at
o
que se forman de la interseccin de las caractersticas con el eje Or y el
segmento de recta entre estos dos puntos es la regin de dependencia.
ONDAS PLANAS, CARACTERISTICA, DISCONTINUIDADES
Consideremos el anlogo de la ecuacin de Dalambert para la EDP
(1.41)
0
2
n
0t
2
=
0
2
n
0r
2
l
0
2
n
0r
2
2
0
2
n
0r
2
3
, t 0, r = (r
l
, r
2
, r
3
)
A esta ecuacin la satisface la presin del viento j(r, t); onda sonora en la acstica;
los potenciales ,(r, t) de un campo electromagntico y el potencial (r, t) de un
campo electrodinmico.
Buscaremos la solucin del ( ) en la forma
(1.42) n(r, t) = )(
o
t
l
r
l
2
r
2
3
r
3
) = )(
o
t , r)
donde , r =
l
r
l
2
r
2
3
r
3
. La funcin dada por ( ) se llama onda plana, y
esto esta ligado con lo siguiente:
a. Cuando se ja t = t
o
la supercie de nivel n(r, t
o
) = co::t son planos
(1.43)
o
t , r = c
perpendiculares al vector ;
b. para diferentes valores de t = t
o
, t
l
la funcin n(r, t
l
) se diferencia de n(r, t
o
)
en un desplazamiento respecto al vector
(1.44)
[[
2
o
(t
l
t
o
).
donde [[
2
=
2
l
2
2
2
3
. Veamos porque la expresin ( ) es una onda viajera,
n(r
[[
2
o
(t
l
t
o
), t
o
) = )(
o
t
_
, r
[[
2
o
(t
l
t
o
)
_
) =
= )(
o
t < , r
< ,
[[
2
o
(t
l
t
o
)) = )(
o
t
l
, r) = n(r, t
l
).
Por tanto, ( ) es una onda que viaja a tarvs del vector direccin con
velocidad
=
o
[[
2. PROBLEMA DE BUSQUEDADE VALORES Y VECTORES PROPIOS 65
Representemos el vector unitario en la direccin a tarvs de n =
[[
. Entonces,
o
= [[; = n[[ y pot lo tanto, la ecuacin ( ) s epuede escribir de la forma
n(r, t) = )([[t n, r [[) = )(t n, r [[) = q(t n, r)
donde
-
2. Problema de busquedade valores y vectores propios
2.0.1. Teora de STURM-LIOUVILLE. Denicin :Sea j C
t
([0, 1[) ,
C([0,1[) , j(r) 0 , (r) _ 0 , se llama problema regular de Sturm-Liouville al
problema de la obtencin de valores propios ` de tal manera que haya soluciones
no triviales n(r) del operador diferencial 1, donde 1 ctua sobre la funcin por la
siguiente regla:
1n = (jn
t
)
t
n.
con condiciones de frontera:
/
l
n(0) /
2
n
t
(0) = 0, /
l
/
2
0 (2.1)
H
l
n(1) H
2
n
t
(1) = 0, H
l
H
2
0 (2.2)
La regin de denicin 1(1) del operador 1 consta de funciones n(r) de la clase
C
2
(0, 1) C
l
([0, 1[), n
00
(r) integrable al cuadrado (puede ser incluso en el sentido
de Lesbegue); ademas satisfacen las condiciones (2)
El problema de encontrar valores ( valores propios del opeardor 1), para los
cuales la ecuacin
(2.3) 1n = `n
tiene solucin no trivial en la regin de dencin 1(1) (las soluciones se llaman
funciones propias correspondientes a los valores propios) se llama Problema de
Sturm- Liouville.
En algunos casos las condciones de frontera tienen la forma:
c
l
n(0) c
2
n
t
(0) ,
l
n(1) ,
2
n
t
(1) = 0
c
3
n(0) c
d
n
t
(0) ,
3
n(1) ,
d
n
t
(1) = 0
Si ,
l
= ,
2
= c
3
= c
d
= 0 entonces tenemos el caso anteriormente descrito y
se dice que las condiciones en la frontera son separadas.
si c
l
= ,
2
= c
3
= ,
3
= 0 , c
l
= 1 , ,
l
= 1 ,c
d
= 1 , ,
d
= 1 tenemos
condiciones de frontera peridicas n(0) = n(1), n
t
(0) = n
t
(1).
EJERCICIO. Para que ` = 0 sea un valor propio del operador 1 es necesario y
suciente que (r) = 0, H
l
= /
l
= 0 ; y para este valor propio le corresponde una
funcin propia constante.
En estos momentos hagamos una pequea disgregacin en nuestra exposicin
para recordar ciertos conceptos bsicos para el desarrollo del presente tema.
66 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
2.0.2. Tipos de convergencia. Concepto de sucesin funcional y de serie
funcional. Dado un conjunto jo de puntos r y para todo nmero : de una serie
natural de nmeros 1,2,...,n,... se pone en correspondencia, de acuerdo con una
ley determinada, cierta funcin )
n
(r) denida sobre el conjunto r, entonces el
conjunto de funciones enumeradas )
l
(r), )
2
(r), ...,)
n
(r),... se denomina sucesin
funcional.
Se llama serie funcional a la suma formalmente escrita,
(2.4)
o
n=l
)
n
(r) = )
l
(r) )
2
(r) ... )
n
(r) ...
de un nmero innitos de trminos de la sucesin funcional )
n
(r).
Supongamos que una sucesin funcional (o una serie) esta denida sobre el
conjunto r. Fijemos un punto arbitrario r
o
, perteneciente al conjunto r, y
examinemos todos los trminos de la sucesin (o serie) en el punto r
o
. Obtendremos
en este caso una sucesin nmerica (o una serie nmerica).
Si la citada sucesin nmerica ( o la serie) converge, suele decirse que la sucesin
funcional (o serie) converge en el punto r
o
. El conjunto de todos los puntos r
o
, donde
converge la sucesin funcional dada (o serie) se denomina dominio de convergencia
de la sucesin funcional.
En diversos casos concretos el dominio de convergencia puede o bien coincidir
con el domino de denicin r, o bien constituir una parte del dominio de deni-
cin, o bien ser, en general, un conjunto vaco.
Supongamos que una sucesin funcional )
n
(r) tiene dominio de convergencia
r. Una totalidad de los lmites, tomados para todos los valores de r del conjun-
to r forma una funcin bien denida )(r) que tambin esta denida sobre el
conjunto r. Esta funcin se denomina funcin lmite de la sucesin )
n
(r).
Denicin . Se dice que la sucesin funcional )
l
(r), )
2
(r), ..., )
n
(r), ... con-
verge uniformemente hacia )(r) sobre el conjunto r, si para todo c 0, existe
(c) tal que con : _ (c) para todo r del conjunto r se cumple
(2.5) [)
n
(r) )(r)[ < c
En esta denicin resulta importante el hecho de que el nmero depende slo de
c y no depende de r. De este modo, para cualquier c 0 existe un nmero universal
(c), a partir del cual la desigualdad ( ) queda vlida simultneamente para todos
los r del conjunto r.
Denicin. Una serie funcional se llama uniformemente convergente sobre el
conjunto r hacia su suma o(r), si la sucesin o
n
(r) =
n
I=l
)
I
(r) de sus sumas
parciales converge uniformemente sobre el conjunto r hacia la funcin lmite o(r).
Convergencia en media cuadrtica
Denicin.Sea la sucesin funcional
)
l
(r), )
2
(r), ..., )
n
(r), ...
denidas en el intervalo (a, /). Se dice que la serie funcional
o
n=l
)
n
(r) converge
en el sentido de media cuadrtica hacia la funcin )(r) si
lim
o
_
b
o
[)(r)
n=l
)
n
(r)[
2
dr = 0
2. PROBLEMA DE BUSQUEDADE VALORES Y VECTORES PROPIOS 67
Es de anotar que si una sucesin )
n
(r) converge hacia la funcin )(r) de manera
uniforme en el segmento [a, /[, entonces )
n
(r)tambien converger en media sobre
el segmento [a, /[.
Proposicin. Si una sucesin )
n
(r) converge en media hacia la funcin )(r)
en el segmento [a, /[, dicha sucesin puede integrarse trmino a trmino sobre [a, /[,
es decir, el lmite
lim
no
_
b
o
)
n
(r)dr
existe y es igual a la integral
_
b
o
)(r)dr.
2.0.3. Propiedades del operador diferencial 1
. 1. Se dice que el operador 1 es un operador positivo si se cumple la frmula
< 1n, n =
_
l
0
1n.ndr _ 0; para toda funcin n 1(1) llamado regin de
denicin del operador 1;, la derivada de la funcin n es integrable al cuadrado y
n satisface las condiciones de frontera ( ), ( ).
De la frmula de integracin por partes tenemos:
< 1n, n =
_
l
0
[j(r)[n
t
(r)[
2
[n(r)[
2
[dr
/
l
/
2
j(0)[n(0)[
2
H
l
H
2
[n(1)[
2
Observando que la parte de la derecha de ( ) es positiva concluimos que <
1n, n _ 0 , por tal razn 1 es un operador positivo.
2.L es simtrico; recordemos que un operador se llama simtrico si: n, 1[[
, 1[n[ = 0; para todo n, que pertenecen a cierto conjunto 1 llamado regin de
denicin del opeardor 1.
Inicialmente veamos que la siguiente frmula es vlida: n1[[ 1[n[ =
J
Jr
(j\ [n, [) , donde \ [n, [ = nnes el wronskiano de n y .
Veamos n1[[ 1[n[ = n[(j)[ [(jn)n[
= n(j)n (jn)n
= n(j)n(j) (jn) (jn)
= [n(jn)[[ (jn)[
= [j (nn)[
=
J
Jr
[j\ [n, [[
Por lo tanto, al integrar la identidad n1[[ 1[n[ =
J
Jr
[j\ [n, [[ obtenemos
la siguiente ecuacin llamada frmula de Green.
Sean n y funciones con segundas derivadas continuas en el intervalo [a, /[ .Entonces,
b
_
o
(n1[[ 1[n[) (r) dr = (j\ [n, [) (r) [
b
o
si ademas n y satisfacen las condiciones de frontera, por ejemplo n(a) =
n(/) = (a) = (/) = 0, la frmual de Green se simplica a
b
_
o
(n1[[ 1[n[) (r) dr = 0 ; por consiguiente el operador 1 es simtrico.
3. Existe un nmero innito contable de valores propios reales positivos (1 es
simtrico positivo) con funciones propias correspondientes n
n
(r) .
68 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
4. Las funciones propias normalizadas n
n
(r) forman un conjunto ortonormal,
o sea
_
l
0
n
n
(r)n
n
(r)dr = 0, :i : ,= :
A continuacin probamos esta propiedad para el caso n(0) = n(1) = 0.
Sean `
n
, `
n
dos valores propios con funciones propias correspondientes n
n
,
n
n
tales que
(jn
t
n
)
t
n
n
`
n
n
n
= 0, n
n
(0) = n
n
(1) = 0
(jn
t
n
)
t
n
n
`
n
n
n
= 0, n
n
(0) = n
n
(1) = 0
multipliquemos la primera ecuacin interiormente (respecto al producto interior)
por n
n
y la segunda por n
n
; tomando luego la diferencia obtenemos
(`
n
`
n
) < n
n
, n
n
=
_
l
0
[n
n
(jn
t
n
)
t
n
n
(jn
t
n
)
t
[dr
Integrando dos veces por partes la expresin de la derecha se puede ver que
esta expresin se hace igual a cero. De esta forma (`
n
`
n
) < n
n
, n
n
= 0, y si
`
n
,= `
n
, entonces < n
n
, n
n
= 0.
5. Si ) est denida sobre [0,1] y es cuadrtica integrable, entonces )(r) tiene
un desarrollo en serie de Fourier en trminos de las funciones propias n
n
, de la
forma
(2.6) )(r) =
o
n=l
a
n
n
n
(r)
donde
(2.7) a
n
=
1
|n
n
|
2
_
l
0
n
n
(r))(r)dr , : = 1, 2, ...
La serie ( ) converge en el sentido de la media cuadrtica, es decir
lim
o
_
l
0
[)(r)
n=l
a
n
n
n
[
2
dr = 0
Si las funciones ) y )
t
son cuadrticas integrables, la serie
a
n
n
n
converge
uniformemente y absolutamente a )(r) en cualquier intervalo de continuidad de ).
Si ) tiene una discontinuidad de salto en r = r
t
, entonces en r = r
t
la serie de
Fourier de f converge a 1,2[)(r
t
) )(r
t
)[
EJEMPLOS
1. Encontrar los valores propios y sus correspondientes funciones propias del
operador 1 que acta sobre n por la regla 1n = n", sujeta a las condiciones de
contorno n(0) = 0, n(1) = 0. El dominio del operador 1 es 1(1) = n : n
tt
(r)
C[0, 1[, n(0) = 0, n(1) = 0.
2. PROBLEMA DE BUSQUEDADE VALORES Y VECTORES PROPIOS 69
Solucin:
Tenemos :
n" = `n = 0 n(0) = n(1) = 0
Resolviendo la ecuacin diferencial para los casos: ` < 0 , ` 0, ` = 0,
obtenemos el siguiente conjunto de soluciones respectivamente,
n = c
l
c
_
Xr
c
2
c
_
Xr
, ` < 0 (2.8)
n(r) = c
l
sin(
_
`r) c
2
cos(
_
`r), ` 0 (2.9)
n = C
l
r C
2
, ` = 0 (2.10)
para ` < 0,tenemos n(0) = c
l
c
2
= 0; n(1) = c
l
c
_
X
c
2
c
_
X
= 0.
Este sistema tendr soluciones no triviales si y slo si el determinante del sistema
es igual a cero, esto es c
_
X
c
_
X
= 0, el cual se cumple solo si ` = 0, pero
estamos considerando que ` < 0; luego c
l
= c
2
= 0 y n(r) = 0.
De la misma forma se puede concluir que si ` = 0 , n(r) = 0.
Consideremos ahora el caso cuando ` 0; de las condiciones de frontera: n(0) =
c
2
= 0, y para r = 1 tenemos n(1) = c
l
sin(
_
`) = 0, y como buscamos soluciones
no triviales, c
l
,= 0, y sin(
_
`) = 0, para ` = (:)
2
, : = 1, 2, 8...
De esta forma `
n
= (:)
2
nos da el conjunto de valores propios. Reem-
plazando en ( ) para ` 0 , obtenemos las funciones propias n
n
(r) = c
n
sin(:r),
haciendo c
n
= 1, el conjunto n
n
(r) = sin(:r) satisface la ecuacin diferencial y
las condiciones de frontera; adems las funciones son ortogonales entre s, o sea
_
l
0
sin(:r) sin(:r)dr = 0 si : ,= :.
2. Resolver
1n = `n <=== n" `n = 0
n(0) = 0, n(1) n
t
(1) = 0
Con las condiciones de fronteras dadas n(r) = 0 para ` _ 0.
Para ` 0 , n(0) = c
2
= 0 y para el otro extremo r = 1 tenemos
n(1) n
t
(1) = ta:
_
` =
_
`,
esta es una ecuacin trascendental con un nmero innito de soluciones (hacer una
grca de j = ta:
_
` y q =
_
`).
Denotando
_
` = c
n
, sus funciones propias son n
n
= sin(c
n
r).
3. Obtener el desarrollo en serie de Fourier de la funcin
)(r) =
_
r 0 _ r _ 1,2
r 1 1,2 _ r _ 1
_
En trminos del conjunto de funciones propias del ejemplo (1).
Solucin :
Dado que `
n
= (:)
2
, n
n
= sin(:r),
(2.11) )(r) =
o
n=l
a
n
sin(:r)
70 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
donde
a
n
=
1
[[ sin(:r)[[
2
_
l
0
)(r) sin(:r)dr
=
1
[[ sin(:r)[[
2
[
_
l/2
0
rsin(:r)dr
_
l
l/2
(r 1) sin(:r)dr[
Sea la ED
2
(r)j
"
l
(r)j
0
(r)j `j(r)j(r) = 0 si hacemos j =
1
2
oxp(
_
l
(r)
2
(r)
dr) = j = j
2
; = j
0,
r = jj entonces podemos es-
cribir la ED en la forma; (jj
t
)
t
j `rj = 0. Observe que se necesita que los
coecientes sean continuos y
2
(r) no sea igual a cero.
Ahora el proposito es encontrar un desarrollo en trminos de funciones propias
para una solucin del problema regular no homogneo de Sturm-Liouville con val-
ores en la frontera
1[j[ jrj = ) (2.12)
a
l
j(a) a
2
j
t
(a) = 0, /
l
j(/) /
2
j
t
(/) = 0, (2.13)
j es un real jo y 1[j[ := (jj
t
)
t
j.
Sean `
n
n=l
valores propios con funciones propias correspondientes c
n
n=l
para el problema homogneo de valores propiso asociado a ()-(), con j en vez del
parmetro `; es decir, 1[j
n
[ `
n
rj
n
= 0, donde j
n
satisface las condiciones de
frontera
Sea c(r) =
o
n=l
c
n
j
n
(r); j
n
(r) es un sistema ortogonal con respecto a la funcin
de ponderacin r que queremos determinar con coecientes c
n
de modo que c sea
la solucin de ( )-( )
1(c) jrc =
o
n=l
(j `:)c
n
j
n
, si expresamos ) como el producto r(),r) en
un desarrollo mediante funciones propias
),r =
r
n
j
n
; r
n
=
b
_
o
()|r)j
n
rdr
b
_
o
j
2
n
rdr
=
b
_
o
)j
n
dr
b
_
o
j
2
n
rdr
entonces el lado derecho de ( ) se convierte en r
r
n
j
n
. Al igualar los lados
izquierdo y derecho de ( )
r
(j`
n
)c
n
j
n
= r
r
n
j
n
como r 0, tenemos
[(j `
n
)c
n
r
n
[ j
n
= 0.
La suma de este desarrollo es igual a cero si y solo si todos los coecientes se
anulan
(2.14) [(j `
n
)c
n
r
n
[ = 0
por lo tanto c
n
=
:r
Xr
si j ,= `
n
\: as que c =
o
n=l
r
n
j `
n
j
n
. Nos referimos
a c como la nica solucin, pues si j ,= `
n
, para cada : = 1, 2, .. la ecuacin
homognea correspondiente slo tiene la solucin trivial y por lo tanto el problema
no homogneo con valores en la frontera tiene una nica solucin.
2. PROBLEMA DE BUSQUEDADE VALORES Y VECTORES PROPIOS 71
EJEMPLO. Determinar un desarrollo en trminos de funciones propias para la
solucin del problema regulra de Sturm-Liouville con valores en la frontera
j
00
8j = sin 8r 2 sin8r; j(0) = 0, j() = 0.
El problema
1[j[ = j
00
= `j, j(0) = 0, j() = 0
tiene valores propios `
n
= :
2
, con funciones propias j
n
= sin:r; : = 1, 2, .. En
este caso r = 1, de modo que ),r =
r
n
j
n
= sin(8r) 2 sin8r; por lo tanto,
c =
o
n=l
r
n
j `
n
j
n
=
6
sin8r
2
61
sin8r
Si j = `
n
para algn Cal sera la solucin en este caso? Entonces de ( )
= 0. Teniendo dos posibilidades:
1. Si
,= 0 tenemos una contradiccin y entonces la ecuacin no homognea
no tiene una solucin que pueda expresarse mediante un desarrollo con funciones
propias. Si
= 0, entonces no hay restricciones sobre c
. As, se obtiene una
familia de un parmetro de soluciones del problema no homogneo (c
parmetro)
72 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
EJERCICIO
1. Calcular los valores propios y las funciones propias para los siguientes prob-
lemas de Sturm-Lioville :
a. 8r
2
j
"
4rj 6j `j = 0, r 0
b. j" `j = 0 , j(0) = j(2) , j
t
(0) = j
t
(2)
c. j" `j = 0 , j
t
(0) = j(1) = 0
d. j
(
4) `j = 0 , j(0) = j(1) = j
t
(0) = j
t
(1) = 0
e.
l
r
J
Jr
(r
J
Jr
) `j
|
2
r
2
j = 0
j(0) acotada, j(1) = 0
f.
l
sIn 0
J
J0
(sin0
Ju
J0
) `
n
2
sIn
2
0
n = 0
j(0) = j() acotadas.
g. Resolver e) cuando : = 0.
2. Obtngase los desarrollos en serie de Fourier para la funcin )(r) = r(1r
2
)
, 0 _ r _ 1 ; relativos a los siguientes conjuntos de funciones propias :
a. Las funciones propias del (desarrollo) problema
j" `j = 0 ; j
t
(0) = j
t
(1) = 0.
b. j" `j = 0 ; j(0) = j(1), j
t
(0) = j
t
(1)
J
Jr
_
j(r)
Jr
J
_
(r)j `r(r)j = 0 a < r < /
a
l
j(a) a
2
j
t
(a) = 0
/
l
j(/) /
2
j
t
(/) = 0
Cuando j(r), (r) y r(r) son continuas en [a, /[ y j(r) 0 y r(r) 0 en [a, /[,
nos referimos a este sistema como un problema regular de Sturm-Liouville.
La ecuacin es singular cuando las hiptesis sobre j, j
t
, y r solo son validas
en el intervalo abierto (a, /) y no en el intervalo cerrado; si j se anula en a o en
/ y si j(r), (r) o r(r) no estn acotadas cuando r tiende a a o a /; o cuando el
intervalo (a, /) no est acotado
J
Jr
_
r
Jr
J
_
`rj = 0 0 < r < /
lim
r0
+ j(r) y lim
r0
+ j
t
(r) existen y son nitos j(/) = 0
existen otros tipos de condiciones de frontera, llamadas condiciones peridicas
en la frontera
j(0) = j(j), j
t
(0) = j
t
(0) = j
t
(j) ; j es el periodo.
Ejemplo:
j
tt
`j = 0
j(0) = 0
8j() j
t
() = 0
2. PROBLEMA DE BUSQUEDADE VALORES Y VECTORES PROPIOS 73
2.0.4. Funcin de Green. Consideremos el siguiente problema:
1(n(r)) =
d
dr
_
j (r)
dn
dr
_
(r) n(r) = ) (r) ; a _ r _ /, (2.15)
a
l
n(a) a
2
n(a) = 0; /
l
n(/) /
2
n(/) = 0 (2.16)
donde j (r) C
l
[a, /[ ; (r) C [a, /[ con j (r) 0 en [a, /[ . Supongamos
que ) (r) C [a, /[ ,aunque esta condicin no es necesaria; adems que el problema
homogneo ) (r) = 0 tiene una solucin trivial o sea ` = 0 no es un valor propio.
La solucin del problema ()-() se puede dar mediante la frmula
n(r) =
b
_
o
G(r, :) ) (:) d:.
Donde G(r, :) se llama funcin de Green , usaremos variacin de parmetros
para hallar la solucin de () () ; sean .
l
y .
2
soluciones no triviales de 1[n[ = 0;
y .
l
satisface la condicin () , .
2
satisface la condicin () .
Busquemos la solucin () de la forma n(r) = c
l
(r) .
l
(r) c
2
(r) .
2
(r), obte-
niendo el siguiente sistema de ED para c
l
(r) y c
2
(r) :
c
l
(r) =
) (r)
j (r)
.
2
(r)
\ [.
l,
.
2
[
c
2
(r) =
) (r)
j (r)
.
l
(r)
\ [.
l,
.
2
[
donde \ [.
l,
.
2
[ es el wronskiano de .
l,
.
2
. Integrando c
l
(r) y c
2
(r) de
r a / y de a a r respectivamente
c
l
(r) =
o
_
r
) (:) .
2
(:)
j (:) \ [.
l,
.
2
[
d:
c
2
(r) =
r
_
o
) (:) .1 (:)
j (:) \ [.
l,
.
2
[
d:
Por lo tanto, escribimos a n(r) as:
n(r) =
_
b
_
r
.
2
(:) ) (:)
j (:) \ [.
l,
.
2
[
d:
_
.1 (r)
_
r
_
o
.
l
(:) ) (:)
j (:) \ [.
l,
.
2
[
d:
_
.
2
(r) =
b
_
o
G(r, :) ) (:) d:
donde
G(r, :) =
_
_
.
l
(:) .
2
(r)
j (:) \ [.
l,
.
2
[ (:)
, a _ : _ r
.
l
(r) .
2
(:)
j (:) \ [.
l,
.
2
[ (:)
r _ : _ /
como .
l
y .
2
satisfacen la ecuacin 1[n[ = 0 podemos hacer ver que
j (r) \ [.
l,
.
2
[ (r) = C, r [a, /[
en donde C es una constante y \ [.
l,
.
2
[ (:) = cc
R
(|)J|
es una representacin
del wronskiano de dos soluciones .
l
y .
2
de la ecuacin nj (r) n (r) n = 0 en
[a, /[ llamada la identidad de Abel.
74 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
as G(r, :) =
_
_
.
l
(:) .
2
(r)
C
, a _ : _ r
.
l
(r) .
2
(:)
C
r _ : _ /
es la funcin de Green para el problema () () .
TEOREMA:
Sea G(r, :) la funcin de Green para el problema () () entonces la funcin
n(r) =
b
_
o
G(r, :) ) (:) d:.
es solucin del problema () (); para cualquier funcin ) (r) [a, /[ .
El problema de valor de forntera
1n = `n ),
donde ) C(a, /) e integrable al cuadrado, entonces si ` = 0, no es un valor propio
del operador 1 con regin de denicin 1(1) es equivalente a la ecuacin integral
n(r) = `
b
_
o
G(r, :) n(:) d:
b
_
o
G(r, :) ) (:) d:
Problema de valor de frontera para la ecuacin de tipo elptico.
Ahora consideremos el problema de bsqueda de valores propios para el caso n-
dimensional. Sea G +
n
una regin acotada con frontera suave ( o suave a trozos)
o.
Veamos el siguiente problema:
di(j\n) n = `n, r G (2.17)
cn ,
0n
0:
[
S
= 0 (2.18)
Supongamos que j C
l
(G), C(G), j(r) 0, c(r) 0, ,(r) _ 0, c(r)
,(r) 0, para r o es la frontera de G..
El problema consiste en encontrar una funcin n(r) que pertenezca a C
2
(G)
C
l
(G)
y satisfaga la ecuacin ( ) en la regin G, y las condiciones de contorno ( ) en o.
Cuando n(r) = 0, no representa inters, entonces el problema consiste en encontrar
los valores propios del operador:
1n = di(j\n) n = `n
cn ,
0n
0:
[
S
= 0,
y las funciones 1n se supone son integrables al cuadrado.
Representemos por 1
J
la regin de denicin del operador 1 que consiste en
el conjunto de funciones )(r) que pertenecen a la clase C
2
(G) C
l
(G), satisfacen
las condiciones de frontera ( ) y la condicin que 1) es integrable al cuadrado.
Frmulas de Green
2. PROBLEMA DE BUSQUEDADE VALORES Y VECTORES PROPIOS 75
Sea G (+
n
) una regin acotada y o su frontera suave. Sea n C
2
(G), denamos
el operador 1 de la siguiente forma
1n = di(j\n ).
Sea C
l
(G), as que
_
c
1ndr =
_
c
[di(j\n) n[dr
Empleando la frmula de OSTROGRADSKI-GAUSS
En lo que sigue necesitamos la frmula de integracin por partes.
_
c
n
rI
dr =
_
c
n
rI
_
Jc
n cos
rI
d:; donde 0G es la frontera de G suave
o suave a trozos, c
I
es el ngulo entre la normal externa a 0G y el eje or
I
.
la frmula admite extensin para el caso de un dominio cilndrico Q
0
= G
[0, T[ .
_
Q
C
n
rI
drdt =
_
Q
C
n
rI
drdt
T
_
0
_
c
n cos
rI
d:dt.
_ _
S
(1 cos c Qcos , 1cos )d: =
_ _ _
\
(
01
0r
0Q
0j
01
0.
)drdjd.
donde cos c,cos ,, cos , son los cosenos directores de la normal : exterior a la
supercie o, as que:
(2.19)
_
c
1ndr =
_
c
j
n
I=l
0v
0x
I
0u
0x
I
dr
_
S
j
0u
0n
d:
_
c
ndr
donde
0u
0n
= (\n, :)
La frmula ( ) se conoce como la primera frmula de Green. Adems,
(2.20)
_
c
(1n n1)dr =
_
c
j(n
0v
0n
0u
0n
)d:)
la cual se conoce como la segunda frmula de Green. Para su comprobacin, por
la primera frmula de Green encontramos
_
c
1ndr y luego hacemos la diferencia
entre
_
c
1ndr y
_
c
n1dr
En particular si j = 1, = 0, entonces:
_
c
(\ndr) =
_
c
0v
0x
I
0u
0x
I
dr
_
S
0u
0n
d:
_
c
(\n n\)dr =
_
S
0u
0n
n
0v
0n
d:
Veamos algunas propiedades del operador diferencial 1 del problema ( )-( )
1. El operador L es Hermite. Esto es,
(1), q) = (), 1q)
_
c
1)qdr =
_
c
)1qdr para cualquier q 1
J
76 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
empleando la segunda frmula de Green cuando n = ), = q, obtenemos:
_
c
(1)q )1q)dr =
_
S
j()
0g
0n
q
0f
0n
)d:
ya que las funciones f y g satisfacen las condiciones de contorno.
c) ,
0f
0n
[
S
= 0, cq ,
0g
0n
[
S
= 0
y a la vez c , 0 en o.
Por esto este sistema homogneo tiene soluciones no triviales. Del lgebra se
desprende
[)
0f
0n
[ = 0,
,
)
0g
0n
q
0f
0n
= 0
[q
0g
0n
[ = 0,
_
S
j()
0g
0n
q
0f
0n
)d: = 0
que equivale a (1), q) (), 1q) = 0 .
2. L es un operador positivo: (1), )) 0
Empleando la primera frmula de Green, n = ) , = ) , tenemos
(1), )) =
_
j(\))
2
dr
_
S
j)
0f
0n
d:
_
c
)
2
dr
y las condiciones de contorno son :
0f
0n
= c),,
si ,(r) 0. ) = 0 si ,(r) = 0.
Entonces
(2.21) (1), )) =
_
c
[j(\()))
2
)
2
[dr
_
S
j
c
,
)
2
d:
suponemos que c(r) 0 y ,(r) 0 en o.
La integral ( ) se denomina integral de energa. Vemos que todos los miembros
son no negativos, obteniendo de esta forma la acotacin
PROPIEDADES DE LOS VALORES PROPIOS DEL OPERADOR L
1. Todos los valores propios del operador 1 son no negativos, ya que (1), )) _ 0
(Ejercicio)
3. MTODO DE FOURIER 77
2. Todas las funciones propias de 1, correspondientes a diferentes valores pro-
pios son ortogonales, ya que 1 es un operador de Hermite. (Ejercicio)
3. Los vectores propios de 1 se pueden elegir reales.
4. Para que ` = 0 sea un valor propio de 1, es necesario y suciente que = 0
y c = 0 . En este caso la correspondiente funcin propia es constante.
TEOREMA
El conjunto de valores propios del operador 1 es contable, y no tiene lmite
nito. Cada valor propio tiene multiplicidad nita, y cada funcin n que pertenece
a 1
J
, se desarrolla en una serie regular y convergente de Fourier con respecto a
sus funciones propias.
1
J
= ) C
2
(G) C
l
(G) 1) integrable al cuadrado
3. Mtodo de Fourier
Veamos en el cilndro innito = G[0, ) el problema mixto para la ecuacin
homognea de tipo hiperblico, G +
n
, G acotada:
0
2
n
0t
2
= di(j(r)\n) n )(r, t) j(r) 0, (r) _ 0 (3.1)
n[
|=0
= n
0
(r), r G
0n
0t
[
|=0
= n
l
(r), r G (3.2)
(3.3) cn ,
0n
0:
[
Jc
= 0, t 0
La solucin clsica del problema mixto (1)-(3) se llama a una funcin n(r, t) de
la clase C
2
()C
l
() que satisface la ecuacin (1) en el cilndro , las condiciones
iniciales (2) sobre la base inferior del cilndro y las condiciones de frontera sobre la
supercie del cilndro.
Las condiciones necesarias para la existencia de la solucin clsica del problema
(1 )-(3) son las siguientes condiciones de suavidad:
) C(), n
o
c
l
(G), n
l
C(G), (3.4)
cn
o
,
0n
o
0:
[
S
= 0,
Un mtodo muy expandido para hallar la solucin de una EDP es el mtodo
de separacin de variables (o mtodo de Fourier); la esencia del mtodo de Fouri-
er consiste en construir una cantidad suciente de soluciones de la ecuacin (1)
(por ahora consideraremos que la funcin )(r, t) es igual a cero) representada por
T(t)\(r), las cuales satisfacen las condiciones de contorno; tomando luego una
combinacin lineal de estas soluciones podemos satisfacer las condiciones iniciales
(2). Busquemos la solucin de la ecuacin (1) de la forma:
n(r, t) = T(t)\(r)
Reemplazando en (1) obtenemos:
78 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
\(r)T"(t) = T(t)(1\)(r)
Dividiendo esta expresin por \(r)T(t), tenemos
\(r)T"(t)
\(r)T(t)
=
T(t)(1\)(r)
\(r)T(t)
obtenemos
(3.5)
T"(t)
T(t)
=
1\
\
La parte izquierda de (5) depende exclusivamente de t, y la derecha de r; de tal
forma (5) debe ser igual a cierta constante `. Esto es:
T" = `T (3.6)
1\ = `\ (3.7)
De esta forma la ecuacin (1) se ha dividido en 2 ecuaciones (6) y (7), las cuales
tienen un menor nmero de variables; es decir las variables se separaron.
Agregumosle a la ecuacin (7) las condiciones de contorno
c\T ,T
0\
0:
[
Jc
= 0,
como T(t) ,= 0, entonces
(ec.8) c\ ,
0\
0:
[
J1
= 0
Con la ecuacin (7) y las condiciones de contorno enunciadas en el rengln
anterior, estamos en el problema de la bsqueda de los valores propios del operador
1, y por tanto de sus respectivas funciones propias.
La ecuacin (6) tiene una solucin de la forma:
(3.8) T
|
(t) =
|
cos(
_
`
|
t) 1
|
sin(
_
`
|
t)
Es decir:
(ec.10) n
|
(r, t) = \
|
(r)T
|
(t)
es solucin de (1) y satisface (3), teniendo un nmero contable de soluciones de
tipo (10). Formando la serie
o
|=l
(
|
cos(
_
`
|
t) 1
|
sin(
_
`
|
t)\
|
(r),
los coeciente
|
, 1
|
puede ser elegidos, de tal forma que la serie satisfaga las
condiciones iniciales:
|
\
|
(r) = n
0
(r) ,
_
(`
|
)1
|
\
|
(r) = n
l
(r)
y expresando n
0
(r), n
l
(r) en una serie en trminos de las funciones propias \
|
(r)
podemos obtener las constantes
|
, 1
|
.
3. MTODO DE FOURIER 79
OBSERVACIONES. El que el mtodo de Fourier pueda o no aplicarse a un
problema particular depende no solo de la ecuacin diferencial, sino del contorno
de la regin G, y de las condiciones de frontera.
Son necesarias tres cosas para aplicar el mtodo a un problema: si tenemos dos
variables r e t :
- El operador diferencial 1 debe ser separable; esto es debe existir una funcin
1(r, t) tal que la expresin
1(\(r)T(t))
1(r, t)\(r)1 (t)
sea una suma una funcin de r,y de
una funcin de t nicamente.
- Todas las condiciones de contorno e iniciales se deben dar sobre rectas parale-
las a los ejes coordenados.
- Los operadores lineales que denen las condiciones de frontera en r = C
l
(por
ejemplo) no deben contener derivadas de n respecto a la variable t, y sus coecientes
deben ser independientes de t.
Por ejemplo:
1. 1n =
0
2
n
0r
2
0
2
n
0r0t
0
2
n
0t
2
,
no cumple la primera condicin enunciada, esto es 1 no es separable.
2. 1n =
0
2
n
0r
2
0
2
n
0t
2
,
la regin G es un polgono regular con lados no paralelos a los ejes coordenados,
falla la segunda condicin.
3.1. Mtodo de Fourier. Caso unidimensional. Consideremos el sigu-
iente problema de valor inicial-frontera
n
||
= a
2
n
rr
(3.9)
n(0, t) = 0, n(|, t) = 0 t 0 (3.10)
n(r, 0) = q(r) n
|
(r, 0) = /(r) (3.11)
Por ser (1) lineal y homognea, la suma de las soluciones particulares es tambin
solucin de la ecuacin.
Busquemos la solucin de la forma,
(3.12) n(r, t) = A(r)T(t)
Reemplazando
(4) en (1) obtenemos:
TA" =
1
a
2
T"A
entonces:
(3.13)
A"
A
=
1
a
2
T"
T
80 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Para que (4) sea solucin, la igualdad (5) debe satisfacer idnticamente, es
decir, para todo r (0, 1), para todo t 0,
(3.14)
A"(r)
A(r)
=
1
a
2
T"(t)
T(T)
= `
donde ` es una constante. De (6)
(3.15) A" `A = 0,
(3.16) T" a
2
`T = 0,
Las condiciones de frontera dan
n(0, t) = A(0)T(t) = 0 n(|, t) = A(|)T(t) = 0
De aqu se deduce que la funcin A(r) debe satisfacer las condiciones comple-
mentaras A(0) = A(|) = 0, puesto que T(t) ,= 0.
El problema se reduce a hallar los valores del parmetro `, para los cuales
existen soluciones no triviales del problema,
(3.17) A"(r) `A = 0, A(0) = A(1) = 0
Si ` _ 0 , no existen soluciones no triviales del anterior problema.
Si ` 0,
A(r) = 1
l
cos(
_
`r) 1
2
sin(
_
`r)
De las condiciones de frontera tenemos
A(0) = 1
l
= 0, A(|) = 1
2
sin(
_
`|) = 0
Como buscamos soluciones no triviales, tenemos que sin(
_
`|) = 0, para |
_
` = :
, : = 0, 1, ... asi que ` =
(:)
2
|
2
, por tanto `
n
=
(:)
2
|
2
, : = 1, 2, ...
A estos valores propios, corresponden las funciones propias:
A
n
(r) = 1
n
sin
:
|
r
donde 1
n
es una constante arbitraria, 1
n
= 1. A estos mismos valores, corresponde
la solucin de (8)
T
n
(t) =
n
cos(
:
|
at) 1
n
sin(
:
|
at)
donde
n
, 1
n
son constantes arbitrarias. Entonces,
n
n
(r, t) = A
n
(t)T
n
(t) = [
n
cos(
:
|
at) 1
n
sin(
:
|
at)[ sin(
:
|
r)
son soluciones particulares de la ecuacin (1). Debido a la linealidad y homogeneidad
de la ecuacin (1) la suma de las soluciones particulares.
(3.18) n(r, t) =
o
n=l
n
n
(r, t)
3. MTODO DE FOURIER 81
Tambin satisface la ecuacin y las condiciones de frontera. Las condiciones iniciales
permiten obtener
n
y 1
n
; si exigimos que (10) satisfaga:
n(r, 0) = q(r) =
n
n
(r, 0) =
n=l
n
sin(
:
|
r) (3.19)
n
|
(r, 0) = /(r) =
0n
n
0t
=
:a1
n
sin((:,|)r) (3.20)
teniendo en cuenta que una funcin arbitraria, continua y derivable )(r), denida
en (0, 1) se desarrolla en una serie de Fourier
)(r) =
/
n
sin(
:
|
r) /
n
=
2
|
_
l
0
)(:) sin(
:
|
:)d:,
entonces
q(r) =
a
n
sin((:,|)r) a
n
= 2,|
_
l
0
q(.) sin(:,|).d. (3.21)
/(r) =
/
n
sin(:,|)r /
n
= 2,|
_
l
0
/(.) sin(:,|).d. (3.22)
Las comparaciones de estas series con las frmulas (11) muestran que para que se
cumplan las condiciones iniciales hay que hacer
n
= a
n
, 1
n
=
1
:a
/
n
, con lo cual
se determina totalmente la funcin (10).
De las condiciones de contorno e iniciales se ve que la funcin n(r, t) es continua;
por lop tanto es necesario demostrar que la serie compuesta por funciones contin-
uas n
n
(r, t) converge uniformemente, o, que es mayorada por una serie numrica
convergente. En este caso tenemos
[n
n
(r, t)[ _ [
n
[ [1
n
[
[n
n
[ _
([
n
[ [1
n
[)
es decir la serie de la derecha mayora la serie
n
n
(r, t). Probar la convergencia
de
[
n
[ [1
n
[ es entonces necesario, no solo para el caso anterior, sino para
la serie
0n
n
0t
, as que demostraremos que la mayorante (a,|)
:([
n
[ [1
n
[)
converge. Finalmente, para probar que n(r, t) satisface la ecuacin diferencial es
necesario derivar dos veces trmino a trmino respecto a t y a r, y esto con lleva el
anlisis de la convergencia de las series:
o
n=l
0
2
n
n
0t
2
,
o
n=l
0
2
n
n
0r
2
,
que estn mayoradas por
:
2
([
n
[ [1
n
[), ya que
0
2
n
n
0r
2
= (,|)
2
:
2
(
n
cos(:at,|) 1
n
sin(:at,|)) sin(:r,|) _
_
:
2
([
n
[ [1
n
[)
Observacin. Sea )(r) una funcin continua y suave a tramos con periodo 2. La
derivada )
t
(r)existe casi en todas partes salvo en los puntos angulares de la grca
82 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
de )(r) y es una funcin acotada. As que la serie de Fourier de )(r) es:
)(r) =
o
n=l
[a
n
cos(:r) /
n
sin(:r)[; donde
a
n
=
1
_
t
t
)(r) cos(:r)dr, /
n
=
1
_
t
t
)(r) sin(:r)dr,
Por lo tanto integrando por partes obtenemos:
a
n
=
1
_
t
t
)(r) cos(:r)dr =
1
:
[)(r) sin(:r)[
t
t
1
:
_
t
t
)
t
(r) sin(:r)dr
/
n
=
1
_
t
t
)(r) sin(:r)dr =
1
:
[)(r) cos(:r)[
t
r=t
1
:
_
t
t
)
t
(r) cos(:r)dr,
Los primeros miembros d ela dercha son iguales a cero. Por lo tanto si representamos
por a
t
n
y /
t
n
los coecientes de Fourier de la funcin )
t
(r), entonces encontramos
(3.23) a
n
=
/
t
n
:
, /
n
=
a
t
n
:
, : = 1, 2...
Ya que la funcin )
t
(r) es acotada y por lo tanto es integrable al cuadrado entonces
la serie:
(3.24)
o
n=l
(a
t2
n
/
t2
n
)
converge. Consideremos las siguientes relaciones:
([a
t
n
[
1
:
)
2
= a
t2
n
2[a/
n
[
:
1
:
2
_ 0,
([/
t
n
[
1
:
)
2
= /
t2
n
2[/
t
n
[
:
1
:
2
_ 0,
de aqu
[a
t
n
[
:
[/
t
n
[
:
_
1
2
(a
t2
n
/
t2
n
)
1
:
2
por lo tanto la serie
(
[a
t
n
[
:
[/
t
n
[
:
) converge. Pero entonces de (15) se desprende
que para cualquier funcin suave a trozos la serie
(3.25)
o
n=l
([a
n
[ [/
n
[)
converge. Por lo tanto tiene lugar el siguiente teorema.
Teorema. Si una funcin 1(r), peridica con perodo 2|, posee / derivdas
continuas, y la derivada (/ 1) es continua a trozos (tramos), la serie numrica
(3.26)
o
n=l
:
|
([a
n
[ [/
n
[)
converge.
Como la funcin q(r) se desarrolla en una serie en sin(
nt
l
r) dada solo en (0, |),
es necesario que q(0) = 0, puesto que al extender en forma impar a q(r) se obtendra
una discontinuidad en el punto r = 0; analgamente, en el punto r = |, debe ser
q(|) = 0. La continuidad de la primera derivada para r = 0, r = | se obtiene
3. MTODO DE FOURIER 83
automaticamente (porque?). En general para la continuidad de las derivadas pares
de la funcin extendida hay que exigir que
q
(|)
(0) = q
(|)
(|) = 0, / = 0, 2, 4, ..
De esta manera para la convergencia de las series
:
|
([
n
[) =
:
|
([a
n
[), (/ = 0, 1, 2)
:
|
([1
n
[) =
:
|
([/
n
[), (/ = 0, 1)
es suciente que las funciones q(r), /(r) satisfagan las siguientes condiciones:
TEOREMA Si q(r) es una funcin dos veces derivable, con derivadas con-
tinuas en el segmento [0, |[, y adems tiene tercera derivada continua a trozos, y
satisface las condiciones q(0) = q(|) = q"(0) = q"(|) = 0 y /(r) derivable y contin-
ua, /"(r) continua a trozos, /(0) = /(|) = 0. Entonces
n(r, t) =
o
n=l
[
n
cos(
:
|
at) 1
n
sin(
:
|
at)[ sin(
:
|
r)
tiene derivadas continuas hasta segundo orden y satisface el problema (1)-(3).
3.1.1. EJEMPLOS. 1. Una cuerda homognea sujeta en los extremos r = 0 y
r = 1, tiene inicialmente la forma de una parbola n = 4/,1
2
(1r)r . Determinar
el desplazamiento de los puntos de la cuerda con respecto al eje r, suponiendo que
no hay velocidades iniciales.
Solucin:
Matemticamente el problema consiste en resolver:
0
2
n
0t
2
= a
2
0
2
n
0r
2
n(0, t) = n(1, t) = 0
n(r, 0) = 4/,1
2
r(1 r)
n
|
(r, 0) = 0
Encontramos los coecientes de Fourier para la funcin (4/,1
2
)r(1 r):
|
= 2,1
_
J
0
(4/,1
2
)r(1 r) sin(/r,1)dr, 1
|
= 0
Integrando por partes la integral para
|
, tenemos,
|
= (16/,/
3
3
) cos(/r,1)[
J
0
= (16/,/
3
3
)(cos / 1)
|
= (16/,/
3
3
)[1 (1)
|
[
Llevando
|
y 1
|
a la expresin de n(r, t) en series de Fourier:
n(r, t) =
|=l
|
cos(/at,1) sin(/r,1)
=
|=l
(16/,/
3
3
)[1 (1)
|
[ cos(/at,1) sin(/r,1)
si / = 2: , 1 (1)
|
= 0 ; y si / = 2: 1 , 1 (1)
|
= 2
84 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
n(r, t) =
|=l
|
cos(/at,1) sin(/r,1)
=
n=l
(16/,/
3
3
)[1 (1)
|
[ cos(/at,1) sin(/r,1)
Si / = 2: , 1 (1)
|
= 0 ; y si / = 2: 1 , 1 (1)
|
= 2
n(r, t) = 82/,
3
n=l
(1,(2: 1)
3
) cos((2: 1)at,1) sin((2: 1)r,1)
EJEMPLO. Integrar la ecuacin de las oscilaciones longitudinales pequeas
de una varilla cilndrica cuando uno de los extremos est jo y el otro libre.
Solucin:
El problema se reduce a resolver la ecuacin
0
2
n
0t
2
= a
2
0
2
n
0r
2
con las condiciones n(0, t) = 0,
0n
0r
(1, t) = 0, t 0; n(r, 0) = )(r),
0n
0t
(r, 0) = 1(r)
, siendo n el desplazamiento de la seccin de abcisa r, y 1 la longitud de la barra.
Resolviendo por el mtodo de separacin de variables n(r, t) = A(r)T(t) obten-
emos el problema de Sturm-Liouville
A" `A = 0
A(0) = A
t
(1) = 0.
Con solucin
A(r) = C
l
cos
_
(`)r C
2
sin
_
(`)r
A(0) = C
l
= 0 A
t
(1) = C
2
((`)1 = 0 == cos(
_
(`)1) = 0
para
_
(`)1 = (2: 1),2, `
n
= (((2: 1),2),1)
2
. Para T(t) tenemos:
T"
n
(((2: 1),21),1)
2
a
2
T
n
= 0 con solucin
T
n
(t) = a
n
cos((2: 1)at,21) /
n
sin(((2: 1),21)at)
Por lo tanto la solucin n(r, t) es:
n(r, t) =
n=0
[a
n
cos(((2:1),21)at)/
n
sin(((2:1),21)at)[ sin(((2:1),21)at)
Para satisfacer las condiciones iniciales se toma:
a
n
= 2,1
_
J
0
)(r) sin(((2: 1),21)r)dr
/
n
= 4,((2: 1)a)
_
J
0
1(r) sin(((2: 1),21)r)dr
EJEMPLO. Una cuerda homognea de longitud 1, sujeta en sus extremos r =
0, r = 1 vibra bajo la accin de una fuerza exterior armnica 1(r, t) = )(r) sinnt
calculada por unidad de longitud. Hallar la desviacin n(r, t) de la cuerda para
condiciones iniciales arbitrarias.
Solucin:
3. MTODO DE FOURIER 85
El problema se reduce a resolver la ecuacin
0
2
n
0t
2
= a
2
0
2
n
0r
2
)(r) sinnt (3.27)
n(0, t) = 0, n(1, t) = 0 (3.28)
n(r, 0) = o
0
(r),
0n
0t
(r, 0) = o
l
(r) (3.29)
Buscamos la solucin del problema en forma de desarrollo en serie de Fourier con
respecto a A
n
, funciones propias del problema de Sturm-Liouville asociado a la
ecaucin homognea
0
2
n
0t
2
= a
2
0
2
n
0r
2
, por lo tanto:
n(r, t) =
n=l
n
n
(t) sin(:r,1)
donde sin(:r,1) son las funciones propias del problema de Sturm-Liouville A"
`A = 0, A(0) = A(1) = 0.
Para determinar n
n
(t), expresamos la funcin )(r, t) = )(r) sinnt en una serie
de Fourier en sin(:r,1), as:
)(r, t) =
)
n
(t) sin(:r,1),
donde )
n
(t) = 2,1
_
J
0
)(r) sinnt sin(:r,1)dr,
lo mismo hacemos con las condiciones iniciales
o
0
(r) =
o
0n
sin(:r,1),
o
0n
= 2,1
_
J
0
o
0
(r) sin(:r,1)dr,
o
l
(r) =
o
l
(:) sin(:r,1),
o
ln
= 2,1
_
J
0
o
l
(r) sin(:r,1)dr
Reemplazamos n(r, t) =
n
n
(t) sin(:r,1) en la ecuacin diferencial (1), y )(r, t)
por su serie correspondiente, obtenemos
o
n=l
sin(:r,1)[n
n
"(t) (:a,1)
2
n
n
)
n
(t)[ = 0
de donde,
n"
n
(t) (:a,1)
2
n
n
)
n
(t) = 0
para todo : = 1, 2, .. Aplicando las condiciones iniciales
n(r, 0) =
n
n
(0) sin(:r,1) =
o
0n
sin(:r,1) = o
0
(r),
n
|
(r, 0) =
n
t
n
(0) sin(:r,1) =
o
ln
sin(:r,1) = o
l
(r)
Luego n
n
(0) = o
0n
, n
t
n
(0) = o
ln
.
86 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Resolviendo la ecuacin diferencial n"
n
(:a,1)
2
n
n
)
n
(t) = 0 con las condi-
ciones anteriores, tenemos:
n
n
(t) = o
0n
cos((:,1)at) 1(o
ln
,:a) sin((:,1)at)
1,(:a)
_
s
0
sin[(:,1)a(t :)[)
n
(:)d:
Si llevamos n
n
(t) a la solucin n(r, t) =
n
n
sin(:r,1),obtenemos:
n(r, t) =
1,(:a)
_
s
0
sin(:,1)a(t :) sin(:r,1))
n
(:)d:
[o
0n
cos(:,|)at
(1,:a)o
ln
sin(:,1)at[ sin(:r,1)
OBSERVACION.
Consideremos la ecuacin lineal no homognea con coecientes constantes:
1n = n
(n)
1
l
n
(nl)
... 1
nl
n
t
1
n
n = )(t)
n
(I)
= 0, i = 0, 1, ..., : 1
cuya solucin se da en la forma:
n(t) =
_
|
0
\ (t :))(:)d:
donde \ (t) es la solucin de la ecuacin homognea 1\ = 0 con condiciones
iniciales \
(I)
(0) = 0, para i = 0, 1, ..., : 2 y \
(nl)
(0) = 1.
n
t
(t) =
_
|
0
\
(l)
(t :))(:)d: \ (0))(t), \ (0) = 0
n"(t) =
_
|
0
\
(2)
(t :))(:)d: \
t
(0))(t), \
t
(0) = 0
............
n
(nl)
(t) =
_
|
0
\
(nl)
(t :))(:)d: \
(n2)
(0))(t), \
(n2)
(0) = 0
n
(n)
(t) =
_
|
0
\
(n)
(t :))(:)d: \
(nl)
(0))(t), \
(nl)
(0) = 1
Sustituyendo estas derivadas en la ecuacin 1n = n
(n)
1
l
n
(nl)
...1
n
n
n
= )(t),
se tiene
1n =
_
|
0
1[\ (t :)[)(:)d: )(t) = )(t).
Para hallar la solucin particular de n"
n
(:a,1)
2
n
n
)
n
(t) = 0 resolvemos la
ecuacin homognea \ "
n
(:a,1)
2
\
n
= 0 con condiciones iniciales \
n
(0) = 0,
\ "
n
(0) = 1 :
\
n
= C
l
sin(:a,1)t C
2
sin(:a,1)t
\
n
(0) = C
2
= 0
\
t
n
(0) = (:a,1)C
l
= 1 ==C
l
= 1,(:a)
\
n
(t) = 1,(:a) sin(:a,1)t
y encontramos la solucin particular n
()
n
(t),
n
()
n
(t) = 1,(:a)
_
|
0
sin(:a,1)(t :))(:)d:
3. MTODO DE FOURIER 87
EJEMPLO. Resolver
0
2
n
0t
2
=
0
2
n
0r
2
)(r, t),
n(0, t) = q
l
(t), n(1, t) = q
2
(t),
n(r, 0) = o
0
(r),
0
2
n
0r
2
(r, 0) = o
l
(r).
Solucin:
Buscamos la solucin en la forma:
n(r, t) = \ (r, t) \(r, t)
donde \(r, t) es una funcin auxiliar que satisface las condiciones de contorno,
y la podemos hallar de la forma
\(r, t) = (c
l
r ,
l
)q
l
(t) (c
2
r ,
2
)q
2
(t), donde c
l
, c
2
, ,
l
, ,
2
se escogen
de tal manera que \ satisfaga las condiciones de frontera, y \ (r, t) es la funcin
buscada que satisface:
0
2
\
0t
2
=
0
2
\
0r
2
)(r, t)
0
2
\
0t
2
0
2
\
0r
2
\ (0, t) = 0 = \ (1, t), \ (r, 0) = o
0
(r) \(r, 0)
0\
0t
(r, 0) = o
l
(r)
0\
0t
(r, 0),
que se resuelve segn lo visto en el ejemplo 3.
EJEMPLO. Estudiar las oscilaciones transversales forzadas de una cuerda su-
jeta en el extremo r = 0, y sometida en el otro extremo, r = 1, a la accin de
una fuerza perturbadora armnica que provoca un desplazamiento igual a sinnt,
donde es contante.
Solucin:
El problema se reduce a integrar la ecuacin:
0
2
n
0t
2
= a
2
0
2
n
0r
2
, n(0, t) = 0, n(1, t) = sinnt
n(r, 0) = 0,
0n
0t
(r, 0) = 0
Sea n = \ \, donde:
\(r, t) = (c
l
r ,
l
)q
l
(t) (c
2
r ,
2
)q
2
(t),
\(0, t) = ,
l
q
l
(t) ,
2
q
2
(t) = 0
,
2
sinnt = 0 ==,
2
= 0, ya que q
l
(t) = 0
\(1, t) = c
2
sinnt = sinnt ==c
2
= 1,
luego \(r, t) = rsinnt
88 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
0\
0t
= nrcos nt
0
2
\
0t
2
= n
2
rsinnt
0\
0r
= ncos nt,
0
2
\
0r
2
= 0
\(r, 0) = 0,
0\
0r
(r, 0) = nr
La funcin \ (r, t) satisface
0
2
\
0t
2
= a
2
0
2
\
0r
2
n
2
rsinnt
\ (0, t) = 0 = \ (1, t), \ (r, 0) = 0,
0\
0r
= nr
Buscamos la solucin de la forma:
\ (r, t) =
o
n=l
\
n
(t)A
n
donde A
n
son las funciones propias del problema de Sturm-Liouville A"`A = 0,
A(0) = A(1) = 0, en el cual las funciones propias son sin:r y los valores propios
`
n
= (:)
2
.Esto es,
\ (r, t) =
n=l
\
n
(t) sin:r
Del ejemplo 3,
\ "
n
(:a)
2
\
n
= )
n
(t), \
n
(0) = 0, \
t
n
(0) = o
ln
donde
)
n
(t) = 2
_
l
0
n
2
rsinnt sin:rdr
2n
2
sinnt
_
l
0
rsin:rdr = 2n
2
sinnt cos :t
l
(:)
= 2
_
l
0
nrsin:rdr = 2ncos :
La solucin particular \
n
(t) (del ejemplo 3) tiene la forma:
\
n
(t) = (1,:a)
_
l
0
sin:a(t :)[[2n
2
cos : sin:n:[d:
y la solucin de la homognea:
\
1
n
(t) = (2ncos :),(:a) sin:at
Reemplazando en la solucin \ (r, t), encontramos que
n(r, t) = rsinnt
n=l
(\
n
(t) \
1
n
(t)) sin:r
3. MTODO DE FOURIER 89
Oscilaciones Elctricas en los Cables. Ecuaciones Telegrcas.
i
r
c
|
G = 0, (3.30)
r
1i
|
1i = 0 (3.31)
Derivemos la primera ecuacin respecto a r y a la segunda respecto a t, tenemos
i
rr
c
|r
G
r
= 0
r|
1i
||
1i
|
= 0
as que : i
rr
G
r
c|i
||
c1i
|
= 0 y sustituyendo en la segunda ecuacin
r
i
rr
= c|i
||
(c1 G|)i
|
G1
I
Si se pueden despreciar las prdidas a travs de la aislacin y si la resistencia
es muy pequea (G = 1 - 0), obtenemos
a =
_
l
Jc
i
||
= a
2
i
rr
EJERCICIOS
1. Resolver la ecuacin diferencial
0
2
n
0t
2
= a
2
0
2
n
0r
2
,
para las siguientes condiciones:
a.
n(0, t) = n(1, t) = 0; n(r, 0) = 0;
0n
0t
= sin(2,1r)
b.
n(0, t) = 0;
0n
0r
(1, t) = 0; n(r, 0) = sin ,21r;
0n
0t
(r, 0) = cos ,21r
c.
n(0, t) = 0; n
r
(1, t) /n(1, t) = 0; n(r, 0) = t
0
(r);
0n
0t
(r, 0) = t
l
(r); / 0
d.
n
r
(0, t) /n(0, t) = c; n(r, 0) = 0;
n
r
(1, t) /n(1, t) = c; n
|
(r, 0) = 0
2. Resolver
0
2
n
0t
2
= a
2
0
2
n
0r
2
c
|
cos ,2r, n
r
(0, t) = 0.
n(1, t) = 0, n(r, 0) = 0 n
|
(r, 0) = 0.
3. Resolver
0
2
n
0t
2
=
0
2
n
0r
2
, , n(0, t) = t
2
, n(1, t) = t
3
n(r, 0) = sinr,
0n
0t
(r, 0) = 0.
90 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
4. Resolver
0
2
n
0t
2
0
2
n
0r
2
2
0n
0t
= 4r 8c
|
cos r,
n
r
(0, t) = 2t, n(
2
, t) = t
n(r, 0) = cos r,
0n
0t
(r, 0) = 2r.
3.2. Membrana rectangular. Como otro problema importante del campo
de las vibraciones, se considera el movimiento de una membrana homognea de masa
: por unidad de rea, elstica y exible, como el parche de un tambor rectangular
o circular, esto es, tan delgada que no ofrece resistencia alguna a la exin. En
primer lugar, supongamos que las vibraciones son tan pequeas que cada punto
se mueve slo en la direccin ., con desplazamiento dado en el instante t por una
funcin n(r, j, t). Consideremos un pequeo fragmento de la membrana ( Fig. )
limitado por planos verticales que pasan por los siguientes puntos del plano rj :
(r, j), (r ^r, j), (r, j ^j), (r ^r, j ^j).La masa del fragmento es igual a
:^r^j, y por la segunda ley de Newton vemos que
(3.32) 1 = :^r^j
0
2
n
0t
2
es la fuerza que actua sobre el fragmento en la direccin .. Cuando la membrana
esta en la posicin de equilibrio, la tensin constante T tiene el siguiente signica-
do fsico: A lo largo de cualquier segmento de longitud ^:, el material a un lado
ejerce una fuerza, normal al segmento y d emagnitud T^:, sobre el material del
otro lado. En este caso las fuerzas sobre aristas opuestas de nuestro pequeo frag-
mento son paralelas al plano rj y se cancelan entre s. Cuando la membrana esta
curvada, como en la posicin instantnea del movimiento que muestra la Figura
, suponemos que la deformacin es tan pequea que la tensin es todava T pero
ahora actua paralelamente al plano tangente, por lo que presenta una componente
vertical apreciable. Es la curvatura del trozo de la membrana la que produce mag-
nitudes diferentes para esas componentes verticales sobre aristas opuestas, y es a
la vez responsable de las fuerzas de recuperacin que darn lugar al moviemiento.
Analizamos estas fuerzas suponiendo que el fragmento de membrana denotado
1C1 est slo ligeramente curvado. Esto hace posible sustituir los senos de ciertos
ngulos pequeos por sus tangentes en lo que sigue. A lo largo d elas aristas 1C y
1, las fuerzas son perpendiculares al eje r y casi paralelas al eje j, con pequeas
componetes en el eje . aproximadamente igual a
T^r(
0n
0j
)
].
y -T^r(
0n
0j
)
]
,
de modo que su suma viene a ser
T^r(
0n
0j
)
].
T^r(
0n
0j
)
]
Haciendo lo mismo para las aristas 1C y 1, hallamos que la fuerza total en la
direccin de n (.), despreciando las fuerzas externas es aproximadamente
1 = T^r(
0n
0j
)
].
T^r(
0n
0j
)
]
T^j(
0n
0j
)
]r.r
T^j(
0n
0j
)
]r
3. MTODO DE FOURIER 91
aplicando el teorema de valor medio y tomando los lmites cuando ^r 0, ^j 0,
tenemos
(3.33)
0
2
n
0t
2
= a
2
(
0
2
n
0r
2
0
2
n
0j
2
)
donde a
2
= T,: que es la ecuacin de ondas bidimensionales, adems se cumple
las condiciones: n = 0 en la frontera
(3.34) n(r, j, 0) = )(r, j),
0n
0t
(r, j, 0) = q(r, j),
Si la membrana tiene la forma rectangular, la condicin n = 0 en la frontera se
escribe de la forma
(3.35) n(0, j, t) = 0, n(a, j, t) = 0; n(r, 0, t) = 0, n(r, /, t) = 0
Aplicando el mtodo de Fourier buscamos la solucin de la forma
(3.36) n(r, j, t) = 1(r, j)T(t)
Sustituyendo (5) en la ecuacin de onda (2), se tiene:
1T" = a
2
(
0
2
1
0r
2
0
2
1
0j
2
)T
Dividiendo por 1T ,
T"
a
2
T
=
1
1
(
0
2
1
0r
2
0
2
1
0j
2
)
Dado que el miembro izquierdo de la igualdad anterior solo depende de t, mientras
que el derecho depende de r, j, las expresiones en ambos miembros deben ser iguales
a una constante, y se puede ver de la misma forma que para el caso unidimensional
donde la constante es negativa. Denotemos esta constante como j
2
. Entonces:
(3.37) T" a
2
j
2
T = 0
(3.38)
0
2
1
0r
2
0
2
1
0j
2
j
2
1 = 0
(3.39) 1(0, j) = 0, 1(a, j) = 0; 1(r, 0) = 0; 1(r, /) = 0.
Esto es, tenemos un problema de bsqueda de valores propios del operador 1 que
acta sobre la funcin n por la regla:
1n = (
0
2
n
0r
2
0
2
n
0j
2
) = ^n
Por el mtodo de Fourier, 1(r, j) = A(r)1 (j), y al sustituirla en (7) se obtiene:
A"1 = (A1 " j
2
A1 ),
dividiendo ambos miembros por A 1
A",A = 1,1 (1 " j
2
1 ),
y A",A = i
2
; 1,1 (1 " j
2
1 ) = i
2
A" i
2
A = 0 1 " .
2
1 = 0 donde .
2
= j
2
i
2
92 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
junto con las condiciones A(0) 1 (j) = 0, A(a) 1 (j) = 0, A(r) 1 (0) = 0,
A(r) 1 (/) = 0, de donde se desprende que A(0) = 0, A(a) = 0, 1 (0) = 0,
1 (/) = 0.
Resolviendo estos problemas, obtenemos:
A(r) = cos(ir) 1sin(ir)
1 (j) = C cos(jj) 1sin(jj)
y de las condiciones de contorno
i =
:
a
, . =
:
/
luego
A
n
(r) = sin(:r,a); 1
n
(j) = sin(:j,/) y 1
nn
(r, j) = sin(:r,a) sin(:j,/),
son las funciones propias del operador 1, cuyos valores propios son
j
nn
=
_
(:
2
,a
2
:
2
,/
2
) :, : = 1, 2, ...
La solucin correspondiente a la ecuacin T" a
2
j
2
T = 0 ser
T
nn
(t) =
nn
cos(j
nn
at) 1
nn
sin(j
nn
at)
y
n(r, j, t) =
n=l
n=l
n
nn
(r, j, t) =
=
n=l
n=l
[
nn
cos(j
nn
at) 1
nn
sin(j
nn
at)[ sin(:r,a) sin(:t,/)
Para satisfacer las condiciones iniciales utilizamos el teorema de Steklov y expre-
samos las funciones )(r, j) y q(r, j) en una serie con respecto a las funciones propias
del operador 1, o sea
)(r, j) =
o
n,n=l
a
nn
1
nn
(r, j)
donde
a
nn
= 1,|1
nn
|
2
_
o
0
_
b
0
)(r, j) sin(:r,a) sin(:j,/)drdj
q(r, j) =
o
n,n=l
/
nn
1
nn
;
/
nn
= 1,|1
nn
|
2
_
o
0
_
b
0
q(r, j) sin(:r,a) sin(:j,/)drdj
Luego:
nn
= a
nn
1
nn
= (1,j
nn
)/
nn
Hemos obtenido as la solucin del problema ( )-( ).
EJEMPLO
Una membrana homognea cuadrada, que tiene en el instante inicial t = 0
la forma rj(1 r)(1 j), comienza a vibrar sin velocidad inicial. Investigar las
vibraciones libres de la membrana, si est sujeta por los bordes.
3. MTODO DE FOURIER 93
Solucin:
Tenemos que
n(r, j, t) =
(
nn
cos j::at 1
nn
sinj
nn
at) sin:rsin:j
nn
= 4
_
l
0
_
l
0
rj(1 r)(1 j) sin:rsin:jdrdj =
4
_
l
0
j(1 j) sin:jdj
_
l
0
r(1 r) sin:rdr
1
nn
= 4,j
n,
_
l
0
_
l
0
0 sin:rsin:jdrdj = 0
luego
n(r, j, t) = 64,
6
n
sin(2: 1)rsin(2: 1)j
(2: 1)
3
(2: 1)
3
cos
_
((2: 1)
2
(2: 1)
2
)at(2: 1)8
3.3. Membrana circular. El problema consiste ahora en hallar las vibra-
ciones transversales de una membrana homognea redonda de radio 1, sujeta por
los bordes, si en momento inicial tiene la forma de supercie de revolucin )(r, j)
y las velocidades iniciales son q(r, j)
(3.40)
0
2
n
0t
2
= a
2
^n
(3.41) n
J1
= 0 n(r, j, 0) = )(r, j), n
|
(r, j, 0) = q(r, j)
Observemos que ahora las condiciones de frontera no se separan ya que no se
dan sobre lneas paralelas a los ejes; si logramos transformar la regin de tal forma
que las condiciones de frontera se dieran sobre lneas paralelas a los correspondientes
ejes, podemos usar los resultados de arriba. Cambiemos a un sistema de coordenadas
polares (r, 0) denido por r = r cos 0 , y j = r sin0, por lo tanto la regin se
transforma en un rectngulo [0, 1[ [0, 2[.
El problema queda entonces enunciado de la siguiente manera:
0
2
n
0t
2
= a
2
(1,r
0
0r
(r
0n
0r
) 1,r
2
0
2
n
00
2
), (3.42)
n(1, 0, t) = 0; n(r, 0, 0) = )(r, 0), n
|
(r, 0, ) = q(r, 0), (3.43)
ya que la membrana est ja a lo largo de la frontera n(0, 0, t) es acotada,
adems
(3.44) n(r, 0, t) = n(r, 0 2, t)
Buscamos la solucin por el mtodo de Fourier, o (separacin de variables
(3.45) n(r, 0, t) = \ (r, 0)T(t)
sustituyendo (4) en (1) y dividiendo por \ (r, 0)T(t), e igualando a `, se tiene
94 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
T",a
2
T = 1,\ [1,r
0
0r
(r
0\
0r
) 1,r
2
0
2
\
00
2
[ = `
de donde
T" `a
2
T = 0
1,r
0
0r
(r
0\
0r
) 1,r
2
0
2
\
00
2
= `\
junto con las condiciones de frontera que se obtienen al reemplazar (4 ) en (2).
Planteamos el problema de la bsqueda de valores propios del operador 1, para
el cual
1n = 1,r
0
0r
(r
0n
0r
) 1,r
2
0
2
n
00
2
1\ = `\ ; \ (0, 0) acotado (3.46)
\ (1, 0) = 0, \ (r, 0) = \ (r, 0 2) (3.47)
buscamos a la solucin \ (r, 0) = A(r)1 (0), sustituyendo (5), luego de dividir
por A(r).1 (0), tenemos:
1
A
[r
d
dr
(r
dA
dr
)[ 1 ",1 `r
2
= 0
1,Ar
d
dr
(r
dA
dr
) `r
2
= 1 ",1 = j
de donde
1 " j1 = 0 (3.48)
1,r
d
dr
(r
dA
dr
) (` j,r
2
)A = 0 (3.49)
con condiciones de contorno
1 (0) = 1 (0 2), A(0) acotada, A(1) = 0
Para obtener soluciones no triviales peridicas para 1 , j debe ser igual a :
2
y la
solucin tendr la forma
1
n
(0) = 1
ln
cos :0 1
n2
sin:0
Para resolver el problema
1,r
d
dr
(r
dA
dr
) (` :
2
,r
2
)A = 0,
A(0) acotada, A(1) = 0,
introduzcamos el siguiente cambio de variable :
. =
_
`r, A(r) = A(.,
_
`) = 1 (.),
obteniendo la ecuacin
d
2
n
d.
2
1,.
dn
d.
(1 :
2
,.
2
)n = 0
3. MTODO DE FOURIER 95
n(.
0
) = 0, .
0
=
_
`1, n(0) acotada.
La solucin de esta ecuacin es:
n(.) = d
l
J
n
(.) d
2
n
(.)
donde J
n
(.) son funciones de Bessel y
n
(.) funciones de Neumann de orden :.
De la condicin de acotamiento se desprende que d
2
= 0, y la primera condicin
nos da J
n
(
_
`1) = 0. Denotando como j
(n)
n
=
_
`1 , , `
n,n
= (j
(n)
n
,1)
2
cuya
funcin propia A
nn
= J
n
(j
(n)
n
,1). Se debe recordar que entre las propiedades de
las funciones de Bessel estn: - Las funciones propias correspondientes a valores
propios ` diferentes, son ortogonales con funcin peso r:
_
1
0
rA
nnl
A
nn2
dr = 0, :
l
,= :
2
- La norma de una funcin de Bessel,
|J
t
n
(j
(n)
n
r,1)|
2
es :
_
1
0
rJ
2
n
(j
(n)
n
r,1)dr = 1
2
,2[J
t
n
j
(n)
n
[
2
.
Adems, cualquier funcin dos veces derivable, continua junto con sus derivadas
en (0, 1) , satisface las condiciones )(0) acotada y )(1) = 0 ; se puede expresar en
una serie convergente (absolutamente y uniformemente) con respecto al conjunto
de funciones J
n
(j
(n)
n
r,1) , o sea
)(r) =
o
n=l
)
n
J
n
((j
(n)
n
r,1))
)
n
= 1,|J
n
|
2
_
1
0
r)(r)J
n
((j
(n)
n
r,1))dr
Volviendo a nuestro problema original tenemos:
`
n,n
= ((j
(n)
n
,1))
2
y sus correspondientes funciones propias
\
(l)
n,n
= J
n
((j
(n)
n
,1)r) cos :0
\
(2)
n,n
= J
n
((j
(n)
n
,1)r) sin:0
Tomando la combinacin lineal de \
(l)
y \
(2)
,
\
n,n
= J
n
((j
(n)
n
,1)r)[
nn
cos :0 1
nn
sin:0[
96 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Para evaluar la norma de \
n,n
podemos hacer lo siguiente:
_
1
_
1
\
l
nl,nl
\
(l)
n2,n2
drd0 =
_
1
0
_
2t
0
J
nl
((j
(nl)
nl
,1)r) cos :
l
0 + J
n2
((j
(
n2
:2),1)r) sin:
2
0rdrd0
=
_
1
0
rJ
nl
((j
(nl
nl
,1)r)J
n2
((j
(n2)
n2
,1)r)dr
_
2t
0
cos :
l
0 sin:
l
0d0
De la misma manera obtenemos la norma para \
2
n,n
.
De la teora general se deduce que ualquier funcin 1(r, 0) con derivadas
primera y segunda continuas, que satisfaga las condiciones de frontera del problema
se puede desarrollar en la serie:
1(r, 0) =
n=0
n=0
(
n,n
\
(l)
n,n
1
n,n
\
(2)
n,n
)
que converge uniforme y absolutamente; y cuyos coecientes son:
n,n
= 1,|\
n,n
|
2
_
2t
0
_
1
0
1(r, 0)J
n
(j
(n)
n
,1r) cos :0rdrd0
1
n,n
= 1,|\
n,n
|
2
_
2t
0
_
1
0
1(r, 0)J
n
(j
(n)
n
,1r) sin:0rdrd0
Volviendo al problema inicial de las oscilaciones transversales de una membrana
circular con desviacin y velocidad inicial dada, su solucin se puede escribir de la
forma:
n(r, 0, t) =
\
(l)
n,n
(
n,n
cos j
(n)
n
at,1 1
n,n
sinj
(n)
n
at,1
\ (2)
n,n
(C
n,n
cos j
(n)
n
at,1 1
n,n
sinj
(n)
n
at,1t)
los coecientes
n,n
, 1
n,n
, C
n,n
, 1
n,n
se determinan de las condiciones iniciales.
EJEMPLO. Hallar las vibraciones propias de una membrana homognea cir-
cular de radio 1, sujeta por los bordes; si en el momento inicial tiene la forma de
un paraboloide de revolucin y la velocidad inicial es igual a cero.
Solucin:
Debemos resolver la ecuacin
0
2
n
0r
2
1,r
0n
0r
= 1,a
2
0
2
n
0t
2
n(0, t) es de magnitud nita,
n(1, t) = 0; n(r, 0) == (1
r
2
1
2
);
donde es una constante
0n
0t
(r, 0) = 0
3. MTODO DE FOURIER 97
Se observa que en la ecuacin diferencial no aparece la segunda derivada con
respecto a 0, esto se debe a que la funcin n no depende de 0; de acuerdo a las
condiciones iniciales. en este caso tenemos : = 0, y la solucin
n(r, t) =
n=0
\
(l)
0,n
0,n
cos[atj
(0)
n
,1[ 1
o,n
sin[atj
(0)
n
,1[
n(r, t) =
n=0
J
0
(j
(0)
n
r,1)(
0,n
cos aj
(0)
1
t,1 1
0,n
sinaj
(0)
n
t,1)
con las condiciones iniciales:
n(r, 0) = (1 r
2
,1
2
) =
n=0
a
n
J
0
(j
(0)
n
r,1)
con:
a
n
= 1,|J
0
(j
(0)
n
r,1)|
2
_
1
0
(1 r
2
,1
2
)J
0
(j
(0)
n
r,1)rdr
|J
0
|
2
= 1
2
,2[J
t
0
(j
(0)
n
)[
2
= 1
2
,2J
2
l
(j
(0)
n
)
Calculando las integrales
_
1
0
rJ
0
(j
(0)
n
r,1)dr 1,1
2
_
2
0
r
3
J
0
(j
(0)
n
r,1)dr
y teniendo en cuenta que
_
r
0
r
3
J
0
(r)dr = 2r
2
J
0
(r) (r
3
4r)J
l
(r)
obtenemos
n(r, t) = 8
o
n=l
(J
0
(j
(0)
n
,1r),(j
3
n
J
l
(j
(0)
n
)) cos aj
(0)
n
t,1
EJEMPLO. Hallar las oscilaciones de una membrana circular con el borde
jo en un medio sin resistencia causadas por la presin constante uniforme.
Demostracin de las propiedades de ortogonalidad.
Sea j = J
(r) solucin
(3.50) j
"
1
r
j
0
(1
j
2
r
2
)j = 0
Sean a y / son constantes positivas distintas, las funciones n(r) = J
(cr) y
(r) = J
(/r) satisfacen
(3.51) n
"
1
r
n
0
(a
2
j
2
r
2
)n = 0
(3.52)
"
1
r
0
(/
2
j
2
r
2
) = 0
98 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Ahora multipliquemos estas ecuaciones respectivamente por y n, restamos los
resultados y obtenemos
(3.53)
d
dr
(n
0
0
n)
1
r
(n
0
0
n) = (/
2
a
2
)n
multiplicando () por r tenemos
d
dr
(r(n
0
0
n)) = (/
2
a
2
)nr
Integrando desde 0 a 1resulta
(/
2
a
2
)
l
_
0
rndr =
_
r
_
n
0
0
n
__
[
l
0
observemos que n(1) = J
(a) y (1) = J
(/) si a y / son ceros distintos positivos
de J
(r), tenemos
l
_
0
rJ
(`
n
r)J
(`
n
r)dr = 0
l
_
0
rJ
2
(`
n
r)dr =
1
2
J
2
l
(`
n
)
Ejercicios. Encontrar la solucin del problema mixto
0
2
n
0t
2
=
0
2
n
0r
2
1
r
0n
0r
)(t)J
o
(j
|
r),
n(1, t) = 0, n(r, 0) = 0,
0n
0t
(r, 0) = 0.
donde j
|
son las races positivas de la ecuacin J
o
(j) = 0, 0 < r < 1; si
1. )(t) = t
2
1,
2. )(t) = sint cos t
4. Ecuaciones diferenciales parablicas
4.1. Principio del Valor Mximo. Si una funcin n(r, t), determinada y
continua en la regin cerrada 0 _ t _ T y 0 _ r _ 1, satisface la ecuacin de
el calor n
|
= a
2
n
rr
, en los puntos de la regin , los valores mximo y mnimo de
la funcin n(r, t) se alcanza o bien en el momento inicial, o bien en los puntos de
frontera r = 0
0 r = 1. Veamos primero la demostracin de el teorema para el valor
mximo. La demostracin se lleva a cabo por el mtodo de reduccin al absurdo.
Denotemos por ' el valor mximo de n(r, t) para t = 0 (0 _ r _ 1), o para r = 0,
o bien para r = 1 (0 _ t _ T) y supongamos que en cierto punto (r
0
, t
0
) la funcin
n(r, t) alcanza su valor mximo, igual a n(r
0
, t
0
) = ' c. Comparemos los signos
de ambos miembros de la ecuacin n
|
= a
2
n
rr
en el punto (r
0
, t
0
). Como en este
punto la funcin alcanza su valor mximo, necesariamente debe ser n
r
(r
0
, t
0
) = 0
y n
rr
(r
0
, t
0
) _ 0. Continuando, como n(r
0
, t) alcanza su valor mximo para t = t
0
,
4. ECUACIONES DIFERENCIALES PARABLICAS 99
entonces n
|
(r
0
, t
0
) _ 0. Comparando los signos de ambos miembros de la ecuacin
n
|
= a
2
n
rr
se observa que estos son diferentes. Sin embargo, este razonamiento aun
no demuestra el teorema, puesto que ambos miembros pueden ser iguales a cero,
lo cual no implica ninguna contradiccin. Para efectuar la demostracin completa
hallemos un punto (r
l
, t
l
) en el cual n
rr
_ 0 y n
|
0. Para esto tomemos la
funcin auxiliar.
(r, t) = n(r, t) /(t
o
t),
donde / es cierto nmero constante. Es evidente que:
(r
0
, t
0
) = n(r
0
, t
0
) = ' c1(t
0
t) _ /T.
Tomemos / 0 de forma tal que /T sea menor que c,2, es decir / < c,2T; entonces
el valor mximo de (r, t) para t = 0, o bien para r = 0, r = 1 no superara a
' c,2, es decir,
(r, t) _ ' c,2 ` o r = 0, ` o r = 1.
Puesto que n(r, t) no supera a ' y /(t
0
t) no supera a c,2. En virtud de la
continuidad de la funcin (r, t), esta debe alcanzar su mximo valor en cierto
punto (r
l
, t
l
). Es evidente que (r
l
, t
l
) _ (r
0
, t
0
) = ' c. Por esto, t
l
0,
0 < r
l
< 1, puesto que para t = 0 r = 0, r = 1 se tiene (r, t) _ ' c,2.
En el punto (r
l
, t
l
) se cumple
rr
(r
l
, t
l
) _ 0 y
|
(r
l
, t
l
) _ 0. Teniendo encuenta
(r, t) = n(r, t) /(t
0
t), se halla:
n
rr
(r
l
, t
l
) =
rr
(r
l
, t
l
) _ 0
n
|
(r
l
, t
l
) =
|
(r
l
, t
l
) / _ / 0.
De aqu se deduce que:
n
|
(r
l
, t
l
) a
2
n
rr
(r
l
, t
l
) _ / 0,
es decir no se satisface la ecuacin n
|
= a
2
n
rr
, en el punto interior. Con esto queda
demostrado que la solucin n(r, t) de la ecuacin de la conduccin de el calor, dentro
de la regin, no pueden tomar valores que superen al valor mximo de n(r, t) en la
frontera. Analogamente se puede demostrar tambien la segunda parte de el teorema,
sobre el mnimo, aunque esto no tiene sentido demostrase por separado, puesto que
la funcin n
l
= n tiene su valor mximo donde u tiene el mnimo.
100 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
4.2. Problema de valor inicial-forntera. Hallar la solucin continua en
la regin 0 _ r _ 1 , 0 _ t _ T, de la ecuacin homognea
(4.1)
0n
0t
= /(t)
0
2
n
0r
2
, 0 < r < 1, 0 < t _ T
que satisfaga la condicin inicial
(4.2) n(r, 0) = o(r), 0 _ r _ 1
y las condiciones homogneas de frontera
(4.3) n(0, t) = 0, n(1, t) = 0, 0 _ t _ T.
donde /(t) C [0, T[ , /(t) 0 para t [0, T[ ; la funcin o(r) es una funcin
continua en 0 _ r _ 1 con derivada continua a trozos y o(1) = o(0) = 0
. Buscando la solucin de la forma
n(r, t) = n(r)T(t)
Obtenemos
n" `n = 0
n(0) = 0, n(1) = 0 (4.4)
(4.5) T" `/(t)T = 0
Resolviendo el problema de Sturm-Liouville, tenemos que
`
n
= (:,1)
2
, : = 1, 2, ... n
n
= sin(:r,1)
A estos valores `
n
le corresponde las soluciones de (5)
T
n
(t) = c
n
oxp
_
_
_
(:,1)
2
|
_
0
/(:)d:
_
_
_
donde c
n
son coecientes por ahora indeterminados. Escribiendo formalmente la
serie
(4.6) n(r, t) =
c
n
oxp
_
_
_
(:,1)
2
|
_
0
/(:)d:
_
_
_
sin(:r,1),
observamos que n(r, t) satisface todas las condiciones de frontera puesto que las
satisfacen todos los trminos de la serie.
Al pedir que se cumplan las condiciones iniciales, se obtiene
(4.7) o(r) = n(r, 0) =
c
n
sin(:r,1)
esto es los c
n
son los coecientes de Fourier de la funcin o(r) al desarrollarla en
serie de senos en el intervalo (0, 1):
c
n
= o
n
= 2,1
_
J
0
o(r) sin(:r,1)dr,
luego
(4.8)
n(r, t) =
o
n=l
2,1
_
J
0
o() sin(:,1)d oxp
_
_
_
(:,1)
2
|
_
0
/(:)d:
_
_
_
sin(:r,1)
4. ECUACIONES DIFERENCIALES PARABLICAS 101
Demostremos que la serie (9) satisface todas las condiciones del problema (1)-(3):
Como la ecuacin (1) es lineal, en virtud del principio de superposicin, la serie
formada por soluciones particulares, tambin ser solucin, si sta converge y se le
puede derivar trmino a trmino dos veces con respecto a r, y una vez con respecto
a t. Si tomamos t _ t
t
0 (t
t
es un nmero auxiliar cualquiera), demostraremos
que las series de las derivadas
0n
n
0t
,
0
2
n
n
0r
2
convergen uniformemente. En efecto
[
0n
n
0t
[ = [ c
n
(:,1)
2
/(t) oxp
_
_
_
(:,1)
2
|
_
0
/(:)d:
_
_
_
sin(:r,1)[
[
0n
n
0t
[ < [c
n
[[(:,1)
2
oxp
_
_
_
(:,1)
2
|
_
0
/(:)d:
_
_
_
[
Recordando que
c
n
= 2,1
_
J
0
o(r) sin(:r,1)dr,
de aqu vemos que [c
n
[ < 2' , donde ' es una constante mayor que cero; asi que
[
0n
n
0t
[ < 2'(,1)
2
:
2
c(:,1)
2
a
2
t
t
, [
0
2
n
n
0r
2
[ < 2'(,1)
2
:
2
oxp(:,1)
2
a
2
t para t _ t
t
Investiguemos la convergencia de la serie mayorante
o
n=l
c
n
, donde
c
n
= :
2
oxp(:,1)
2
a
2
t
t
En virtud del criterio del cociente, esta serie es convergente ya que
lim
no
[c
nl
,c
n
[ = lim
no
((: 1)
2
,:
2
)(c
(t/2)
2
o
2(2r+1)
|
0
= lim
no
(1 1,:)
2
c
(t/J)
2
o
2(2r+1)
|
0
De aqu se desprende la posibilidad de derivar la serie (9) trmino a trmino; y dado
que t
t
es arbitrario, podemos tomar esta condicin para t 0.
Ejemplo.
Se tiene una varilla delgada de longitud 1, compuesta de dos trozos heterog-
neos. El extremo r = 0 se mantiene a una temperatura de cero grados, lo mismo que
el extremo r = 1. La temperatura inicial dentro de la barra es )(r). Determinar la
temperatura para t 0.
Solucin: El modelo matemtico asociado a este problema es:
a
2
l
0n
0t
=
0
2
n
0r
2
, 0 < r _ r
0
a
2
2
0n
0t
=
0
2
n
0r
2
, r
0
_ r < 1
102 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
donde a
2
I
= c
I
j
I
,/
I
, i = 1, 2 con las condiciones
n(0, t) = 0, n(|, t) = 0, n(r
0
0, t) = n(r
0
0, t)
/
l
0n
0r
(r
0
0, t) = /
2
0n
0r
(r
0
0, t)
n(r, 0) = )(r)
Buscamos la solucin del problema en forma n(r, t) = A(r)T(t). Reemplazando en
el conjunto de ecuaciones, obtenemos:
T
t
`
2
T = 0 0 < t < (4.9)
A" `
2
a
2
l
A = 0, A(0) = 0, (4.10)
A(r
o
0) = A(r
o
0) (4.11)
/
l
A
t
(r
0
0) = /
2
A
t
(r
0
0) (4.12)
A" a
2
2
`
2
A = 0 A(1) = 0 (4.13)
Por lo tanto A(r) es igual
A(r) =
sina
l
`r
sina
l
`r
0
, 0 < r < r
o
A(r) =
sina
2
`(1 r)
sina
2
`(1 r
0
)
, r
0
< r < 1
satisfaciendo (12) se tiene:
a
l
`/
l
(cos a
l
r
0
)
sina
l
`r
0
=
`a
2
/
2
cos a
2
`(1 r
0
)
sina
2
`(1 r
0
)
a
l
/
l
col a
l
`r
0
= a
2
/
2
col a
2
`(1 r
0
) (4.14)
Resolviendo esta ecuacin transcendental obtenemos los valores propios del prob-
lema. Sea ` = `
n
, donde los `
n
, son las races de la ecuacin (13); encontramos
ahora las funciones propias A
n
(r) :
(4.15) A
n
(r) =
_
_
sina
l
`
n
r
sina
l
`
n
r
o
, 0 < r < r
o
sina
2
`
n
(1 r)
sina
2
`
n
(1 r
o
)
, r
o
< r < 1
con norma
|A
n
|
2
=
_
J
0
A
2
n
(r)dr =
_
r0
0
(sin
2
a
2
`
n
r),(sin
2
a
l
`
l
r
0
)dr
_
J
r0
(sin
2
a
2
`
n
(1 r)),(sin
2
a
2
`
n
(1 r
0
)dr
La solucin n(r, t) ser
n(r, t) =
o
n=l
a
n
A
n
c
Xr|
4. ECUACIONES DIFERENCIALES PARABLICAS 103
Para satisfacer la condicin inicial se desarrolla la funcin )(r) en una serie de
Fourier en las funciones propias A
n
;
)(r) =
o
n=l
n
A
n
(r)
n
= 1,|A
n
|
2
_
J
o
)(r)A
n
(r)dr
Para que n(r, t) satisfaga la condicin inicial hacemos a
n
=
n
.
2. Se tiene una varilla homognea delgada de longitud | a temperatura inicial
r,|. El extremo r = 0 se mantiene a cero grados, y en r = | la temperatura vara
segn la ley n(1, t) = c
|
. Hallar la temperatura a lo largo de la varilla para t 0.
3. Hallar la solucin de la ecuacin
0n
0t
= a
2
0
2
n
0r
2
, 0 < r < 1, t 0
n(0, t) = 1 c
|
, n(r, 0) = 0
0n
0r
n[
r=l
= 0.
4. Una solucin de cierta sustancia se encuentra contenida entre los planos
r = 0 y r = / , siendo la concentracin inicial de la sustancia, constante (c
0
). En
un momento dado la sustancia disuelta empieza a difundirse hacia un disolvente
situado entre los planos r = / y r = 1. Determinar el proceso de compensacin de
la concentracin sabiendo que los planos r = 0 y r = 1 son impermeables para la
sustancia.
5. Una barra de longitud 1 est formada de dos trozos heterogneos de igual
seccin transversal, que se unen en el punto r = r
0
y poseen las caractersticas a
l
,/
l
y a
2
,/
2
respectivamente. Hallar la temperatura permanente en esta barra (ondas
trmicas), si un extremo de ella (r = 0) se mantiene a cero grados, y la temperatura
del segundo vara sinusoidalmente con el tiempo.
6. Hallar la temperatura n(r, t) de una barra cuya temperatura inicial es igual
a cero, si las condiciones de frontera tienen la forma n(0, t) = c
o|
, n(1, t) = 1,
siendo y 1 constantes, y c 0.
Resolver: 7.
0n
0t
= a
2
0
2
n
0r
2
,n,
n(0, t) = n(1, t) = 0
n(r, 0) = o(r)
8.
0n
0t
= a
2
0
2
n
0r
2
,n,
n(0, t) = 0;
0n
0r
(0, t) = 0
n(r, 0) = sin(r,1)
104 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
9.
0n
0t
= a
2
0
2
n
0r
2
,
n(0, t) = 0,
0r
0n
(1, t) = ,
n(r, 0) = r.
10. Mostrar que la ecuacin diferencial \
|
= a
2
\
rr
/\
r
se reduce a la
forma n
|
= a
2
n
rr
si se realiza el cambio
n = c
rX|
.n con ` =
o
2o
2
` =
o
2
do
2
4.3. Propagacin de calor en la recta innita. Adems de los proble-
mas citados anteriormente, a menudo se encuentran los casos lmite. Consideremos
el proceso de calor en una barra muy larga. Durante un pequeo intervalo de tiem-
po, la inuencia del rgimen trmico dado en la frontera inuye muy dbilmente
en la parte central de la barra, y la temperatura en este intervalo se determina
fundamentalmente solo por la distribucin inicial de la temperatura. En este caso,
el clculo exacto de la longitud de la barra no tiene signicacin puesto que la
variacin de la longitud no inuir fundamentalmente en la temperatura del inter-
valo que nos interesa; en problemas de este tipo comnmente se considera que la
barra posee longitud innita. De este modo, se plantea el problema en condiciones
iniciales (Problema de Cauchy) sobre la distribucin de la temperatura en la recta
innita: "Hallar la solucin de la ecuacin del calor en la regin < r < y
t _ t
0
, que satisfaga n(r, t
0
) = o(r), donde o(r) es una funcin dada."
El problema a resolver ser:
0n
0t
= a
2
0
2
n
0r
2
, < r < (4.16)
n(r, 0) = o(r) (4.17)
Busquemos la solucin particular de la ecuacin en la forma
n(r, t) = A(r)T(t)
Reemplazando en (1) obtenemos
T
t
a
2
`
2
T = 0
A" `
2
r = 0
Cuya solucin es:
T = cc
o
2
X
2
|
A = cos(`r) 1sin(`r);
llevando estas soluciones a (3) se tiene
n
X
(r, t) = c
o
2
X
2
|
[(`) cos(`r) 1(`) sin(`r)[
donde las constantes se han incluido en (`), 1(`).
La suma de las soluciones de la forma tambin es una solucin:
X
c
o
2
X
2
|
[(`) cos(`r) 1(`) sin(`r)[
4. ECUACIONES DIFERENCIALES PARABLICAS 105
El parmetro ` puede variar de manera continua, por lo tanto integrando la expre-
sin (4) respecto al parmetro `, obtenemos la solucin
n(r, t) =
_
o
0
c
o
2
X
2
|
[(`) cos(`r) 1(`) sin(`r)[
si suponemos que (`) y 1(`) son absolutamente integrables en (0, ) exijamos
ahora que n(r, t) satisfaga (3), haciendo t = 0 en (5) , se tiene
n(r, 0) = o(r) =
_
o
0
[(`) cos `r 1(`) sin`r[d`
Supongamos que o(r) es tal que pueda ser representada por la integral de
Fourier,
o(r) = 1,
_
o
0
_
o
o
o(c) cos `(c r)dcd` = (4.18)
= 1,
_
o
0
_
o
o
o(c) cos `cdccos `r (4.19)
_
o
o
o(c) sin`cdcsin`rd` (4.20)
Comparando los segundos miembros de (6) y (8),
(`) = 1,
_
o
o
o(c) cos `cdc
1(`) = 1,
_
o
o
o(c) sin`cdc
y sustituyendo estas expresiones en (5) obtenemos
n(r, t) = 1,
_
o
0
c
o
2
X
2
|
_
o
o
o(c) cos `cdccos `r
_
In}|
o
o(c) sin`cdcsin`rd`
= 1,
_
o
0
c
o
2
X
2
|
[
_
o
o
o(c) cos `(c r)dc[d`
= 1,
_
o
o
o(c)
_
o
0
c
o
2
X
2
|
cos `(c r)d`dc
Al evaluar:
_
o
0
c
o
2
X
2
|
cos `(c r)d` = 1,a
_
t
_
o
0
c
:
2
cos ,.d.
por el cambio de variable a`
_
t = . , (c r),a
_
t = , ; si tomamos:
1(,) =
_
o
0
c
:
2
cos ,.d.
entonces
1
t
(,) =
_
o
0
c
:
2
. sin,.d.,
106 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
al integrar por partes:
1
t
(,) = 1,2[c
:
2
sin,.[
o
0
,,2
_
o
0
c
:
2
cos ,.d.
1
t
(,) = ,,21(,)
de donde
1(,) = cc
o
2
/d
;
Para evaluar c, en (10)
1(0) =
_
o
0
c
:
2
d. =
_
,2 = c
Luego
1(,) =
_
,2c
o
2
/d
Asi que
n(r, t) = 1,2a
_
t
_
o
o
o(c)c
(or)
2
/do
2
|
dc
Est formula se llama integral de Poisson y es la solucin del problema plantea-
do sobre la propagacin del calor en una barra innita. Hagamos
G(r, c; t) =
1
2
_
a
2
t
c
](ro)/do
2
|
La funcin G(r, c; t) determinada por la frmula ( )se llama amenudo solucin
fundamental de la ecuacin de conduccin del calor. Se puede demostrar, por com-
probacin directa que la funcin
G(r, c; t t
o
) =
Q
cj2
_
a
2
(t t
o
)
c
](ro)/do
2
(||c)
es la temperatura en el punto r en el momento t, si en el momento inicial del
tiempo t = t
o
en el punto r se genera una cantidad de calor Q = cj. La funcin
G(r, c; t t
o
) satisface a la ecuacin (1) respecto a las variables (r, t). Se puede
demostrar, que la cantidad de calor en la recta no cambia con el transcurso del
tiempo.
EJEMPLO. Resolver la ecuacin
0n
0t
= a
2
0
2
n
0r
2
n(r, t)[
|=0
= o(r) = n
0
, r
l
< r < r
2
,
Solucin:
n(r, t) = 1,(2a
_
t)
_
o
o
o(c)c
(or)
2
/do
2
|
dc = n
0
,(2a
_
t)
_
r2
rl
c
(or)
2
/do
2
|
dc
este resultado se puede llevar a la integral de probabilidad
o(.) = 2,
_
_
:
0
c
u
2
dn
4. ECUACIONES DIFERENCIALES PARABLICAS 107
haciendo
(r c)[
2o
_
T
= n , dc = 2a
_
tdn
n(r, t) = n
0
,
_
_
(rr2)/2o
_
|
(rrl)/2o
_
|
c
u
2
dn
= n
0
,
_
_
(rrl)/2o
_
|
0
c
u
2
dn n
0
,
_
_
(rr2)/2o
_
|
0
c
u
2
dn
n(r, t) = n
0
,
_
[o((r r1),2a
_
t) o((r r
2
),2a
_
t
108 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
5. Ecuaciones de tipo eliptco
Al estudiar los procesos estacionarios de distinta naturaleza fsica (oscilaciones,
conduccin de calor, difusin) se obtiene, por lo genera, ecuaciones de tipo elptico.
La ecuacin ms frecuente de este tipo es la ecuacin de Laplace, ^n = 0.
En el estudio de las propiedades de las funciones armnicas, se desarrollan
diferentes mtodos matemticos, que resultan fructferos tambien al aplicarlos a las
ecuaciones de tipo hiperblico y parablico.
5.1. Problemas que se reducen a la ecuacin de Laplace. CAMPOS
TERMICOS ESTACIONARIOS. Un campo trmico estacionario satisface la
ecuacin diferencial de la conduccin del calor n
|
= ^n.
Si el proceso es estacionario, se establece una distribucin de temperatura
n(r, j, .) que no vara con el tiempo, y por consiguiente satisface la ecuacin de
Laplace ^n = 0. Si hay fuentes de calor, se obtiene:
(5.1) ^n = )
donde ) es la densidad de las fuentes trmicas. La ecuacin (1) se denomina ecuacin
de Poissn.
La teora de las soluciones de la ecuacin de laplace se llama teora del potencial.
Las soluciones de la ecuacin ^n = 0 se conocen como funciones armnicas. El caso
bidimensional, cuando n slo depende de dos variables, se puede tratar de modo
ms conveniente con mtodos del anlisis complejo.
La ecuacin de Laplace se presenta en relacin con fuerzas gravitacionales. En
los cursos de Calculo de varias variables se discute el problema de la atracin de
dos cuerpos: Si una partcula de masa ' est en un punto (r
l
, j
l
, .
l
) y otra
partcula 1 de masa : se encuentra en un punto (r, j, .), entonces atrae 1 y
la fuerza gravitacional es el gradiente de la funcin escalar
n(r, j, .) =
c
r
, c = G:',
r =
_
(r r
l
)
2
(j j
l
)
2
(. .
l
)
2
esta funcin de r, j, . se llama potencial del campo gravitacional y satisface la
ecuacin de Laplace.
Ahora consideremos cierto volumen T, limitado por la supercie o. El problema
sobre la distribucin estacionaria de la temperatura n(r, j, .) dentro del cuepo T
se formula de la siguiente manera: Hallar la funcin n que satisface dentro de T la
ecuacin ^n = ), y las condiciones de frontera que pueden tomarse en una de las
formas siguientes,
n[
S
= q . Primer problema de contorno (Dirichlet)
Ju
Jn
[
S
= )
2
. Problema de Neuman (: es la normal exterior a o)
(n /
Ju
Jn
)[
S
= )
3
. Problema mixto.
CORRIENTE POTENCIAL DE UN LIQUIDO, POTENCIAL DE
UNA CORRIENTE ESTACIONARIA Y DE UN CAMPO ELECTRO-
STATICO
5. ECUACIONES DE TIPO ELIPTCO 109
Supongamos que dentro de cierto volumen T, de frontera o , tiene lugar la cor-
riente estacionaria de un lquido incompresible, que se caracteriza por la velocidad
\ (r, j, .).
Si la corriente del lquido es irrotacional, la velocidad \ es un vector potencial,
es decir, \ = \ n siendo n una funcin escalar llamada potencial de la velocidad.
Si no hay fuentes, di\ = 0 ;por lo tanto di(\n) = 0. Es decir, el potencial de la
velocidad satisface la ecuacin de Laplace.
CIERTAS SOLUCIONES PARTICULARES DE LA ECUACION
DE LAPLACE
Las soluciones de la ecuacin de Laplace, tiene un enorme inters, ya sea solu-
ciones con simetra esfrica o cilndrica, es decir, que dependen solo de una variable
r o j.
La solucin de la ecuacin de Laplace n = n(r) con simetra esfrica, se deter-
minar de la ecuacin diferencial ordinaria
J
J:
(
l
:
2
Ju
J:
) = 0 es la ecuacin de Laplace en coordenadas esfricas. Integrando
esta ecuacin hallamos n = c
l
l
:
c
2
. Si hacemos c
l
= 1, c
2
= 0, asi que n =
l
:
,
que se llama con frecuencia solucin fundamental de la ecuacin de Laplace en el
espacio.
Anlogamente haciendo n = n(j) , se halla la solucin con simetra cilndrica
o circular (en el caso de dos variables independientes) de la forma
n(j) = c
l
lnj c
2
, escogiendo c
l
= 1, c
2
= 0, tenemos n(j) = ln(
l
). Es
la solucin fundamental de la ecuacin de Laplace en el plano (para dos variables
independientes).
La funcin n(r) =
l
:
satisface ^n = 0 , en todas partes excepto del punto r = 0
donde se vuelve innita. Salvo el factor de proporcionalidad, sta coincide con el
campo de una carga puntual c, ubicada en el origen de coordenadas. El potencial
de este campo es n =
t
:
5.1.1. Ecuacin de Laplace en un rectanglo. 1. Se tiene una placa rectangu-
lar delgada OC1 (g 1). A travs del lado O se introduce calor uniformemente,
y por el O1 se saca, tambien uniformemente. Los dos lados restantes estn trmi-
camente aislados. Hallar la temperatura estacionaria en los puntos del interior de
la placa.
Para determinar la temperatura estacionaria se debe resolver el siguiente prob-
lema:
0
2
n
0r
2
0
2
n
0j
2
= 0 (5.2)
0n
0r
[
r=0
=
Q
//
;
0n
0r
[
r=o
= 0 (5.3)
0n
0j
[
=0
=
Q
/a
;
0n
0j
[
=b
= 0 (5.4)
en donde Q representa la cantida de calor que entra por O y sale por O1 y /
es el coeciente de conductividad trmica interna. Puede verse facilmente que la
solucin de este problema es la funcin
110 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
n(r, j) =
Q
2/a/
_
(j /)
2
(r a)
2
C
donde C es una constante.
2. Hallar la soplucin de la ecuacin de Laplace
J
2
u
Jr
2
J
2
u
J
2
= 0, en el rectngulo
1 : 0 _ r _ a, 0 _ j _ /, si toma en el permetro los siguientes valores:
n[
r=0
= q
o
(j), n[
r=o
= q
l
(j) (0 _ j _ /),
n[
=0
= /
o
(r), n[
=b
= /
l
(r) (0 _ r _ a),
con q
o
(0) = /
o
(0), q
o
(/) = /
l
(0), q
l
(0) = /
o
(a), q
l
(/) = /
l
(a).
La solucin del problema se puede dividir en dos partes;
1. determinacin de la funcin armnica n
l
(r, j) que satisface las condiciones
de frontera:
n
l
[
r=0
= q
o
(j), n
l
[
r=o
= q
l
(j) (0 _ j _ /),
n
l
[
=0
= 0, n
l
[
=b
= 0 (0 _ r _ a),
2. determinacin de la funcin armnica n
2
(r, j) que satisface las condiciones
de frontera
n
2
[
r=0
= 0, n
2
[
r=o
= 0 (0 _ j _ /),
n
2
[
=0
= /
o
(j), n
2
[
=b
= /
l
(j) (0 _ r _ a),
La funcin n(r, j) = n
l
(r, j) n
2
(r, j) ser entonces la solucin del problema
de Dirichlet planteado.
NOTA. Las funciones n
l
(r, j), n
2
(r, j) pueden ser halladas por el mtodo de
separacin de variables; esto es
n
l
(r, j) = A(r)1 (j)
5.2. Solucin del problema de Dirichlet en un circulo. Supongamos
que el plano Orj hay un crculo de radio 1 y centro en el origen de coordenadas. Sea
)(0) una funcin dada en la circunsferencia del crculo, donde 0 es el ngulo polar.
Es preciso hallar una funcin n(r, 0) continua en el crculo incluyendo el contorno,
que satisfaga en el interior del crculo la ecuacin de Laplace ^n = 0 , y sobre la
circunsferencia tome los valores n[
:=1
= )(0).
Escribiendo el Laplaciano en coordenadas polares:
^n =
1
r
0
0r
(r
0n
0r
)
1
r
2
0
2
n
00
2
= 0 (5.5)
n[
:=1
= )(0)., n[
:=0
acotada (5.6)
n(r, 0 2) = n(r, 0). (5.7)
5. ECUACIONES DE TIPO ELIPTCO 111
Busquemos la solucin de la forma
n = Q(r).T(0).
Entonces obtenemos
r
2
Q
"
(r).T(0) r.Q
t
(r).T(0) Q(r).T
"
(0) = 0.
Separando variables:
T
"
(0)
T(0)
=
r
2
Q
"
(r) rQ
0
(r)
Q(r)
Igualando cada una de las partes de la igualdad obtenida a -/
2
, obtenemos dos
EDO:
T
"
(0) /
2
T(0) = 0; r
2
Q
"
(r) rQ
0
(r) /
2
Q(r) = 0
De aqu para / = 0 obtenemos
T(0) =
o
1
o
0 (5.8)
Q(r) = C
0
1
o
lnr (5.9)
Si / 0, entonces
(5.10) T(0) = cos /0 + 1sin/0
y la solucin de la segunda ecuacin la buscaremos de la forma Q(r) = r
n
, lo que
nos da al reemplazaer en la EDO la ecuacin auxiliar r
2
:(:1)r
n2
r:r
nl
/
2
r
n
= 0, resolviendo tenemos : = /. Por lo tanto
(5.11) Q(r) = Cr
|
1r
|
La solucin debe ser una funcin peridica de T con periodo igual a 2 por
tanto, es evidente que en
( ) 1
o
= 0 y en la igualdad () / debe tomar uno d elos valores 1, 2, 8, ..(/ 0).
Adems la solucin es continua y nita en el crculo (r = 0) la solucin debe ser
nita y por eso se exige que 1
n
= 0. Asi que nosotros obtuvimos un conjunto
innito de soluciones particulares de la ecuacin (1), continuas en el crculo que
pueden ser escritas de la forma:
n
o
(r, 0) =
o
,2; n
n
(r, 0) = (
n
cos :0 1
n
sin:0)r
n
Cosntruyamos ahora la funcin
n(r, 0) =
o
2
o
n=l
(
n
cos :0 1
n
sin:0)r
n
que tambien es solucin de la ecuacin (1). Nos queda por dterminar las constantes
o
,
n
, 1
n
de tal forma que la funcin n(r, 0) satisfaga la condicin n[
:=1
= )(0),
esto es
)(0) =
o
2
o
n=l
(
n
cos :0 1
n
sin:0)1
n
112 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
Desarrollamos )(0) en una serie de Fourier en el intervalo [, [. Obteniendo
de aqu las frmulas
n(r, 0) =
l
2t
t
_
t
)(t)
1
2
:
2
1
2
21: cos(r0):
2
dt
(integral de Poisson)
o
=
1
_
t
t
)(:)d:,
n
=
1
1
n
_
t
t
)(:) cos ::d:
1
n
=
1
1
n
_
t
t
)(:) sin::d:
por lo tanto,
n(r, 0) =
1
_
t
t
)(:)[
1
2
o
n=l
(
r
1
)
n
cos :(: 0)[d:
5.3. Solucin de la ecuacin de Lapalce en un anillo. Se trata de
resolver el problema de Dirichlet para la ecuacin de Laplace ^n = 0 , en el interior
de una corona circular 1 _ r
2
j
2
_ 4. La funcin n satisface las condiciones
n[
r
2
2
=l
= )
l
(r, j), n[
r
2
2
=d
= )
2
(r, j).
ECUACION DE POISSON. A continuacin damos algunos ejemplos para
ilustrar la solucin de la ecuacin de Poisson ^n = )
EJEMPLO. Resolver la ecuacin ^n = 2, en el rectngulo 1 = (r, j)[
0 < r < a;
b
2
< j <
b
2
, sabiendo que en el permetro de 1 se reduce n a cero.
Solucin: Consideremos n = n, siendo la solucin de la ecuacin de
Poisson que satisface (0, j) = 0, (a, j) = 0, y como no depende de j, puede
expresarse en la forma = r
2
1r C, de donde (r) = r(a r) y n es la
solucin de la ecuacin de Laplace ^n = 0, n(0, j) = 0, n(a, j) = 0, n(r, /,2) =
r
2
ar, n(r, /,2) = r
2
ar. Resolviendo el problema por separacin de variables
obtenemos n(r, j).
EJEMPLO
Hallar la solucin de la ecuacin de Poisson ^n = 12(j
2
r
2
), en la corona
circular a _ r _ /,
si n[
:=o
= 0.
Ju
J:
[
:=b
= 0
ECUACION DE LAPLACE EN UN PARALELEPIPEDO
Hallar la distribucin del potencial de un campo electrosttico n(r, j, .) dentro
de un paraleleppedo rectangular de paredes conductoras, sabiendo que la base
inferior est cargada con un potencial n y que la superior como las caras laterales,
estn conectadas a tierra.
El problema puede ser resuelto encontrando la solucin del siguiente problema
de valor en la frontera.
5. ECUACIONES DE TIPO ELIPTCO 113
0
2
n
0r
2
0
2
n
0j
2
0
2
n
0.
2
= ^n = 0,
n(0, j, .) = 0, n(a, j, .) = 0
n(r, 0, .) = 0, n(r, /, .) = 0,
n(r, j, 0) = n, n(r, j, c) = 0,
Buscamos la solucin de la forma n(r, j, .) = \ (r, j)7(.).
Despus de la separacin de variables encontramos para \ (j, .) el problema de
contorno de valores propios
^\ = `\
\ (0, j) = 0, \ (a, j) = 0
\ (r, 0) = 0, \ (r, /) = 0
5.4. Funciones esfericas. Denicin: Se llama polinomio armnico a un
polinomio homogneo que satisfaga a la ecuacin de Laplace
J
2
u
Jr
2
J
2
u
J
2
J
2
u
J:
2
= 0.
Los dos primeros polinomios homogneos armnicos tienen la forma:
n
l
(r, j, .) = r 1j C.,
n
2
(r, j, .) = r
2
1j
2
(1).
2
Crj 1r. 1j.. donde , 1, C son
constantes arbitrarias.
Los polinomios armnicos homogneos se llaman funciones esferoidales.
La forma ms simple de introducir las funciones esfricas, es al resolver la
ecuacin de Laplace, para una esfera empleando el mtodo de separacin de vari-
ables.
Buscando la solucin de la ecuacin d eLaplace en las varaibles (r, 0, ,) :
(5.12) ^n =
1
r
2
0
0r
(r
2
0n
0r
)
1
r
2
sin0
0
00
(sin0
0n
00
)
1
r
2
sin
2
0
0
2
n
0,
2
= 0
haciendo
n(r, 0, ,) = 1(r)1 (0, ,).
Para la determinacin de 1(r) se obtiene la ecuacin de Euler
(5.13) r
2
1
"
(r) 2r1
0
(r) `1(r) = 0
y para la detrminacin de 1 (0, ,), la ecuacin
1
sin0
0
00
(sin0
01
00
)
1
sin
2
0
0
2
1
0,
2
`1 = 0 (5.14)
1 (0, , 2) = 1 (0, ,), (5.15)
[1 (0, ,)[ < , [1 (, ,)[ < (5.16)
Las soluciones acotadas de la ecuacin (14), que poseen segundas derivadas contin-
uas, se llaman funciones esfricas. Buscando la solucin de 1 (0, ,) en la forma:
1 (0, ,) = O(0)1(,).
Obtenemos las siguientes ecuaciones
114 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
1
"
(,) j1(,) = 0
1(, 2) = 1(,)
que tiene solucin slo cuando j = :
2
, : entero y las soluciones linealmente
independiente son las funciones cos :,, sin:,. La funcin O(0) se determina de la
ecuacin
1
sin0
d
d0
(sin0
dO
d0
) (
j
sin
2
0
`)O = 0
introduciendo la variable t = cos 0 y denotando A(t)[
|=cos 0
= A(cos 0) = O(0), se
obtiene, para A(t), la ecuacin de las funciones adjuntas
(5.17)
d
dt
[(1 t
2
)
dA
dt
) (
:
2
1 t
2
`)A = 0, 1 < t < 1
esta ecuacin admite soluciones acotadas solamente cuando ` = :(: 1) :
A(t) = [
|=cos 0
= 1
(n)
n
(t)[
|=cos 0
= 1
(n)
n
(cos 0) = O(0),
donde : _ :.
Las funciones esfricas de n-nismo orden son:
: = 0, 1
(o)
n
(0, ,) = 1
n
(cos 0),
: = 1, 1
(l)
n
(0, ,) = 1
(l)
n
(cos 0) cos ,, 1
(l)
n
(0, ,) = 1
(l)
n
(cos 0) sin,,
: = /, 1
(|)
n
(0, ,) = 1
(|)
n
(cos 0) cos /,, 1
(|)
n
(0, ,) = 1
(|)
n
(cos 0) sin/,
(/ = 1, 2, ...:). (5.18)
El nmero de funciones esfricas distintas de n-nismo orden 1
(n)
n
(0, ,) es igual a
2: 1. La combinacin lineal de estas 2: 1 funciones esfricas (18 )
1
(n)
n
(0, ,) =
n
n=0
1
(n)
n
(cos 0)(
nn
cos :, 1
nn
sin:,),
es tambin una funcin esfrica y se llama armnico esfrico.
Volvamos ahora a la determinacin de la funcin 1. Buscaremos la solucin en
la forma
1 = r
o
Susituyendo en la ecuacin (13), se obtiene la ecuacin auxiliar para la detrminacin
de c : c(c 1) :(: 1) = 0, por lo tanto: c = : y c = (: 1).
Por consiguiente, las soluciones particulares de la ecuacin de Laplace son las
funciones:
r
n
1
(|)
n
(0, ,), r
(nl)
1
(|)
n
(0, ,)
la primera de las cuales corresponde a la solucin de los problemas interiores, y la
segunda, a la de los exteriores.
PROPIEDADES DEL SISTEMA DE FUNCIONES ESFERICAS.
5. ECUACIONES DE TIPO ELIPTCO 115
1. Las funciones esfricas son ortogonales dos a dos en la esfera, esto es
_ _
`
1
(|1)
n
1
(|2)
n
d\ =
2t
_
0
t
_
0
1
(|1)
n
(0, ,)1
(|2)
n
(0, ,) sin0d0d, = 0, si /
l
,= /
2
2. El sistema de funciones esfricas. determinadas por la frmula (18) es completo,
es decir que cualquier funcin )(0, ,), con derivadas segundas continuas, se puede
aproximar uniformemente por cierto polinomio de funciones esfricas.
)(0, ,) =
o
n=0
n
n=0
1
(n)
n
(cos 0)(
nn
cos :, 1
nn
sin:,)
donde
nn
, 1
nn
son los coecientes de Fourier, que se determinan por las frmulas
nn
=
1
[[1
(n)
n
[[
2
_
2t
0
_
t
0
)(0, ,)1
(n)
n
(cos 0) cos :,sin0d0d, (5.19)
1
nn
=
1
[[1
(n)
n
[[
2
_
2t
0
_
t
0
)(0, ,)1
(n)
n
(cos 0) sin:,sin0d0d, (5.20)
donde
[[1
(n)
n
[[
2
=
2
n
2: 1
(: :)!
(: :)!
,
n
=
_
2 para : = 0,
1 para : 0.
EJERCICIOS
1. Hallar el potencial en el interior de la esfera 1 = 1, suponiendo que no
existen cargas en el interior y que el potencial sobre la supercie es )(0), donde:
a) )(0) = 1
b) )(0) = cos 0
c) )(0) = cos 20
2.Se tiene un cilindro de radio 1 y altura /. En las bases la temperatura es
de cero grados y en la supercie lateral es una funcin de .. Hallar la temperatura
estacionaria en los puntos interiores del cilindro.
3. La base inferior de un cilindro de radio 1 y altura / se mantiene a temper-
atura n
o
constante. la supercie lateral y la base superior se enfran libremente en
aire a cero grados. Hallar la distribucin estacionaria de la temperatura dentro del
cilindro.
4. Una esfera de radio 1 es calentada por un ujo planp-paralelo de calor de
densidad , incidente sobre su supercie, y a su vez enite calor al medio ambiente
segn la ley d eNewton. Hallar la distribucin estacionaria de la temperatura dentro
de la esfera.
5. Encontrar la distribucin estacionaria de temperatura en un sector homog-
neo (0 _ r _ a, 0 _ , _ c), que satisfaga las condiciones de valor de frontera:
n(r, 0) = n(r, c) = 0, n(a, ,) = , ( es una constante).
6. Encontrar la distribucin estacionaria de temperatura en un cilindro no
acotad d eradio 1, si sobre su sueprcie lateral o se conoce el ujo calorico
Ju
Jn
= cos
3
,.
116 3. ECUACIONES DIFERENCIALES EN DERIVADAS PARCIALES
7. Resolver el problema de Dirichlet para la ecuacin de Poisson en una esfera
de radio 1 con centro en el origen de coordenadas.
^n = r., dentro de la esfera,
n[
:=1
= 1.
Sugerencia. Buscar la solucin n(r, 0, ,) = (r, 0, ,) n(r), donde (r, 0, ,), n(r)
satisfacen los problemas
1
r
2
0
0r
(r
2
0
0r
)
1
r
2
sin0
0
00
(sin0
0
00
)
1
r
2
sin
2
0
0
2
0,
2
=
r
2
2
cos ,sin(20),
(1, 0, ,) = 0
1
r
2
d
dr
(r
2
n
t
) = 0, 0 < r < 1,
n(1) = 1, [n(0)[ <
CHAPTER 4
Solucin de problemas por diferencias nitas
1. Introduccin
Los mtodos analticos para la solucin de las ecuaciones en derivadas parciales
consisten en la representacin explcita de la solucin en forma de serie o de integral,
lo cual no siempre es posible; en general el mtodo de solucin de separacin de
variables no siempre se puede aplicar a cualquier tipo de ecuaciones. Estos mtodos
se discutirn en captulos posteriores.
Un mtodo universal de solucin es el mtodo de las diferencias nitas o mto-
dos de las mallas. Veamos en que consiste: la regin de variacin continua de los
argumentos (por ejemplo (r, t)), se sustituye por un conjunto nito de puntos (no-
dos), este conjunto lo llamaremos malla o red; ahora en lugar de las funciones de
argumento continuo denimos las funciones de argumento discreto denidas en los
nodos de la malla y las cuales las llamaremos funciones de malla. Las derivadas que
guran en la ecuacin diferencial se sustituyen (se aproximan) por los respectivos
cocientes de diferencias, es decir, combinaciones lineales de valores de la funcin de
malla en varios nodos de la red; asi que la ecuacin diferencial se transforma en
un sistema de ecuaciones en diferencias. Las condiciones iniciales y de contorno se
convierten en ecuaciones en diferencias para la funcin de malla.
Es natural exigir que el problema de contorno en diferencias obtenido de esta
manera tenga solucin y que su solucin se aproxime (converja) a la solucin del
problema original, al aumentar el nmero : de puntos de la malla.
1.1. Mallas y funciones de mallas. Supongamos que la regin de variacin
del argumento es el segmento 0 _ r _ 1. Dividamos este segmento mediante los
puntos r
I
= i/, i = 0, 1, ..., :, / 0, en : partes de longitud / =
l
n
cada una.
El conjunto \
|
= r
I
= i/, i = 1, ...: 1 se denomina una malla o red de
diferencias en 0 < r < 1; el valor / es la distancia entre dos nodos de \
|
, o paso
117
118 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
de la malla; el valor j
I
= j(r
I
) es la funcin de argumento discreto, o funcin de
malla denida en la red \
|
.
A cualquier funcin continua )(r) sobre el segmento [0, |[ se le hace correspon-
der la funcin de malla )
|
, haciendo por ejemplo, en algunos casos ()
|
)
I
= )(r
I
),
algunas veces se aproximara de la siguiente forma:
)
I
=
1
/
_
r1l
rIl
)(r)dr
Esta ltima aproximacin sobre la red se puede realizar no solo para funciones con-
tinuas, sino tambin para funciones con discontinuidades de salto nito.
Veamos algunas frmulas sencillas para aproximar las derivadas que aparecen en
las ecuaciones diferenciales. Denotaremos la derivada )
t
como 1) y la sustituiremos
por
1)
)
Il
)
I
/
= 1
|
)
I
Esta aproximacin recibe el nombre de diferencia hacia adelante. Al escribir 1) en
esta forma, se admite el error
1
|
)
I
(1))
I
= c
I
)
Il
)
I
/
)
t
(r
I
) = c
I
llamado error de aproximacin del operador 1 por el operador en diferencias 1
|
.
Cuando / 0 entonces es natural exigir que c
I
0.
Tambin podemos hablar de diferencia hacia atrs
1) 1
l
|
)
I
=
)
I
)
Il
/
y diferencia central
1)
1
|
)
I
=
)
Il
)
Il
2/
Para evaluar los errores c
I
se procede de la siguiente manera. Supngase que
) C
n
, donde : _ 2.
Desarrollemos )(r) en el punto r = r
I
en una serie de Taylor,
)(r) = )(r
I
) )
t
(r
I
)(r
I
r),1! O(r
I
r)
2
Por lo tanto
)(r) )(r
I
) )
t
(r
I
)(r
I
r) = O(r
I
r)
2
haciendo en la anterior ecuacin r = r
Il
,/ = r
Il
r
I
, tenemos
)
Il
)
I
)
t
(r
I
)/ = O(/
2
)
)
Il
)
I
/
)
t
(r
I
) = O(/)
por lo tanto si / 0 entonces
}1+1}1
|
)
t
0. En este caso se dice que el operador
1
|
aproxima al operador 1 con el primer orden.
Ejercicio 1. Demostrar que el operador en diferencia nitas central aproxi-
ma la primera derivada con el segundo orden. Asuma la suavidad necesaria de la
funcin ).
1. INTRODUCCIN 119
La segunda derivada 1
2
) = )
tt
no es posible expresarla con la ayuda de solo dos
puntos. Tomemos tres puntos r
I
, r
Il
, r
Il
y examinemos el siguiente operador
en diferencias nitas
1
2
|
)
I
=
)
Il
2)
I
)
Il
/
2
Supngase que ) C
n
, : _ 4, desarrollemos la funcin )(r) en el punto r
I
en
una serie de Taylor:
)(r) = )(r
I
) )
t
(r
I
)(r
I
r),1! )
tt
(r
I
)(r r
I
)
2
,2!
)
(3)
(r
I
r)
3
,8! O(r r
I
)
d
tomando en la anterior expresin r = r
Il
, y luego r = r
Il
y restando los corre-
spondientes resultados obtenemos
)
Il
)
Il
= 2)
I
/
2
)"
I
O(/
d
)
Asi que el error de aproximacin c
I
= 1
2
|
)
I
(1
2
))
I
= O(/
2
). En este casos se dice
que 1
2
|
) aproxima la segunda derivada de ) con el segundo orden. Es importante
aclarar que en realidad el orden de aproximacin del operador en diferencias nitas
1
2
|
depende del orden de diferenciabilidad de la funcin )(r). De hecho en todos
los casos hablamos de aquel orden mximo de aproximacin, el cual no cambia al
aumentar el nmero : de la clase C
n
.
1.2. Planteamiento de los problemas en diferencias. Aproximacin
y Convergencia. Se debe resolver la ecuacin diferencial n = ), es un
operador diferencial, con ciertas condiciones complemetarias (bien sea condiciones
iniciales o con valores en la frontera). Por lo tanto, adems de construir el operador
en diferencias, es necesario aproximar sobre la red \
|
el segundo miembro )(r) y
las condiciones complementarias, despues de lo cual es posible plantear el problema
en diferencias. Analicemos algunos ejemplos.
Para acotar la magnitud de la ecuacin de red \
|
, se puede emplear las sigu-
ientes normas:
|c|
o
= max [c(r)[
|c|
l
=
/c(r)
|c(r)|
2
=
_
/c
2
(r)
Donde / = / en el caso unidimensional; / = /
l
/
2
en el caso bidimensional, y
/ = /
l
/
2
.../
n
en el caso n-dimensional.
Veamos el siguiente problema de contorno:
(1.1) n"(t) c(t)n(t) = )(t); 0 < t < |
(1.2) n(0) = n(|) = 0
supngase que las funciones c(t), )(t) son funciones continuas en [0, |[; adems,
c(t) _ 0 en [0, |[.
120 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
Escribimos el problema (1) - (2) en forma operacional
(1.3) n = )
donde es un operador lineal, que acta en el espacio A = C
2
[0, |[ y dene
una expresin diferencial; esto es
n = n"(t) c(t)n(t).
La regin de denicin del operador , consta de las funciones de A, dos veces
derivables continuamente en [0, |[ y que satisface (2).
Dividimos [0, |[ en : partes iguales t
|
= //,
/ = 0, 1, . . . , : ; donde / =
l
n
; denimos el operador
T
n
n(t) = [n(t
|
)[
nl
|=l
= (n
|
)
nl
|=l
(columnas de altura :1), as que el vector [n(t
|
)[
nl
|=l
pertenece a un espacio
de dimensin nita, llamado espacio de red que se denotar como
A
n
. Denamos
la norma
|n| =
_
|
:
nl
|=l
[n
|
[
2
Cambiamos el operador de la segunda derivada por la diferencia:
n"(t) ~
n(t /) 2n(t) n(t /)
/
2
Escribimos en
A
n
el siguiente problema aproximado ( el esquema en diferencia)
(1.4)
n
|l
2n
|
n
|l
/
2
c
|
n
|
= )
|
, / = 1, 2, . . . , : 1
(1.5) n
0
= n
n
= 0
aqu
()
|
)
nl
|=l
= T
n
), (c
|
)
nl
|=l
= T
n
c
podemos escribir (4) - (5) en la siguiente forma
(1.6)
|
n
n
=
)
n
donde :
)
n
= T
n
)
|
=
_
_
_
_
_
_
_
_
_
_
_
_
2
|
2
c
l
l
|
2
0 0 0 ... 0
l
|
2
2
|
2
c
2
l
|
2
0 0 ... 0
. . . . .
. . . . .
. . . . .
. . .
l
|
2
. . .
l
|
2
. . .
l
|
2
2
|
2
c
nl
_
_
_
_
_
_
_
_
_
_
_
_
Veamos la condicin de aproximacin. Tenemos
1. INTRODUCCIN 121
^
2
n
= [[
n
T
n
n T
n
n[[ =
=
|
:
n
I=l
[
n(t
Il
) 2n(t
I
) n(t
Il
)
/
2
c
I
n(t
I
) n"(t
I
) c
I
n(t
I
)[
2
=
|
:
nl
I=l
[n"(t
I
)
n(t
Il
) 2n(t
I
) n(t
Il
)
/
2
[
2
Supongamos ahora que la solucin n(t) del problema (1) - (2), es cuatro veces
derivable en (0, |); adems
d
= sup
(0,l)
[n
(d)
(t)[ <
por la frmula de Taylor
n(t
|l
) =
3
I=0
n
(I)
(t
|
)
i!
/
I
n
(d)
(
|
)
24
/
d
n(t
|l
) =
3
I=0
(1)
I
n
(I)
(t
|
)
i!
/
I
n
(d)
(
t
|
)
24
/
d
donde:
|
(t
|
, t
|l
);
t
|
(t
|l
, t
|
)
De esta manera, tenemos la siguiente acotacin
^
2
n
=
|
:
nl
|=l
[ /
2
[
n
(d)
(
|
)
24
n
(d)
(
t
|
)
24
[ [
2
_ (
d
12
)/
2
|
De esta manera
|
|
T
n
n T
n
n| = O(/
2
)
El orden de aproximacin es igual a dos.
Segundo ejemplo
(1.7) n" = )(r), 0 < r < 1, n
t
(0) = /n(0) q
0
, n(1) = q
l
Sobre la red uniforme \
t
|
la ponemos en correspondencia con los problemas en
diferencias, (aqu por comodidad hemos introducido la funcin de red j
I
que es la
aproximacin de n(r
I
)
Problema 1.
ji 1 2j
I
j
Il
/
2
=
)
I
, i = 1, 2, ..., 1
j
l
j
o
/
= /j
o
q
o
, j
= q
l
Problema 2.
ji 1 2j
I
j
Il
/
2
= )
I
, i = 1, 2, ..., 1
j
l
j
o
/
= /j
o
(q
o
/
2
)(0)), j
= q
l
122 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
Dejando por ahora las cuestiones de solubilidad de los problemas 1 y 2, veamos
el error de aproximacin.
c
I
=
|
n
I
)
I
=
n
Il
2n
I
n
Il
/
2
)(r
I
) = n" )(r
I
) O(/
2
)
= O(/
2
)
El error de aproximacin de la condicin de frontera en el punto r = 0 para 1 es:
c
o
=
n
l
n
o
/
/n
o
q
o
= n
t
(0) /n(0) q
o
O(/) = O(/)
Asi que podemos decir que el esquema en diferencia nita 1 aproxima al problema
(7) en el interior de la malla con segundo orden de aproximacin y en frontera con
primer orden.
Veamos ahora para el esquema 2. Respecto a la ecuacin todo queda igual;
veamos en la frontera
c
o
=
n
l
n
o
/
/n
o
q
o
/
2
)(0) =
n
t
(0)
/
2
n"(0) /n(0) q(0)
/
2
)(0) O(/
2
)
= [n
t
(0) /n(0) q
o
[
/
2
[n"(0) )(0)[ O(/
2
) = O(/
2
)
En este caso tanto el error de aproximacin en el interior de la malla como en la
frontera es igual a dos. La elevacin del orden de aproximacin est unida a la
forma como nosotros aproximemos la condicin de frontera.
En forma en general si tenemos el problema
n = )(r), r \ (1.8)
t
n = q(r), r 0\ (1.9)
y lo aproximamos en cierta red de diferencias por
|
j = )
|
(r), r \
|
(1.10)
t
|
j = q
|
(r), r \
t
|
(1.11)
siendo \
t
|
la red en la frontera de \,entonces se dice que el problema en diferencias
(10)-(11) aproxima al problema (8)-(9) con orden : en la solucin n, si existen las
constantes positivas
/, '
l
y '
2
tales que para / <
/ tiene lugar
|
|
(n)
|
)
|
| _ '
l
/
nl
l
(1.12)
|
t
|
(n)
|
q
|
| _ '
2
/
n2
2
(1.13)
donde : = min(:
l
, :
2
).
Se dice que la solucin del problema (10)-(11) converge a la solucin del prob-
lema diferencial, si
|j n| 0, / 0
1. INTRODUCCIN 123
1.3. Mtodo en diferencia nitas para la ecuacin de propagacin
del calor. Veamos ahora una malla bidimensional. Sea Q
T
= (r, t); 0 < r <
1, 0 < t < T hagamos una particin del rectngulo 1
t
.
El conjunto de nodos \
t
|
= (r
I
, t
) : r
I
= i/t
= ,t, i = 1, 2, ..', , =
1, 2, ... es una malla en el rectngulo Q
T
.
Observacin 1. Pueden existir mallas no uniformes llamadas mallas irregu-
lares, esto es, con pasos diferentes.
Denimos la funcin de red en \
t
|rr
como:
n
I
= n(r
I
, t
)
Sea
1
c
2
0n
0t
=
0
2
n
0r
2
)(r, t) (1.14)
n(0, t) = a(t), n(1, t) = /(t) (1.15)
n(r, 0) = q(r), (1.16)
donde a, /, ) son funciones suaves, c es una constante.
Sea Q
T
= (r, t)[0 _ r _ 1, 0 _ t _ T la regin de denicin de la ecuacin
(16). Dividamos el segmento [0, 1[ en : intervalos de longitud / = 1,:, sea la red
.
|
= r
|
= //, / = 1, 2, ..., : 1.
Entonces
1
c
2
0n(r
|
, t)
0t
=
n(r
|l
, t) 2n(r
|
, t) n(r
|l
, t)
/
2
)(r
|
, t)
n(r
l
, t) = a(t), n(r
, t) = /(t)
n(r
|
, 0) = q(r
|
)
124 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
Introduciendo la notacin
0n(r
|
, t)
0t
=
dn
|
dt
, obtenemos:
1
c
2
dn
|
dt
=
n
|l
(t) 2n
|
(t) n
|l
(t)
/
2
)
|
(t) / = 1, 2, ..: 1 (1.17)
n
l
(t) = a(t), n
(t) = /(t) (1.18)
n
|
(0) = q
|
/ = 0, 1, 2, ..: (1.19)
O en forma vectorial
1
c
2
dn
dt
= n
n(0) = q
|
/ = 0, 1, 2, ..:
donde A es una matriz positiva y (t),n(t) funciones vectoriales denidas para todo
t,
dn
dt
= (
dn
l
dt
dn
2
dt
...
dn
|l
dt
)
Hacemos las condiciones de contorno homogneas as:
|
=
_
_
_
)
l
a(t),/
2
si / = 1
)
|
(t) / = 2, 8, ..., : 2
)
/(t),/
2
/ = : 1
Luego:
1
c
2
dn
|
dt
=
n
|l
(t) 2n
|
(t) n
|l
(t)
/
2
|
(t) / = 1, 2, ..: 1 (1.20)
n
o
= 0, n
n
= 0 (1.21)
n
|
= q
|
cuando t = 0 (1.22)
Este problema est denido solamente en los puntos r
l
, r
2
, ..., r
nl
.
Ahora resolvemos este sistema de ecuaciones diferenciales ordinarias. Integran-
do cada ecuacin (22) con respecto a t en el intervalo t
_ t _ t
l
, obtenemos:
(1.23)
n
l
|
n
|
t
=
n
t
|l
2n
t
|
n
t
|l
/
2
t
|
donde: t =
c
2
^t
n
t
|
=
c
2
^t
_
|+1
|
n
|
dt (1.24)
t
|
=
c
2
^t
_
|+1
|
|
dt (1.25)
n
|
= n
|
(t
) (1.26)
1. INTRODUCCIN 125
Obtendremos diferentes ecuaciones en diferencias de acuerdo a la aproximacin
que utilicemos para las integrales; las cuales pueden ser:
1
^t
_
|+1
|
n
|
n
|
(1.27)
1
^t
_
|+1
|
n
|
n
l
|
(1.28)
1
^t
_
|+1
|
n
|
1
2
(n
|
n
l
|
) (1.29)
por lo tanto obtenemos bien sea un esquema de triangulacin explcita:
(1.30)
n
l
|
n
|
t
=
n
|l
2n
|
n
|l
/
2
|
con error de truncamiento local igual a O(t /
2
); o en forma implcita:
n
l
|
n
|
t
=
n
l
|l
2n
l
|
n
l
|l
/
2
l
|
o un esquema Crank-Nicolson
(1.31)
n
l
|
n
|
t
=
n
l
|l
2n
l
|
n
l
|l
2/
2
n
|l
2n
|
n
|l
2/
2
l
|
|
2
Las condiciones de frontera seran
(1.32) n
0
= 0, n
= 0, n
0
|
= q
|
El esquema (32) explcitamente se resuelve con respecto a la incgnita n
l
|
:
n
l
|
= n
|
j(n
|l
2n
|
n
|l
) t
|
(1.33)
n
o
= n
n
= 0, n
o
|
= q
|
(1.34)
Escribiendo el sistema anterior en forma vectorial obtenemos,
n
l
n
t
= n
(1.35)
n
l
= Tn
to
(1.36)
donde j =
t
/
2
; T = 1 ;o = 1 , 1 es la matriz identidad y
=
_
_
1 2j j 0 0 . . . 0
j 1 2j j 0 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . j 1 2j
_
_
y n
es el vector
n
=
_
_
n
l
n
2
.
.
.
n
nl
_
_
126 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
El esquema (33) tiene una solucin ms compleja:
n
l
|l
(2
1
j
)n
l
|
n
l
|l
=
1
j
n
|
/
2
l
|
(1.37)
n
l
o
= 0, n
l
= 0 (1.38)
en notacin de operadores es
n
l
= (1 )
l
n
t(1 )
El esquema de resolviendo (32) y (33) respecto a n
l
; podemos escribirlo de
la forma
n
l
= tn
t:)
; donde t se llama operador de paso y : operador de la fuente.
Puede facilmente verse que T = 1tA, : = 1 para (32) y T = (1tA)
l
, : = T
para (33). Para el esquema de Crank-Nicolson
T = (1
r
2
:)
l
(1
r
2
:)
: = (1
r
2
:) 1 es el operador identidad.
Veamos un ejemplo sencillo que nos permite ver la bondad del mtodo expuesto.
Considere la ecuacin de calor
0n
0t
(r, t)
0
2
n
0r
2
(r, t) = 0, 0 < r < 1, 0 < t, (1.39)
n(0, t) = n(1, t) = 0, 0 < t; (1.40)
n(r, 0) = sinr, 0 _ r _ 1 (1.41)
Se puede observar que la funcin n(r, t) = c
t
2
|
sinr es solucin del problema
( )-( )
Resolvamos ahora el problema ( ),( ) a travs de las ecuaciones en diferencias
nitas, para esto utilicemos el modelo ( ). En el momento t = 0, con pramentros
/ = 0,1, t = 0,000, asi que j = 0,0, tambien hagamoslo para / = 0,1, t = 0,01,
asi que j = 1
.
l
= .
|
(1 2(0,0)) 0,0(.
|l
.
|l
) 0,000q
|
)
donde .
|
n
|
, y
(1.42)
|
=
_
a(t),/
2
:i / = 1
/(t),/
2
/ = 1
q
|
= 1,0,000
_
|l
|
|
dt = 0 , ya que a(t) = 0 , /(t) = 0.
Desarrollando la ecuacin en diferencias cuando / = 1, , = 0:
.
l
l
.
0
l
(0,0) 0,0(.
o
o
.
o
2
)
Calculando
.
o
l
= sin(0,1) = sin(0,1) = 4,0 + 10
3
.
o
o
= sin0 = 0, .
o
2
= sin(0,2),
as sucesivamente se evala cada una de las las. Los resultados para t = 0, se
deben llenar en la tabla que aparece abajo y se deben comparar con la solucin
exacta para t = 0,.
1. INTRODUCCIN 127
n
I,l000
n
I,50
r
I
n(r
I
, 0,) / = 0,000 / = 0,01
0 0 0 0
0.1 0.00222241 0.00228652 8.19876x10
7
0.2 0.00422728 0.00434922 -1.55719x10
S
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.4. Estabilidad. Un esquema de diferencias nitas se llama estable si er-
rores pequeos que entran durante el proceso de solucin, se van extinguiendo al
crecer ilimitadamente el nmero de las o al menos permanecen pequeos; en caso
contrario el esquema de clculo se llama inestable.
Es evidente que un esquema de diferencias nitas inestable no es apropiado para
el clculo, ya que errores pequeos inevitables pueden dar lugar a una desviacin
grande entre la solucin de la aproximacin y la solucin exacta del problema inicial.
Conviene subrayar lo siguiente: El error de aproximacin se considera NO SO-
BRE UNA RED FIJA, sino en una sucesin de redes \
|
, donde / es una
sucesin de parmetros /
l
, /
2
, ..., /
n
, .. que tienden hacia cero. Para acotar la con-
vergencia del esquema se debe investigar la convergencia de la sucesin \
|
= j
|
n
|
,
/ 0 , para n
|
que es la proyeccin de la solucin exacta n = n(r) del problema
original y j
|
es la solucin del problema en diferencias nitas.
Si se tiene un esquema
(1.43)
|
j
|
=
)
|
(r) 1
t
|
j
|
= q
|
(r)
que aproxima a cierta ecuacin diferencial
(1.44) n = )(r), 1
t
n = q(r),
y su error de aproximacin es
(1.45) c
|
=
|
n
|
)
|
c
J
!
=
t
|
n
|
q
|
,
Supngase que j
l|
, j
2|
son soluciones del problema en diferencias con segundos
miembros
)
l|
, q
l|
,
)
2|
, q
2|
respectivamente; el esquema se llama estable, si existen
constantes positivas c
l
, c
2
, /
o
, independientes de la red \
|
y de la eleccin de los
segundos miembros, tales que [/[ _ /
o
, se cumple la desigualdad
(1.46) |j
2|
j
l|
| _ c
l
|
)
2|
)
l|
| c
2
|q
2|
q
l|
|
La estabilidad del esquema en diferencias signica que la solucin j
|
del problema
original depende uniformemente de / sin discontinuidades de los segundos miembros
(o sea de los datos de entrada)
)
|
, q
|
.
Si el esquema es lineal entonces, j
|
= 0 si
)
|
= q
|
= 0. Tomando j
l|
=
)
|
,q
l|
= q
|
, j
2|
= 0,
)
2|
= 0, q
2|
= 0 , vemos que la estabilidad del esquema lineal
signica el cumplimiento de la acotacin |j
|
| _ c
l
|
)
|
| c
2
|q
|
|.
128 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
Si el esquema es estable no es difcil obtener la acotacin del error de la solucin
de \
|
(r) = j
|
(r)n
|
(r) donde j
|
es la solucin de
|
j
|
=
)(r),
t
|
j
|
= q
|
(r) ,
y n = n(r) es la solucin del problema diferencial mediante el error de aproximacin
c
|
=
|
n
|
)
|
, c
J
!
=
t
|
n
|
q
|
.
Teorema 1. Supngase que se tiene el esquema en diferencias nitas (1) el
cual aproxima las ecuaciones originales (2) en la solucin n con orden :.
(2)
|
,
t
|
son operadores lineales
(3). El esquema (1) es estable; es decir existen las constantes positivas
/, C
l
, C
2
tales que \/ <
/ existe una nica solucin j del problema (2) que satisface la
desigualdad
|j| _ C
l
|)
|
| |q
|
|.
Entonces la solucin j del problema en diferencias nitas converge hacia la solucin
n del problema (2), esto es
lim|(n)
|
j| = 0.
Adems tiene lugar la siguiente cota de velocidad de convergencia
|(n)
|
j| _ (C
l
'
l
C
2
'
2
)/
n
.
Veamos ahora la estabilidad para la ecuacin del calor discutida arriba.
El error de truncamiento local es de orden O(t /
2
) para / = 0,1 y t = 0,00;
t /
2
= 1,0 + 10
d
. Esto no es cierto para el caso de nuestro ejemplo cuando
/ = 0,1 y t = 0,01; para explicar este fenmeno consideremos la la estabilidad del
mtodo de diferencia hacia adelante: si el error c
0
= (c
0
l
, ..., c
0
nl
) , est hecho en
representacin del dato inicial q
0
(arbitrario), un error de c
0
podra ser propagado
a .
l
ya que .
l
= [.
0
c
0
[ = .
0
c
0
; donde .
= (.
l
, .
2
, ..., .
nl
)
T
.
Este proceso lo podemos continuar hasta el paso n, el error en .
n
ser
n
c
0
.
Por consiguiente el mtodo es estable si y solamente si esos errores no crecen
a medida que : aumente, esto es, si y solamente si |
n
c
0
| _ |c
0
| para todo :.
Esto implica que |
n
| _ 1, por lo tanto el radio espectral j(
n
) = [j()[
n
_ 1. El
mtodo en diferencias hacia adelante, por esta razn puede ser estable solamente si
:j() _ 1.
Para determinar el radio espectral de , calculemos los valores caractersti-
cos de ; en este caso, `
I
= 1 4j[:c:(i,2:)[
2
para cada i = 1, 2, ..., : 1
(Demostrar).
La condicin para la estabilidad se reduce consecuentemente a determinar si:
1. INTRODUCCIN 129
j() = max
I
[1 4j[sin(i,2:)[
2
[ _ 1
1 _ 1 4j[sin(i,2:)[
2
_ 1
0 _ 4j[sin(i,2:)[
2
_ 2
max
I
sin(i,2:) = sin(:1,2:) = sin(1 1,:),2 =
sin(,2 ,2:) = cos ,2:
entonces
0 _ j() = jco:
2
(
2:
) _
1
2
.
Asi que la estabilidad se da si j _ 1,2; por lo tanto la desigualdad requiere
que se seleccionen / y t de modo que
t
/
2
_
1
2
. En nuestro ejemplo, esto se cumple
cuando / = 0,1 y t = 0,000.
130 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
1.5. Mtodo en diferencia nitas para las ecuaciones elipticas. Con-
sideremos la ecuacin de Laplacce
0
2
n
0r
2
0
2
n
0j
2
= 0, (r, j) Q (1.47)
n
JQ
= )(r, j) (1.48)
donde Q = (r, j)[0 < r < , 0 < j < 1 y 0Q es la frontera de Q.
Introduciendo una red en Q y reemplazando las segundas derivadas parciales
por sus correspondientes ecuaciones en diferencias obtenemos el siguiente problema
discreto
(1.49)
.
Il,|
2.
I,|
.
Il,|
/
2
l
.
I,|l
2.
I,|
.
Il,|l
/
2
2
= 0,
i = 1, 2, .. 1, / = 1, 2, ..' 1 y .
I,|
= )
I,|
, i = 0, 1, 2, .., / =
0, 1, 2.., '.Donde /
l
=
.
, /
2
=
1
1
Podemos reescribir las ecuaciones de frontera
de la siguiente forma
.
I,0
= )
I,0
, .
I,1
= )
I,1
, i = 0, 1, 2, ......, (1.50)
.
0,|
= )
0,|
, .
,|
= )
,|
, / = 0, 1, 2, ......, ' (1.51)
Si reemplazamos j =
|1
|2
, la ecuacin (12) se convierte en:
(1.52) j
2
.
Il,|
j
2
.
Il,|
.
I,|l
.
I,|l
2(1 j
2
).
I,|
= 0
Cuando j = 1 , o sea cuando tenemos una participacic/n igual a lo horizontal y
a lo vertical, tenemos:
.
Il,
.
Il,
.
I,l
.
I,l
4.
I,
= 0.
Si queremos evaluar el error cometido al hacer esta sustitucin, utilizamos la
frmula de Taylor:
)(r /
l
, j /
2
) = )(r, j) (/
l
0
0j
/
2
0
0j
))(r, j) 1,2!(/
l
0
0j
/
2
0
0j
)
2
)(r, j) ....
1,:!(/
l
0
0j
/
2
0
0j
)
n
)(r 0/
l
, j 0/
2
)
donde 0 < 0 < 1. Para nuestro caso tenemos:
n(r /, j) = n(r, j) /n
r
1,2!/
2
n
rr
1,8!/
3
n
rrr
1,4!/
d
n
t
rrrr
n(r /, j) = n(r, j) /n
r
/
2
,2!n
rr
1,8!/
3
n
rrr
/
d
,4!n
t
rrrr
n(r, j /) = n(r, j) /n
/
2
,2!n
1,8!/
3
n
/
d
,4!n
t
n(r, j /) = n(r, j) /n
/
2
,2!n
1,8!/
3
n
/
d
,4!n
tt
donde n
r
, n
, etc, son los valores de las derivadas en el punto (r, j), y n
t
rrrr
,
n"
rrrr
las derivadas de la funcin en puntos intermedios determinados.
Si sumamos estas ecuaciones obtenemos:
n(r/, j)n(r/, j)n(r, j/)n(r, j/) = 4n(r, j)/
2
(n
rr
n
)1
|
(r, j)
con 1
|
(r, j) = /
d
,4!(n
t
rrrr
n"
rrrr
n
t
n"
)
para n C
d
. El esquema es entonces de orden O(/
2
).
1. INTRODUCCIN 131
Ejercicio 2. Consideremos el problema de la determinacin de la distribucin
de temperatura en una lmina de metal delgado en forma de un cuadrado con di-
mensiones 0, : r 0, :, el cual est sometida a 0 grados celsius en las dos fronteras
adyacentes, mientras el calor en las otras fronteras se incrementa linealmente de
0 grados celsius de una esquina a 100 grados celsius donde esos lados se encuentran.
Solucin 1. Si colocamos los lados con las condiciones de frontera cero a lo
largo de los ejes r, j, el problema puede expresrse matemticamente
(1.53)
0
2
n
0r
2
0
2
n
0j
2
= 0 (r, j) 1
donde 1 = (r, j) 0 < r < 0,, 0 < j < 0,, con las condiciones de frontera:
(1.54) n(0, j) = 0, n(r, 0) = 0, n(r, 0,) = 200r, n(0,, j) = 200j
Si : = : = 4 la ecuacin en diferencias es
(1.55) 4n
I,
n
Il,
n
Il,
n
I,l
n
I,l
0
para cada i = 1, 2, 8;, = 1, 2, 8.
Expresando la ecuacin en trminos de la reclasicacin de los puntos interiores
de la red, \
I
= n(1i), tenemos:
4\
l
\
2
\
d
= \
0,3
\
l,d
4\
2
\
3
\
l
\
5
= \
2,d
4\
3
\
2
\
6
= \
d,3
\
3,d
4\
d
\
5
\
l
\
7
= \
0,2
4\
5
\
6
\
d
\
2
\
S
= 0
4\
6
\
5
\
3
\
9
= \
d,2
4\
7
\
S
\
d
= \
0,l
\
l,0
4\
S
\
9
\
7
\
5
= \
2,0
4\
9
\
S
\
6
= \
3,0
\
d,l
132 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
La reclasicacin de los puntos interiores consiste en lo siguiente: Denotemos como
1
|
= (r
I
, r
), \
|
= \
I,
donde / = i (:1,)(:1) para cada i = 1, 2, ..., :
1,, = 1, 2, ..., :1.
Entonces con : = 4,: = 4,/ = 1 (4 1 1)(4 1) = 7 si i = 1 y , = 1. si
i = 2, , = 1,/ = 2 (4 1 1)(4 1) = 8. Y as sucesivamente.
La parte derecha de las ecuaciones se obtiene de las condiciones de frontera:
\
l,0
= \
2,0
= \
3,0
= \
0,l
= \
0,2
= \
0,3
= 0
\
l,d
= \
d,l
= 2; \
2,d
= \
d,2
= 0; \
3,d
= \
d,3
= 7.
El sistema lineal asociado con este problema tiene la forma:\ = / donde
abajo aparecen la matriz , el vector de incognitas \ y el vector de trminos
independientes respectivamente.
_
_
4 1 0 1 0 0 0 0 0
1 4 1 0 1 0 0 0 0
0 1 4 0 0 1 0 0 0
1 0 0 4 1 0 1 0 0
0 1 0 1 4 1 0 1 0
0 0 1 0 1 4 0 0 1
0 0 0 1 0 0 4 1 0
0 0 0 0 1 0 1 4 1
0 0 0 0 0 1 0 1 4
_
_
y
_
_
\
l
\
2
\
3
\
d
\
5
\
6
\
7
\
S
\
9
_
_
_
_
2
0
10
0
0
0
0
0
2
_
_
Los valores de \
l
, ..., \
9
se encuentran aplicando el mtodo de Gauss-Seidel
(por ejemplo).
Ejercicio Determine la solucin del sistema y compare con la solucin exacta
de la ecuacin diferencial n(r, j) = 400rj.
a) A
l
j =
l
|1
_
10
|1
03
|1
_
; /
l
=
|1|1
2
A
2
j =
l
|
2
2
(j
2
2j
0
j
d
)
b) A
l
j =
l
|1
_
10
|1
03
|1
_
A
2
j =
l
|2
_
20
|2+
04
|2
_
; /
2
= (/
2
/
2
)
En forma general
Aj ) = 0, r c
0
n
A
+
j ) = 0, r c
:
n
j = q(r), r
n
1. INTRODUCCIN 133
c
0
n
es el conjunto de nodos regulares
c
:
n
es el conjunto de
134 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
1.6. Mtodo en diferencia nitas para la ecuacin de onda. Sea la
ecuacn de onda unidimensional
0
2
n
0r
2
0
2
n
0t
2
= 0 (1.56)
n(0, t) = n(1, t) = 0, t 0, n(r, 0) = )(r), 0 _ r _ 1 (1.57)
0n
0t
(r, 0) = q(r) (1.58)
Sea \ el rectngulo 0 _ r _ 1, 0 _ t _ T; construyamos una malla .
|r
donde
/ = 1,:, t = 1,T.
Denotemos r
I
= i/, i = 0, 1, ...., '. t
= ,/, , = 0, 1, ....,
El esquema de diferencias lo obtenemos utilizando el cociente de diferencias
centrado para la segunda derivada:
0
2
n
0t
2
(r
I
, t
)
n(r
I
, t
l
) 2n(r
I
, t
) n(r
I
, t
l
)
t
2
0
2
n
0r
2
(r
I
, t
)
n(r
Il
, t
) 2n(r
I
, t
) n(r
Il
, t
)
/
2
Asi que
n
l
I
2n
I
n
l
I
a
2
n
Il
2a
2
n
I
a
2
n
Il
= 0
donde a =
r
|
Resolviendo para
n
l
I
= 2(1 a
2
)n
I
a
2
(n
Il
n
Il
) n
l
I
i = 1, 2, ...., :1, , = 1, 2, ......, : 1.
Las condiciones de frontera estan dadas por
n
0
I
= )(r
I
)
n
l
I
= )
I
tq
I
r
2
2
(
}112}1}
2
1
l
|
2
)
n
o,
= )(r
I
), i = 1, 2, ....., :1.
Escribiendo este conjunto n
|
de ecuaciones en forma matricial obtenemos:
n
l
= n
n
l
donde los vectores n
y la matriz se representa abajo respectivamente.
_
_
2(1 a
2
) a
2
0 0 . . . 0
a
2
2(1 a
2
) a
2
0 . . . 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . . . . . . . . . . . a
2
2(1 a
2
)
_
_
y n
es el vector
_
_
n
l
n
2
.
.
.
n
nl
_
_
1. INTRODUCCIN 135
Necesitamos obtener el valor de n
I
y n
l
I
1 para poder calcular n
l
I
. Para es-
to empleamos la primera y segunda condicin inicial: n
I,o
= )(r
I
) , y utilizando
aproximacic/n hacia adelante
0n(r
I
, 0)
0t
=
n
l
I
n
o
I
t
= (r
I
)
n(r
I
, t
l
) = t(r
I
) )(r
I
)
n
I,l
= t
I
)
I
obteniendo de esta forma la solucin del esquema en diferencias para cualquier
paso del tiempo, en forma explcita, y se puede ver que ser estable si a < 1.
Observacin: Desarrollando la solucin n(r, t) es una serie de Taylor. El es-
quema en diferencias (28) se aproxima al problema original con segundo orden
respecto a / y t.
Mtodo de Deslizamiento.
Escribamos un mtodo simple y comodo para resolver un problema en diferen-
cias nitas. Sea
a
n
n
nl
/
n
n
n
c
n
n
nl
= )
n
, 0 < : < (1.59)
n
o
= q, n
= G (1.60)
Escribamos la ecuacin n
o
= q en la forma
n
o
= 1
l/2
n
l
1
l/2
,
donde 1
l/2
= 0 y 1
l/2
= q. De la ecuacin
a
l
n
o
/
l
n
l
c
l
n
2
= )
l
,
cuando : = 1 despejemos n
l
y con la ayudad de la igualdad n
o
= 1
l/2
n
l
1
l/2
tenemos
n
l
= 1
3/2
n
o
1
3/2
introduciendo las representaciones
1
3/2
=
c
l
/
l
, 1
3/2
=
a
l
q )
l
/
l
de la ecuacin
a
2
n
l
/
2
n
2
c
2
n
3
= )
3
,
y de la representacin para n
l
obtenemos una forma explicita para n
2
n
2
= 1
5/2
n
3
1
5/2
El proceso anterior de despeje se puede continuar para : = 8, 4... Reemplazando
n
nl
= 1
nl/2
n
n
1
nl/2
en la ecuacin
a
n
n
nl
/
n
n
n
c
n
n
nl
= )
n
,
obtenemos
n
n
=
c
n
/
n
a
n
1
nl/2
n
nl
)
n
a
n
1
nl/2
/
n
a
n
1
nl/2
136 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
De aqui obeservamos que los coecientes obtenidos en el proceso de despeje de la
relacin
n
n
= 1
nl/2
n
nl
1
nl/2
se calculan por las frmulas recurrentes
1
nl/2
=
c
n
/
n
a
n
1
nl/2
, 1
nl/2
=
a
n
1
nl/2
)
n
/
n
a
n
1
nl/2
Por lo tanto de las ltimas relaciones obtenidas tenemos
n
l
= 1
l/2
n
1
l/2
;
ya que n
= G podemos determinar n
l
y asi sucesivamente.
1.7.
1. INTRODUCCIN 137
Operadores en diferencias. El mtodo de los operadores en diferencias esta
basado en la manipulacin simbolica. Priemro se denir los operadores que actan
sobre los puntos de la red, como sigue:
desplazamiento: 1
n
n
I
= n
In
Forward: c
n
I
= n
Il
n
I
= 1 1
backward: c
n
I
= n
I
n
Il
= 1 1
l
semi-central: cn
I
= n
Il/2
n
Il/2
= c = 1
1
2
1
1
2
central:
cn
I
=
1
2
(n
Il
n
Il
) =
c =
1
2
_
1 1
l
_
promedio: j
I
=
1
2
_
n
Il/2
n
Il/2
_
= j =
1
2
_
1
1
2
1
1
2
_
derivada: 1n
I
=
0n
0r
(r
I
)
La manipulacin algebrica es inmediata, y es como sigue:
c
2
= c
= (1 1) (1 1) = 1
2
21 1
y similarmente jc =
c,etc. Tambin se puede escribir la expansin de la serie de
tiempo en forma de operadores. Veamos:
n(r ^r) = n(r) ^rn
r
^r
2
2!
n
rr
^r
3
8!
n
rrr
...
La forma operacional es
1n(r) =
_
1 ^r1
(^r1)
2
2
...
_
n(r) o
1n(r) = c
.r1
n(r) =c
.r1
=^r1 = ln1 (1.61)
La ltima forma es frecuentemente usada, por ejemplo: Diferencia hacia ade-
lante (forward)
^r1 = ln(1) = ln
_
1 c
_
[debido a c
= 1 1[
^r1 = c
c
2
2
c
3
8
c
d
4
...
donde cada trmino va dando el orden de truncamiento. Por ejemplo, si se desea
uno o bien dos trminos
^r(1n) (r
I
) - c
n(r
I
)
^r(1n) (r
I
) - c
n
I
1
2
c
2
n
I
= n
Il
n
I
1
2
(n
I2
n
Il
n
Il
n
I
)
As que
1n
I
= (n
r
)
I
=
8n
I
4n
Il
n
I2
2^r
^r
2
8
rrr
. .
lo que se encuentra entre las llaves sera el error de truncamiento.
138 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
DIFERENCIA HACIA ATRAS.
^r1 = ln1 = ln
_
1 c
l
_
=
c
c
2
2
c
3
8
c
d
4
..
DIFERENCIA CENTRAL
cn
I
= n
I
1
2
n
I
1
2
=
_
1
1
2
1
1
2
_
n
I
= c = c
.r
T
2
c
.r
T
2
= 2 sinh
^r1
2
^r1 = 2 sinh
l
(c,2) = c
c
3
24
8c
5
640
c
7
7168
..
Si slo se toma el primer trmino, nosotros derivamos una frmula de segundo orden
de aproximacin para la primera derivada
1n
I
=
1
2^r
_
n
Il/2
n
Il/2
_
^r
2
24
(n
rrr
)
I
Para involucrar valores de la funcin en los puntos enteros de la red se emplea el
operador central
c =
1
2
_
1 1
l
_
=
1
2
(c
.r1
c
.r1
) = sinh^r1
^r1 = sinh
l
(
c) =
c
c
3
6
8
c
5
2,4,
..
Si slo se toma el primer trmino, nosotros derivamos una frmula de segundo orden
de aproximacin para la primera derivada
1n
I
=
1
2^r
(n
Il
n
Il
)
^r
2
6
(n
rrr
)
I
DERIVADAS DE ORDEN SUPERIOR. Para computar las derivadas de or-
den superior se procede de la misma forma excepto que se necesita la expansin
binomial: hacia adelante
_
0
n
n
0r
n
_
I
= 1
n
n
I
=
1
(^r)
n
_
ln
_
1 c
_
n
n
I
=
1
^r
n
_
c
n
:
2
c
(nl)
:(8: )
24
c
(n2)
:(: 2) (: 8)
48
c
(n3)
...
_
n
I
Hacia atros
_
0
n
n
0r
n
_
I
=
1
^r
n
_
ln
_
1 c
_
n
n
I
=
1
^r
n
_
c
l
c
2
2
c
3
8
...
_n
n
I
=
1
^r
n
_
c
n
:
2
c
(nl)
:(8: 1)
24
c
(n2)
:(: 2) (: 8)
48
c
(n3)
...
_
n
I
1. INTRODUCCIN 139
Diferencia central
1
n
n
I
=
_
2
^r
sinh
l
c
2
_
n
n
I
=
1
^r
n
_
c
c
3
24
8c
5
640
...
_n
n
I
=
1
^r
n
c
n
_
1
:
24
c
2
:
64
_
22 :
00
_
c
d
:
4
_
7
: 1
(: 1) (: 2)
8
c
6
...
__
n
I
Observemos la forma de aproximacin para el caso de la segunda derivada
usando solamente dos trminos en la expansin
hacia adelante:
_
0
2
n
0r
2
_
I
= 1
2
n
I
=
=
1
^r
2
_
c
2
c
3
n
I
1
^r
2
_
0
d
n
0r
d
_
I
=
1
^r
2
(2n
I
n
Il
4n
I2
n
I3
)
1
^r
2
_
0
d
n
0r
d
_
I
Ejercicio 3. Para el siguiente problema de valor incial-frontera
0n
0t
=
0
2
n
0r
2
,
n(r, 0) =
_
r r
2
c
r
,
n(0, t) = 0, n(1, t) = 0
construya un esquema implicito de Crank Nicolson de segundo orden respecto a t
y /. Use el solver para hallar la solucin.
Coeciente variable. Una situacin frecuente en las aplicaciones es cuando
los parmetros en el modelo son funciones que dependen de las variables espaciales.
Veamos el caso cuando es ncesario aproximar la segunda derivada con coecientes
variables
0
0r
_
a(r)
0
0r
_
n
I
=
1
^r
2
c
(a
Il/2
c
)n
I
O(^r
2
) =
=
1
^r
2
c
(a
Il/2
c
)n
I
O(^r
2
)
Por consiguiente
0
0r
_
a(r)
0
0r
_
n
I
= a
Il/2
n
Il
n
I
^r
2
a
Il/2
n
I
n
Il
^r
2
O(^r
2
)
Ejercicio 4. Resolver
0n
0t
=
0
0r
((0,1 cos
2
r)
0n
0r
),
n(r, 0) = 1 r,
n(0, t) = cos t, n(1, t) = 0
construyendo un esquema de segundo orden respecto a t y /.
140 4. SOLUCIN DE PROBLEMAS POR DIFERENCIAS FINITAS
1.8. Mtodos de descomposicin de problemas estacionarios. De igual
forma como en el caso unidimensional las tcnicas implcitas ofrecen alternativas
que garantizan estabilidad. Sin embargo, la aplicacin directa de los mtodos im-
plcitos, como en el esquema de Crank-Nicolson, nos lleva a la solucin de : :
ecuaciones simultneas. Adems, cuando estn descritas para dos o tres dimen-
siones espaciales, estas ecuaciones pierden la valiosa propiedad de ser tridiagonales.
De esta manera, el almacenamiento de la matriz y el tiempo de computacin resul-
tan muy grandes. En muchas situaciones es posible llevar el problema a una serie
de problemas ms simple que se resuelven de forma ms efectiva en un ordenador.
Consideremos la ecuacin de evolucin
0n
0t
n = ), en 1 1
|
(1.62)
n = q en 1 para t = 0 (1.63)
donde el operador es denido positivo y es igual a la suma de dos operadores
denidos positivos
=
l
2
Por ejemplo, podemos considerar al operador =
0
2
n
0r
2
0
2
n
0j
2
, la regin 1 un
cuadrado de longitud 1. El operador puede depender del tiempo. Supongamos que
el operador ha sido aproximado mediante un operador en diferencias, denotemoslo
como (por comodidad lo seguiremos llamando ). Consideremos la aproximacin
de las matrices
I
(t) _ 0, i = 1, 2 en el intervalo t
_ t _ t
l
en la forma
A
o
=
o
(t
l/2
)
Construyamos el sistema de ecuaciones en diferencias que consisten en una sucesin
de esuqemas simples de Crank-Nicolson
n
l/2
n
t
A
l
n
l/2
n
2
= 0,
n
l
n
l/2
t
A
2
n
l
n
l/2
2
= 0 (1.64)
El sistema ( ) puede ser llevado a la forma despejando n
l/2
de la primera ecuacin
y luego reemplazando en la segunda ecuacin, tenemos
n
l
= T
donde
T
= (1
t
2
A
2
)
l
(1
t
2
A
2
)(1
t
2
A
l
)
l
(1
t
2
A
l
)
puede dmostrarse que el esquema ( ) es absolutamente estable y aproxima el
problema ( )-( ) con segundo orden respecto a t si los operadores A
l
y A
2
conmutan.
Ejercicio 5. Resolver por diferencias nitas usando un esquema de segundo
orden respecto a t y /.
0n
0t
=
0
0r
((2 sin
2
r)
0n
0r
)
0
0j
((0, cos
2
r)
0n
0j
),
n(r, j, 0) = 1 sinrsinj,
n(0, j, t) = n(2, j, t) = n(r, 0, t) = n(r, 2, t) = 1
2. 141
2.
CHAPTER 5
Transformada de Laplace
En el siglo pasado muchos matemticos trabajaron con el clculo operacional
(simblico), basado en la operacin formal sobre el smbolo j =
J
J|
. Por ejemplo el
grado positivo : del nmero j representa la n-sima derivada de la funcin.
j
n
.r =
d
n
r(t)
dt
n
,
y el negativo, la integral
(1)
(j)
.r =
_
|
0
r(:)d:
La aplicacin de este smbolo sobre la funcin r(t) = 1, nos lleva a la igualdad:
(1)
(j)
,1 =
_
|
0
d: = t;
1
(j
2
)
,1 =
_
|
0
:d: =
t
2
2
,
(1)
(j
n
)
,1 =
(t
n
)
(:!)
La popularidad del clculo operacional llev al ingeniero elctrico Heaviside a
emplearlo en la electrnica, la ecuacin r
t
r = 1, con la condicin r(0) = 0 la
cambi por jr r = 1, de aqu por el camino de operaciones formales sobre el
smbolo j obtuvo la solucin de la ecuacin original.
r =
1
j 1
=
1
j
.
1
1 1,j
=
1
j
(1
1
j
. . .
1
j
n
. . .) =
_
|
0
(1 t . . .
t
n
:!
. . .)dt = c
|
1
Solamente en los aos veinte este mtodo recibi fundamentacin en los trabajos
de Bronch y Carson y fue llamado mtodo operacional. La idea del mtodo consiste
143
144 5. TRANSFORMADA DE LAPLACE
en lo siguiente: Cambiar la derivacin y la integracin por operaciones algebricas,
encontrndose la solucin de stas y en consecuencia la solucin de las ecuaciones
diferenciales.
DEFINICION DEL OPERADOR DE LAPLACE
Cada funcin denida en + la hacemos corresponder a una funcin de variable
compleja j denida por:
(0.1) 1(j) =
_
o
0
c
|
)(t)dt
La funcin 1(j) se llama Transformada de Laplace de la funcin )(t). La fun-
cin 1(j) puede ser que no exista para cualquier funcin )(t), por esto la funcin
)(t) debe satisfacer las siguientes condiciones:
)(t) = 0 para t < 0;
para t _ 0, la funcin )(t) tiene en cada segmento nito no ms de un
nmero nito de discontinuidades de primer gnero.
cuando t la funcin )(t) tiene orden de crecimiento exponencial;
esto es existen las constantes a y ' tales que
(0.2) |)(t)| _ 'c
o|
, jara todo t 0
El inmo de los nmeros a para el cual tiene lugar (2), esto es la magnitud
inf a = a
o
se denomina exponente de crecimiento de la funcin )(t). Anotemos que
para a = a
o
la desigualdad (2) puede ser que no tenga lugar, como por ejemplo, en
el caso de que )(t) sea un polinomio (a
o
= 0).
Ejemplos. Las funciones )(t) = t,)(t) = ct,)(t) = 2t cos t son de orden
exponecial a = 1, para t 0. La funcin )(t) = c
|
2
no es de orden exponencial.
La integral (1) es una integral impropia, su regin de convergencia es el conjunto
de todos los complejos para los cuales la integral tenga sentido. En sntesis para
poder hablar de la tranformada de Laplace de una funcin )(t) se necesita que
_
o
0
c
t)(t)dt converja; para ello enunciamos el siguiente teorema.
TEOREMA 1.
Sea a
0
el orden exponencial de crecimiento de )(t). Entonces la transformada
de Laplace (1) converge para todos los valores j tales que +c(j) a
0
, y adems
para los j que satisfacen la condicin +c(j) _ r
0
a
0
la convergencia es uniforme.
Demostracin.
Sea j = rij , r a
0
. Elegimos c 0 de tal forma que r a
0
c. Entonces,
[ 1(j) [=[
_
o
0
c
|
)(t)dt [:_
_
o
0
c
r|
[ )(t) [ dt _
_
o
0
c
r|
'c
(o0t)|
dt =
'
(c
(ro0t)|)
r a
0
c
[
o
0
=
'
(r a
0
c)
(0.3)
de esta desigualdad concluimos que r a
0
la funcin 1(j) es mayorada por una
integral que converge absolutamente. Si adems r _ r
0
a
0
, entonces
5. TRANSFORMADA DE LAPLACE 145
[ 1(j) [_ '
_
o
0
c
(ro0t)|
=
'
(r
0
a
0
c)
<
'
l
(r
0
a
0
)
y esto signica que la transformada de Laplace converge uniformemente.
Comentario. De la relacin (3) se desprende que si +c(j) = r , entonces
[1(j)[ 0. Por lo tanto una funcin de j con la propiedad de que su lmite cuando
j o no existe o no es igual a cero no puede ser la transformada de laplace de
ninguna ). Por ejemplo; polinomios en j, sinj, c
, no son transformadas de Laplace.
Una funcin racional es transformada de Laplace si el grado del nmerador es menor
que el del denominador.
Asi que toda funcin continua a trozos de orden exponencial admite transfor-
mada de laplace.
La funcin 1(j) se llama la imagen de la funcin )(t), y la funcin )(t) se
denomina la original. Para representar esta correspondencia se utiliza la notacin
1(j) = 1[)(t)[
Demostremos que la transformada de Laplace es una funcin analtica.
TEOREMA 2.
La imagen de Laplace 1(j) para la funcin )(t) de orden exponencial a
0
, es
una funcin analtica de variable j en la regin +c(j) a
0
.
Demostracin. Por el teorema (1) la integral
_
o
0
c
|
)(t)dt converge uniforme-
mente para +c(j) _ r
0
a
0
, por lo tanto particionando el segmento [0, ) en
segmentos [t
u
, t
u
1[, = 0, 1 . . . ; t
0
= 0, en los cuales la funcin )(t) es continua
obtenemos la serie:
_
o
0
c
|
)(t)dt =
o
u=0
_
|rl
|r
c
|
)(t)dt =
o
u=0
n
u
(j)
La ltima serie converge uniformemente junto con la integral. Pero, cada fun-
cin n
u
(j) es analtica en la regin +c(j) a
0
. Esto es as, observemos que la
derivada :
n
t
u
(j) = lim
.0
n
u
(j ^j) n
u
(j)
^j
=
= lim
.o
_
|rl
|r
)(t)c
|
c
.|
1
^jt
(t)dt =
_
|rl
|r
t)(t)c
|
dt
es una fucin continua respecto a j. En consecuencia la funcin n(j) es una funcin
analtica y la suma de la serie, o sea, 1(j) es una funcin analtica en la regin
+c(j) a
0
.
0.1. Transformada de Laplace de ciertas funciones. 1. Evaluar 1[t[.
De acuerdo con la denicin, 1[t[ =
_
o
0
c
|
tdt. Al integrar por partes tenemos
1(j) =
l
2
.
2.Evaluar 1[c
3|
[. De acuerdo con la denicin, 1[c
3|
[ =
_
o
0
c
|
c
3|
dt. Al
integrar tenemos 1(j) =
l
3
, j 8.
3. Evaluar 1[H(t)[, donde H(t) es la funcin de Heaviside. Facilmente se com-
prueba que 1(j) =
l
.
146 5. TRANSFORMADA DE LAPLACE
4. Evaluar 1[)(t)[, donde )(t) = [t[ es la funcin parte entera de t.
5.Evaluar 1[)(t)[, donde )(t) = t [t[.
6. Sea c un nmero positivo y consideremos la funcin )
t
(t) denida por
)
t
(t) =
_
l
t
, si 0 _ t _ c
0 si r 0
anotemos que
_
o
0
)
t
(t)dt =
_
t
0
l
t
dt = 1. La transformada de Lapace de )
t
(t) es
1(j) =
lt
c
t
. Adems lim
t0
1[)
t
(t)[ = 1. Estrictamente hablando,
lim
t0
)
t
(t)
no existe como funcin, de modo que 1[lim
t0
)
t
(t)[ no esta denido, pero si olvi-
damos la rigurosidad podemos decir que
c(t) = lim
t0
)
t
(t)
es una especie de "funcin generalizada"que es innita en t = 0 y nula en t 0 y
tiene las propiedades
_
o
0
c(t)dt = 1 1[c(t)[ = 1
llamada funcin delta de Dirac o funcin impulso.
Propiedades de la Imagen.
1. Linealidad. Supngase 1[)
|
(t)[ = 1
|
(j), +c j a
|
,/ = 1, 2, ... Entonces
la imagen de la combinacin lineal
|=l
c
|
)
|
(t), a
|
constanes,
es una combinacin lineal de las imagenes, esto es
1[
|=l
c
|
)
|
(t)[ =
|=l
c
|
1
|
(j), +c(j) max
lrn
2. Teorema de escalamiento. Supnagse que 1[)(t)[ = 1(j) para +c(j) a
o
.
Entonces para cualquier constante c 0 es valda la relacin
1[)(ct)[ =
1
c
1(
j
c
) para +c(j) c.a
o
3. Teorema del retardo. Supngase que 1[)(t)[ = 1(j) para +c(j) a
o
y
)
r
(t) =
_
)(t t), si t _ t
0 si t < t
Entonces 1[)
r
(t)[ = c
r
1(j). Veamos 1[)
r
(t)[ =
_
o
0
c
|
)
r
(t)dt =
_
o
r
c
|
)(t
t)dt =
_
o
0
c
r
c
u
)(n)dn.
4. Teorema. Supngase que la funcin )(t) y sus derivadas )
(|)
(t), / = 1, 2, . . . , :,
son las originales, adems 1[)(t)[ = 1(j) para +c(j) a
0
. Entonces es vlida la
frmula 1[)
t
(t)[ = j1(j) )(0) y en general
1[)
(|)
(t)[ = j
|
[1(j)
)(0)
j
)
t
(0)
j
2
. . .
)
(|l)
(0)
j
|
[
5. TRANSFORMADA DE LAPLACE 147
Demostracin: Verdaderamente despues de derivar por partes llegamos a la igualdad
1[)
t
(t)[ =
_
o
0
c
|
)
t
(t)dt
= c
|
)(t)[
o
0
j
_
o
0
c
|
)(t)dt = j1(j) )(0)
Ahora para / = 2:
1[)"(t)[ = 1[(()
t
(t))
t
[ = j[j1(j) )(0)[ )
t
(0)
Y as sucesivamente para / = 8, 4, . . . , :.
DERIVADA DE LA IMAGEN (de la Transformada)
Si 1(j) = 1[)(t)[ para +c(j) a
0
, entonces 1
t
(j) = 1[t)(t)[ y
(0.4) 1
n
(j) = 1[(t)
n
)(t)[, : = 2, 8, . . .
Demostracin: Derivando 1(j) con respecto a j y observando que la multipli-
cacin de )(t) por t
|
para cualquier / = 1, 2, .. no eleva el orden de crecimiento de
la funcin )(t) obtenemos la siguiente igualdad,
1
t
(j) =
_
o
0
c
|
(t))(t)dt
Empleando esta relacin y por induccin podemos obtener la frmula para 1
(
:)(j).
0.2. TRANSFORMADA INVERSA DE LAPLACE. En los parrafos
anteriores nosotros nos dedicamos a la busqueda de la imagen a travs de del oigi-
nal bien por la denicin o bien aplicando las propiedades de la transformada de
Laplace. Sin embargo en la solucin de muchos problemas practicos se llega a un
problema de determinar el original a travs de la imagen. La solucin parcial de
este problema se da por el teorema siguiente.
Teorema de Mellin. Sea 1(j) una funcin analtica en +c(j) a
0
, 1(j) es
la imagen de una funcin sueve a trozos en el segmento [0, ), )(t) con orden de
crecimiento exponecial a
o
. Entonces es vlida la frmula
)(t) =
1
2i
_
rIo
rIo
c
|
1(j)dj, r a
0
Demostracin:
Sea r a
0
. Consideremos la funcin auxiliar ,(t) = c
r|
)(t). Como )(t) es
suave a trozos, entonces ,(t) tambin ser suave a trozos en cada sgmento [0, ).
Adems ,(t) es absolutamente integrable ya que,
_
o
0
[ ,(t) [ dt =
_
o
0
c
r|
[ )(t) [ dt _ '
_
o
0
c
r|
c
(o0t)|)
dt =
= '
_
o
0
c
(ro0t)|
dt
148 5. TRANSFORMADA DE LAPLACE
Tomemos c tan pequeo como sea necesario para que se cumpla r a
0
c
0.Entonces la integral de la derecha converge en [0, ).
Representemos funcin ,(t) con la ayuda de la integral de Fourier, observando que
)(t) =
1
2
[)(t 0) )(t 0)[ ,
,(t) =
_
o
o
_
o
o
,(n)c
I2u(|u)
dnd
=
1
2
_
o
o
_
o
0
,(n)c
Iu(|u)
dndn
Colocando en esta expresin en lugar de ,(t), la expresin c
r|
)(t), obtenemos
c
r|
)(t) =
1
2
_
o
o
c
Iu|
dn
_
o
0
)(n)c
ru
c
Iuu
dn
que puede ser escrita de la forma
)(t) =
1
2
_
o
o
c
|(ruI)
dn
_
o
0
)(n)c
u(rIu)
dn
Haciendo j = r in, dj = idn, se tiene:
)(t) =
1
2i
_
rIo
rIo
c
|
dj
_
o
0
)(n)c
u
dn
esto es
)(t) =
1
2i
_
rIo
rIo
c
|
1(j)dj
0.3. SOLUCION DE ALGUNOS PROBLEMAS DE LA FISICA
MATEMATICA POR MEDIO DE LA TRANSFORMADA DE LAPLACE.
Empleando el mtodo operacional encontremos la solucin del problema siguiente.
Encontrar la distribucin de temperatura n(r, t) en un alambre semiinnito (0 _
r _ ) si en su extremo izquierdo la temperatura es igual a (t) y la temperatura
inicial es igual a cero, en otras palabras encontrar la solucin de la ecuacin
0n
0t
= a
2
0
2
n
0r
2
, r _ 0, t _ 0 (0.5)
n(r, 0) = 0 y n(0, t) = (t) (0.6)
Supongamos que la funcin desconocida n(r, t) y sus derivads son las originales
(respecto a la variable t y denotemos como n(r, j) = 1[n(r, t)[ =
_
o
0
n(r, t)c
|
dt.
Entonces son vlidas las relaciones:
1[
0n(r, t)
0t
[ = jn(r, j), 1[
0
2
n(r, t)
0r
2
[ =
0
2
n(r, j)
0r
2
y la ecuacin (1) con las condiciones (2) le corresponden la ecuacin operacional
jn(r, j) = a
2
d
2
n(r, j)
dr
2
(0.7)
n(0, j) = Q(j) = 1[(t)[ (0.8)
5. TRANSFORMADA DE LAPLACE 149
Considerando en la ecuacin (3) a j como parmetro, encontramos la solucin de
la ecuacin respecto a la variable r. Ya que la ecuacin auxiliar a
2
/
2
j = 0 tiene
races /
l,2
=
_
j,a, entonces
(0.9) n(r, j) = C
l
c
p
o
r
C
2
c
o
r
es la solucin general de la ecuacin (3). La funcin n(r, j) debe ser acotada cuando
r , por lo tanto C
l
= 0. De la condicin (4) encontramos la constante C
2
:
n(0, j) = Q(j) = C
2
As que la solucin de (3) que satisface a (4) es la funcin
n(r, j) = Q(j)c
o
r
Se puede demostrar que
n(r, t) =
1
2
a
_
_
|
0
(t t)
t
3/2
c
o
2
4o
2
:
dt
EJERCICIOS
Encontrar la solucin de:
0
2
n
0r
2
=
1
a
2
0
2
n
0t
2
n(r, 0) = cos
:r
1
0n(r, 0)
0t
= 0
0n(0, t)
0r
=
0n(1, t)
0r
= 0
2. Resolver
0
2
n
0r
2
=
1
a
2
0
2
n
0t
2
junto con las condiciones
n(r, 0) = 0 , n(0, t) = n(1, t) = 0,
0n(r, 0)
0t
= 1sin
:r
1
.
CHAPTER 6
151
1. MTODOS VARIACIONALES 153
(n, ) =
_
:
n(r)(r)d\
Se le llama producto escalar de las funciones n y .
DEFINICION: Sea A = C(\) conjunto de funciones continuas y reales en el
dominio \. Sea un operador (transformacin) lineal denido en C(\) y cuyos
valores son igualmente funciones continuas denidas en el dominio \. Una trans-
formacin lineal cualquiera se llama simtrica si para dos funciones admisibles cua-
lesquiera n y se cumple la expresin
_
:
n(r)(r)d\ =
_
:
n(r)(r)d\
Si adems para cada funcin admisible n se cumple la desigualdad (n, n) _ 0
y (n, n) = 0 implica n = 0, el operador se denomina positivo.
Un ejemplo sencillo se describe a continuacin. Sea \ _ +
3
una regin acotada
con frontera suave. Veamos el siguiente operador lineal por
n = di(j(r)n) n. En el conjunto de todas las funciones n C
2
(\), la
funcion n satisface la condicion ,n j
Ju
Jn
= 0, en la region \
Donde j(r) C
l
(\), j(r) 0 ; C
l
(\), (r) _ 0 ; son funciones dadas;
: es la normal exterior a la frontera de la regin.
PROBLEMA VARIACIONAL.
Sea dado el funcional 1 = 1(1 (r)) del cual se supone que est denido en un
conjunto A = 1 (r) de funciones admisibles. Al problema en que se exige investi-
gar el mximo o el mnimo de un funcional, se denomina problema variacional. Es
decir, se busca una funcin 1 (r) de forma que para todas las funciones admisibles
n(r) se cumpla la desigualdad
1(1 ) _ 1(n). En el caso de un mnimo .
1(1 ) _ 1(n). En el caso de un mximo.
Sea dado el dominio \ con la frontera 0\ una ecuacin diferencial lineal (ordi-
naria, o en derivadas parciales), siendo los coecientes funciones continuas n = )
donde ) es una funcin continua conocida. La funcin n pertenece a la clase A y
satisface en la frontera 0\ las condiciones de contorno 1(n) = 0 donde 1 es un
operador diferencial lineal de orden inferior al de .
n = ) (1.1)
1(n) = 0 (1.2)
La idea fundamental del mtodo variacional empleado en nuestro caso, consiste en
que el problema (1)-(2) se sustituye por un problema equivalente al de la determi-
nacin de un extremo (normalmente un mnimo) para una funcional determinada.
Teorema 2. Sea un operador lineal, denido positivo y autoconjugado con
regin de denicin 1(), que es un conjunto totalmente denso en cierto espacio
de HILBERT H con producto interno <. , . y con regin de valores 1() que
pertenece H; el elemento n 1() y ) cierto elemento de H. Entonces tiene
1. MTODOS VARIACIONALES 155
Luego reemplazando la ecuacin de Euler,
0
2
u
0x
2
0
2
u
0y
2
= 0
De ac podemos observar que un problema de la fsica matemtica lo podemos
tratar ya sea como un problema diferencial (ecuacin de Euler), o como un prob-
lema de clculo variacional. En otras palabras, si se tiene una ecuacin diferencial
1n = ), donde 1 es un operador lineal, simtrico y denido positivo, entonces, su
correspondiente problema variacional ser
Jn = min
u
J(n)
donde
J(n) = (1n, n) 2(), n)
y
(1n, n) =
_
1
_
1n.ndrdj;
Y la ecuacin de Euler:
0
2
u
0x
2
0
2
u
0y
2
= )(r, j)
1.1. METODO DE RIETZ. Uno de los mtodos de solucin ms cono-
cidos para las ecuaciones en derivadas parciales es el mtodo de Rietz. Sea \ el
espacio en que se busca el mnimo de la funcin J(n). Construyamos una sucesin
de subespacios de dimensin nita \
n
\, y en vez de buscar el mnimo en \ lo
buscamos en \
n
. Sea n la dimensin de \
n
y ,
(n)
I
(r),i = 0, 1, 2, ..., : 1 una base
de este subespacio, es decir si n
n
\
n
,
(1.6) n
n
=
nl
I=0
a
I
,
(n)
I
(r)
Si n
n
reemplaza a n en J(n), tenemos una funcin de : variables a
0
, a
l
, ..., a
nl
;
y dado que deseamos obtener el mnimo de esta funcin, los nmeros a
I
deben
satisfacer el sistema de ecuaciones
0J
0a
I
= 0 i = 0, 1, 2, ..., : 1
Al resolver el sistema, obtenemos unos valores a
0
0
, a
0
l
, .., a
0
nl
que aportan el mni-
mo absoluto para la funcin J(n
n
). Sustituyendo estos valores en (2) obtenemos la
solucin aproximada pedida,
n
n
=
nl
I=0
a
0
I
,
(n)
I
(r)
1. MTODOS VARIACIONALES 157
en los puntos 1
l2
, 1
23
, 1
3l
puntos medios de los segmentos 1
l
1
2
, 1
2
1
3
, 1
l
1
3
.
Si enumeramos todos los vrtices de los tringulos como 1
|
!
|=l
y por 1
|,|
la unin
de todos los tringulos con vrtice comn 1
|
, entonces el espacio base ser el sistema
de funciones\
|
(r)
!
|=l
que se denen por la condicin \
|
(1
) = c
|
,donde c
|
es el smbolo de Kronecker; las funciones \
|
(r) en cada uno de los triangulos es
una funcin lineal.
Veamos un ejemplo, cuando1 es un cuadrado de longitud 1
Sea / =
l
l
. El sistema de funciones bases \
|
(r)
2
|=l
;
2
=
|
represen-
tando para este caso por \
|,l
(r)
|,l=l
, y n
|
(r) = n
n
=
|,l=l
c
|,l
\
|,l
(r), ahora
reemplazando en la funcional (3) y haciendo c
|,l
= c
(|l)l
, /, | = 1, ..., ,
obtenemos:
J(n
n
) =
_
1
[
2
I,=l
I
(
|,l
c
|l
0W
l,I
0X
I
)
2
2
|,l
c
|l
\
|l
(r))[d1
Derivando la expresin anterior respecto a c
|l
e igualando a cero tenemos ,
0J(u
n
)
0c
lI
= 0
obtenemos el sistema c = q, donde q
(|l)l
= q
|,l
=
_
1
!
)\
|,l
(r)d1, /, | =
1, ..., . y los elementos de la matriz A se calculan por las frmulas
a
(|l)l,(Il)
=
_
1
2
s,|=l
s|
(r)
0
0X
s
\
|,l
0
0X
i
\
I
d1
/, |, i, , = 1, ..., .
Introduzcamos la siguiente representacin a
I,
|,l
= a
(|l)l,(Il)
. Teniendo en
cuenta la forma de las funciones \
|,l
(r
l
, r
2
)
|,l=l
vemos que si se cumple aunque
sea solo una de las dos desigualdades [i /[ 1 ; [, |[ 1, /, |, i, , = 1, ..., ,
entonces a
I,
|,l
= 0
De aqu podemos entonces escribir como una matriz de bloques de tres ban-
das.
_
ll
l2
0 .. 0 .. 0
2l
22
23
0 .. .. 0
... .. .. .. .. .. ..
0 0 0 .. ..
,l
_
Donde
||
=
+
||
;
|,|l
=
+
|l,|
,/ = 1, 2, ..., , y cada una de estas matrices
es a su vez una matriz de tres bandas de orden
1. MTODOS VARIACIONALES 159
\
2
= \(r
2
, j
2
) = c
l
c
2
r
2
c
3
j
2
\
3
= \(r
3
, j
3
) = c
l
c
2
r
3
c
3
j
3
En cada uno de los puntos hacemos \
I
= 1, i = 1, 2, 8, y el resto cero; por ejemplo
\
l
= 1, \
2
= \
3
= 0.
Si = 1,2(r
2
j
3
r
3
j
2
r
3
j
l
r
l
j
3
r
l
j
2
r
2
j
l
), la solucin ser:
c
l
= (a
l
\
l
a
2
\
2
a
3
\
3
),2
c
2
= (/
l
\
l
/
2
\
2
/
3
\
3
),2
c
3
= (c
l
\
l
c
2
\
2
c
3
\
3
),2
Con
a
l
= r
2
j
3
r
3
j
2
, /
l
= j
2
j
3
, c
l
= r
3
r
2
a
2
= r
3
j
l
r
l
j
3
, /
2
= j
3
j
l
, c
2
= r
l
r
3
a
3
= r
l
j
2
r
2
j
l
, /
3
= j
2
j
l
, c
3
= r
2
r
l
Si )
I
(r, j) = (a
I
/
I
r c
I
j),2 , i = 1, 2, 8. Es una funcin de interpolacin, y
es igual a 1 en el i-simo nodo y cero en el resto de los nodos, , = a
t
l
)
l
(r, j)
a
t
2
)
2
(r, j) a
t
3
)
3
(r, j).
Sea
=
n=l
n
, = nmero de tringulos, y
n
= 1,2
_
.r
(n)
2
d
_
.r
)(r, j)nd
_
(J.r)r
(
0u
0n
)nd:
donde
n
es el n-simo tringulo;
n
es evaluado utilizando ,;
Jtn
Ja
0
i
= 0
Entonces:
0,
0x
=
3
I=l
a
t
I
0f
I
0x
= (a
t
l
/
l
a
t
2
/
2
a
t
3
/
3
),2
1. MTODOS VARIACIONALES 161
C
00
C
l0
(0) C
0l
(0) = 0
C
00
C
l0
(1) C
0l
(2) = 0
de donde C
00
= 0, C
l0
=
2
3
, C
0l
=
l
3
y \
l
l
(r, j) =
2
3
r
l
l
3
r
2
.
De manera similar construimos \
l
2
que asume el valor 1 en el punto (1, 1) ,
cero en (0, 0) y (1, 0), para obtener \
l
2
(r, j) = j.
Luego lo se realiza de forma similar para los dems puntos.
EJERCICIOS
1. Llevando el problema de Dirichlet
J
2
u
Jx
2
J
2
u
Jy
2
= 1 ,
(r, j) 1, n(r, j) = 0 en la frontera 1, al problema de minimizar la funcional
J(n) =
_
1
(n
2
r
n
2
2n)drdj,
Donde 1: 1 < r < 1 , 1 < j < 1; encontrar la solucin aproximada
si tomamos como funciones de base n
l
(r, j) = (r
2
1)(j
2
1), n
2
(r, j) =
(r
2
1)(j
2
1)(r
2
j
2
).
2. Resolver
J
2
u
Jx
2
J
2
u
Jy
2
= 0 en 1, n(r, j) = 4 para (r, j) 1
6
y
(r, j) 1
7
;
1. MTODOS VARIACIONALES 163
CHAPTER 7
Teora de los Problemas Inversos y Mal Puestos
El objetivo de muchos experimentos, que se realizan en diferentes ramas de las
ciencias y de la tcnica, consisten en el estudio de las propiedades de los objetos
o procesos, que son de interes del investigador. Por lo general es frecuente que en
muchas situaciones no se pueda alcanzar las caractersticas del objeto a travs de la
observacin directa, o bien en el caso donde se pueda se necesita una gran cantidad
de recursos para encontrarlas. De esta manera, nos enfrentamos a problemas, en los
cuales se debe denir las causas, si se conocen los efectos; esto es, las observaciones;
esto es frecuente en la obtencin de resultados en experimentos. Estos problemas
es natural llamarlos Inversos.
La solucin de los problemas Inversos se llevan a cabo a travs de cierto Modelo
Matemtico del objeto observado o proceso y consiste en la denicin de parmetros
del modelo matemtico a partir de la informacin experimental.
Tipos de problemas inversos:
> Problemas inversos que consisten en determinar la parte derecha de la ecuacin,
> Identicacin de coecientes de la ecuacin diferencial,
> o ambos
Daremos a continuacin ciertos ejemplos de problemas Inversos.
165
166 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
1. EJEMPLO. La rapidez con que una comunidad de ' personas adotan
una una innovacin tcnologica en el momento t est dada por
dr
dt
= c(2r(t) ') (0.12)
:(t
o
) = ' (0.13)
Si las constantes c y ' son conocidas, entonces, al resolver el problema de
Cauchy sabemos como va cambiando la cantidad de individuos que al tiempo t han
adaptado la innovavcin tcnologica. El problema Inverso consiste en determinar
el coeciente c y el nmero de individuos de la poblacin si se conocemos que a
travs del tiempo puede denir la magnitud r(t) para t [t
l
, t
2
[. De esta manera
se debe determinar el coeciente c y ' si se conoce la funcin r(t) para t [t
l
, t
2
[.
2. EJEMPLO. Claramente los precios cambian con el precio como un resul-
tado de la inacin. Asumiremos que el factor inacionario esta dado como una
funcin del tiempo por 1(t). Tambin asumiremos que aparte de la inacin la tasa
de cambio en el precio es uan funcin de la oferta /(o); nuestro MM
dj
dt
= 1(t) /(o)
do
dt
= q(j) (0.14)
donde
d:
dt
es la tasa de cambio de la oferta en funcin del precio.
Si tomamos las funciones /(o) = /
l
(o o
o
), q(j) = /
2
(j j
o
), donde (o
o
, j
o
)
puntos de equlibrio, podemos escribir ( ) asi:
d
2
j
dt
2
aj = G(t),
j(0) = j
l
, j
t
(0) = j
2
PROBLEMA INVERSO. Supngase ahora que la funcin G(t) es desconocidad,
pero la funcin j(t) se conoce en un determinado intervalo de tiempo [t
l
, t
2
[.
2. La accin (operacin) de muchos instrumentos, que registran un campo sco,
se pueden describir de la siguiente manera. En la entrada del instrumento se recibe
una seal .(t) , en la salida se registra una funcin n(t). Un modelo simple lineal
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 167
para esta accin del instrumento se dene por la formula:
_
|
0
1(r, t).(t)dt = n(t)
donde 1(r, t) es una funcin conocida. De esta manera, el problema Inverso, con-
siste en la denicin de la seal de entrada .(t) cuando se ha registrado la funcin
de salida n(t), este problema representa el problema de la solucin de la ecuacin
integral.
3. El problema de contorno para la ecuacin de difusin en un tubo vaco, o
en un tubo lleno de un medio , suponiendo que en todo momento de tiempo la
concentracin del gas (d ela solucin) es igual en cada seccin. Entonces, el proceso
de difusin puede ser descrito mediante la EDP
cn
|
= (/(r)n
r
)
r
n ) (0.15)
n(0, t) `
l
n
r
(0, t) = j
l
(t) (0.16)
n(|, t) `
2
n
r
(|, t) = j
2
(t) (0.17)
n(r, 0) = ,(r) (0.18)
es uno de los modelos matemticos que describe una gran cantidad de fenomenos
scos. Los coecientes que aparecen en la ecuacin son conocidos y como es sabido
son las caracterticas del proceso. Cuando estos coecientes son dados, al resolver
el problema directo se encuentra la funcin n(r, t). Sin embargo en muchos prob-
lemas reales algunas de estas caractersticas del medio no son conocidas, pero de
la experimentacin se puede encontrar informacin acerca de la concentracin bi-
en sea en un intervalo de tiempo medido en un punto r
+
. Por ejemplo, todos los
coecientes y las funciones , que denen la solucin se conocen salvo el coeciente
de difusin / = /(r). Experimentalmente se dene la funcin q(t) = n(r
o
, t), que
es la concentracin en cierto punto interior del medio. De esta manera aparece el
siguiente problema Inverso: determinar el coeciente de difusin /(r), si se da la
funcin suplementaria q(t). Es claro que se pueden denir otros problemas Inversos.
Todos los tres problemas que se discutieron anteriormente pueden ser formu-
lados de manera abstrata. Representemos como .(t) la caracterstica desconocida
del modelo matemtico, y a travs de el operador que hace corresponder a . con
la magnitud n, que se observa como resultado del experimento. De esta manera el
problema inverso consiste en la solucin de la ecuacin . = n, donde se conoce
168 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
tanto el operador como n y se debe encontrar a .. Para nuestro primer ejemplo,
. representa la pareja de valores c y ', el operador se dene por el problema de
Cauchy y n = :(t); lo mismo se puede hacer con los otros problemas descritos
arriba.
Una particularidad importante de los problema inversos consiste que la infor-
macin obtenida a partir de los experimentos es conocida de manera aproximada.
De esta manera los mtodos de solucin de los problemas Inversos deben tener la
condicin de ser Estables con respecto a los pequeos cambios que se puedan dar
en los datos de entrada.
Conceptos sobre el Planteamiento Correcto y No-Correcto de los
Problemas.
El concepto de Planteamiento Correcto de problemas matemticos fue formu-
lado por Hadamar para el analsis de diferentes problemas de la sca matemtica.
La solucin de cualquier problema consiste en la denicin del elemento . (solu-
cin del problema) dado ciertos datos de entrada, y se puede describir asi:
(0.19) . = 1(n)
Siempre se supone que los datos de entrada son elementos de cierto espacio
metrico l, y la solucin . se busca en el espacio metrico 7, esto es . 7. El
problema ( ) se dice que esta Planteado Correctamente (propuesto, bien colocado,
bien puesto) en la pareja de espacios 7 y l si se cumplen las siguientes condiciones:
1. Para cada n l la solucin del problema existe.
2. Para cada n l la solucin del problema es nica.
3. La solucin del problema continuamente depende de los datos de entrada
(condicin de estabilidad).
Los problemas que no satisfacen estas condiciones se denominan Problemas
Colocados No-Correctamente (Problemas Mal Puestos) (Problemas Mal Plantead-
os).
Veamos algunos ejemplos:
EJEMPLO. Consideremos el siguiente modelo
_
a(r)n
0
(r)
_0
= )(r), 0 < r < 1 (0.20)
a(0)n
0
(0) = /
o
, a(1)n
0
(1) = /
l
(0.21)
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 169
El problema inverso consiste en la identicacin del coeciente a(r) a travs de la
informacin suplementaria sobre n(r).
Veamos algunas cosas de inters con respecto a este planteamiento. Tomemos
como datos de infromacin
)(r) =
_
4r 1, r [0, 1,2[
0, r [1,2, 1[
n(r) =
_
r
2
r ,4, r [0, 1,2[
1, r [1,2, 1[
(0.22)
Elijamos el coeciente a(r) de la siguiente forma
a(r) =
_
r, r [0, 1,2[
r
2
1, r [1,2, 1[
al resolver el problema ( )-() con este coeciente y parte derecha ( ) vemos que la
solucin esta dada por la funcin escrita en ( ).
Puede verse facilemente que para cualquier funcin diferenciable q(r) denida
en [1,2, 1[ tal que q(1) = 0, y q
0
(1,2) = 1, el coeciente
a(r) =
_
r, r [0, 1,2[
q(r), r [1,2, 1[
satisface a ( ).
Lo visto anteriormente nos indica que el problema inverso es un problema mal
puesto ya que para la informacin dada existe varais soluciones, osea la condicin
de unicidad se vioala.
Adems, la dependencia continua de los datos de entrada no s ecumple; veamos
que esto es as. Tomemos como datos de entrada a
)(r) = r, r [0, 1[,
/
o
= 0, /
l
= 1,
a(r) = r, la solucin sera n(r) = r
ahora perturbemos la solucin, n
(r) = r+ sin(r,
2
). Facilmente vemos que la
solucin asociada a n
manteniendo los dems parmetros iguales sera a
(r) =
r,
_
cos(r,
2
_
. Observemos que cuando 0 la funcin n
n uniforme-
mente, pero ojo, las correspondientes soluciones (coecientes a) no cumplen la
condicn que a
a, osea, a
9a
EJEMPLO. Consideremos la E.I de Volterra
(0.23)
_
r
o
1(r, :).(:)d: = n(r), 0 _ r _ 1
170 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
Se debe detrminar la funcin .(r). Supngase que la funcin /(r, :) es continua
junto con sus derivadas parciales para 0 _ : _ r _ 1 y /(r, r) = 1 para r [0, 1[.
Supongase que la funcin n(r) pertenece al espacio C
l
o
[0, 1[; osea el conjunto
de funciones continuas en el segmento [a, /[ y adems n(0) = 0. En este espacio
introduzacamos la norma:
[[n[[ = max
0rl
[n(r)[ max
0rl
[n
t
(r)[
Supongamos que la solucin .(r) la buscamoe en el espacio C[0, 1[. Derivemos la
ecuacin ( ) y obtenemos:
(0.24) .(r)
_
r
o
1
r
(r, :).(:)d: = n
t
(r)
que es una E.I de Volterra de segunda clase. La solucin de esta ecuacin es equiv-
alente a encontrar la solucin de la E.I ( ). Para cualquier funcin continua de la
parte derecha n
t
(r) la ecuacin ( ) tiene solucin nica y continua:
(0.25) .(r) = n
t
(r)
_
r
o
I(r, :)n
t
(:)d:
donde I(r, :) es la resolventa de la ecuaci ( ). La funcin I(r, :) es continua para
0 _ : _ r _ 1. Por lo tanto de ( ) tenemos:
[[.[[
c|0,l|
_ '[[n[[
c
1
c
|0,l|
por lo tanto en este caso el problema inverso es bien puesto.
EJEMPLO. El problema directo es encontrar la antiderivada j con j (0) = 0
de una funcin continua r sobre [0, 1[, es decir, encontrar
j(t) =
_
|
0
r(:) d:, t [0, 1[ .
En el problema inverso, tenemos una funcin continuamente diferenciable j en [0, 1[
con j (0) = 0 y queremos determinar r = j
t
. Esto signica que tenemos que resolver
la ecuacin integral 1r = j, donde 1 : C [0, 1[ C [0, 1[ y se dene por:
(1r) (t) =:
_
|
0
r(:) d:, t [0, 1[ , para r C [0, 1[ .
Aqu se considera C [0, 1[ con la norma del mximo |r|
o
=: max
0 | l
[r(t)[. La
solucin de 1r = j es precisamente la derivada r = j
t
, con j (0) = 0 y j es
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 171
continuamente diferenciable. Si r es la solucin exacta de 1r = j y se perturba
j en la norma ||
o
, entonces el lado derecho perturbado de j no tiene que ser
diferenciable, an cuando la solucin perturbada del problema est cerca de la
solucin exacta. (ver gura 8)
Figura 3. Representacin de perturbado y no perturbado.
El problema (1, C [0, 1[ , C [0, 1[) es por consiguiente mal - puesto. Ahora si esco-
gemos un espacio diferente, 1 =:
_
j C
l
[0, 1[ : j (0) = 0
_
para el lado derecho y
dotamos a 1 con la norma ms fuerte |r|
c
1 =: max
0 | l
[r
t
(t)[. Si el lado derecho es
perturbado con respecto a sta norma ||
c
1, entonces el problema (1, C [0, 1[ , 1 )
es bienpuesto por que 1 : C [0, 1[ 1 es invertible. Este ejemplo ilustra de
nuevo que los datos de un problema bienpuesto depende de la clase de mtrica
que elijamos.
EJEMPLO. En el tratamiento numrico de las ecuaciones integrales, un error
de discretizacin no puede evitarse. Para ecuaciones integrales de primer orden, una
sencilla discretizacin normalmente lleva a resultados errneos como los muestra
el siguiente ejemplo.
Sea la ecuacin integral
_
l
0
oxp(t:) r(:) d: = j (t) , 0 _ t _ 1,
con
j (t) =
(oxp(t 1) 1)
t 1
,
con solucin nica r(t) = oxp(t). Aproximando la integral por la regla del trapecio
se tiene
_
l
0
oxp(t:) r(:) d: - /
_
_
1
2
r(0)
1
2
oxp(t) r(1)
nl
=l
oxp(,/t) r(,/)
_
_
172 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
donde / =
l
n
. Para t
I
= i/, se obtiene el sistema lineal
/
_
_
1
2
r
0
1
2
oxp(i/) r
n
nl
=l
oxp
_
,i/
2
_
r
_
_
= j (i/) , i = 0, 1, 2, . . . , :.
Entonces r
I
debe ser una aproximacin a r(i/). El siguiente cuadro lista el error
entre la solucin exacta r(t) y la solucin aproximada r
I
para t = 0, 0,2, 0,, 0,7
y 1. Aqu i es escogido tal que i/ = t
t : = 4 : = 8 : = 16 : = 82
0 0,44 0,47 1,00 48,21
0,2 0,67 2,02 18,86 1,68
0, 0,0 4,77 0,6 14,10
0,7 1,02 8,07 26,28 8,02
1 1,00 1,28 1,00 20,18
Cuadro l. Discrepancias entre la solucin aproximada y la verdadera.
Vemos que las aproximaciones no tienen nada que ver con la solucin verdadera y
se vuelve an peor para los esquemas de discretizacin ms nos.
TIP. Veamos la pregunta sobre el planteamiento correcto del problema de la
solucin de la ecuacin operacional
(0.26) . = n
donde es un operador que actua de los espacios 7 y l ( espacios lineales nor-
mados). En correspondencia con las deniciones dadas para la colocacin correcta
de un Problema dado, para ( ) sera que para cualquier n l la solucin de la
ecuacin exista y sea nica, adems que . dependa continuamente de n. De estas
condiciones se desprende , que el problema de la solucin de la ecuacin ( ) sera
Correcta si en l esta denido el operador
l
, el inverso de , y sea continuo en
l. Demos el teorema de Banach sobre el operador inverso.
Teorema 1. Si el operador lineal acotado actua del espacio 7 en todo el espacio
l de manera biyectiva, entonces, existe un operador lineal acotado
l
, el inverso
de , que actua de l a 7.
De este teorema se desprende, que si el operador es lineal, continuo y aplica
de manera biunivoca el espacio 7 sobre el espacio l, donde 7 y l son espacios de
Banach, entonces, el problema de la solucin de la ecuacin (13) es correcto.
Veamos la pregunta sobre la correctitud de la solucin de la ecuacin (13) en el
caso, cuando el operador es totalmente continuo, aplica el espacio de Banach
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 173
7 en el espacio de Banach l, adems el espacio 7 es tal que cada bola no es un
conjunto compacto. Mostremos que en este caso el operador no tiene un operador
continuo inverso
l
. Supongamos, que esto no es asi, el operador
l
existe y es
continuo. Veamos en el espacio 7 la bola o. Como la bola o no es compacta, entonces
existe una sucesin .
n
o , tal que, de ella no se puede extraer una subsucesin,
que converja hacia cierto elemento. Por otro lado, el conjunto o es acotado, y el
operador es totalmente continuo. Consecuentemente, el conjunto o es compacto
en l y de la sucesin n
n
= .
n
o se puede extraer una subsucesin n
n
= .
n
o, que converje hacia cierto elemento n
o
. Como por hipotesis el operador
l
es
continuo, entonces la sucesin .
n
=
l
n
n
converje hacia cierto elemento
l
n
o
,
que contradice nuestras suposiciones originales. De esta manera el operador no
tiene un operador inverso continuo
l
y el problema de la solucin de la ecuacin
( ) no es correcto.
La ecuacin ( ) con el operador lineal y totalmente continuo usualmente
se llama ecuacin operacional lineal de primera clase, a la ecuacin . . = n
se denomina ecuacin operacional lineal de segunda clase. Como ya se discutio, el
problema de solucin de la ecuacin de primer clase, bajo las condiciones de que
una bola en el espacio 7 no es compacta, es un problema MAL PUESTO. Al mismo
tiempo del teorema de Fredholm se desprende, que la solucin del problema de la
ecuacin de segunda clase es un problema bien puesto, siempre y cuando el operador
no tenga como valor propio a ` = 1 y es mal puesto en caso contrario.
0.2. SOBRE CIERTOS ASPECTOS DE LA FORMULACION Y
SOLUCION DE LOS PROBLEMAS INVERSOS.. Los conceptos y ejem-
plos, mostrados en el parrafo anterior, muestra, que los problemas inversos, que
aparecen a travs de la recoleccin de resultados experimentales, como regla gener-
al, son problemas que no estan colocados correctamente.
En relacin con las preguntas sobre la existencia y unicidad de la solucin de estos
problemas e incluso la dependencia continua de los datos de entrada del proble-
ma inverso, exige un analisis posterior. Este analisis se puede llevar a cabo para el
planteamiento abstrato del problema inverso en forma de la ecuacin operacional
. = n.
174 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
La investigacin de cualquier problema inverso, esta unida con el estudio de
cierto objeto real o proceso, este estudio se lleva a cabo a travs de algn modelo
matemtico. Esto signica, que la seleccin del operador , la clase de elementos 7,
que contiene la caracterstica no conocida ., la clase l, a la cual pertenece la parte
derecha de la ecuacin ,n; se dene por el tipo de informacin experimental que se
tenga para la solucin del problema inverso. Por esto se supone, que en la clase l
existe el elemento n = ., que se intenta medir en el experimento. Sin embargo,
como en cualquier experimento la medicin se lleva a cabo con cierto error, asi que
el elemento n no es conocido y en su lugar se da un elemento aproximado n y la
magnitud de error c, que caracteriza la cercana de n con n en cierta mtrica.
De esta manera, en la formulacin del problema tiene un signicado especial
la unicidad y la estabilidad de la solucin del problema inverso. La investigacin
de la unicidad de la solucin del problema inverso, en la mayora de los casos, da
respuesta a la pregunta si es suciente la informacin experimental para la denicin
univoca de la caracterstica buscada del objeto bajo estudio. El problema de la
estabilidad de la solucin del problema inverso esta ligada con la construccin de
mtodos que permitan determinar de manera aproximada la solucin ., cercana a
., basandonos en la informacin que se tiene, la informacin aproximada n y el
error de aproximacin c.
En el trabajo de A. N. Tixonov se propone un algoritmo el cual evita la inesta-
bilidad de la solucin del problema inverso, el algoritmo se basa fundamentalmente
en el empleo de la informacin apriori sobre la solucin exacta .. La informacin
apriori sobre la solucin exacta frecuentemente se tiene a travs del anlisis de difer-
entes problemas inversos. Por regla general esta informacin esta basada en que la
caracterstica buscada representa alguna magnitud sca, que tiene propiedades
denidas. Por ejemplo que es positiva, que es montona, con derivada acotada y
otros. Este tipo de informacin apriori permite en una serie de casos disminuir la
clase de elementos 7, a la cual pertenece la solucin exacta ., hasta cierto conjunto
', sobre el cual la solucin del problema inverso es estable. La fundamentacin de
este camino para llegar a una solucin estable del problema inverso es el siguiente
teorema.
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 175
Teorema 2. Sea el conjunto ' que pertenece a cierto espacio metrico 7, el
cual se aplica biunivocamente a travs del operador sobre el conjunto que
pertenecea a cierto espacio l. Entonces si el operador es continuo sobre ' y '
es compacto, entonces el operador inverso
l
es continuo sobre .
Demostracin.
Asi como el conjunto = ' es la imagen biunivoca del conjunto ', entonces
el operador
l
en el conjunto existe. Mostremos, que el es continuo sobre .
Supongamos que esto no es asi. Entonces existe un elemento n
o
y una sucesin
de elementos n
n
, : = 1, 2, . . . tales, que j(n
n
, n
o
) 0 para : , al mismo
tiempo como
j(.
n
, .
o
) _ c 0, : = 1, 2 . . .
donde .
n
=
l
n
n
, .
o
=
l
n
o
. Ya que la sucesin .
n
pertenece al conjunto '
y ' es un compacto, entonces de .
n
se puede extraer una subsucesin .
n
, tal
que j(.
n
, .) 0 para : , donde el elemento . '. Entonces de (14) se
desprende que j(.
o
, .) c. Asi como el operador es continuo en ', y j(.
n
, .)
0 y j(.
n
, n
o
) 0 para : , entonces j( ., n
o
) = 0.
Consecuentemente . = .
o
= n
o
, por lo tanto . = .
o
(la aplicacin es
biunivoca), adems de (14) tenemos que j( ., .
o
) _ c.
De esta manera, la armacin original no es correcta y el teorema queda
demostrado.
La idea de contraer la clase de soluciones posibles del problema inverso hasta
cierto conjunto, sobre el cual la solucines estable, se basa en el concepto de
correctitud segn Tjonov, introducido por M.M. Lavrentev o conocido tambin
como correctitud condicional del problema.
El problema de la solucin de la ecuacin ( ) se llama bien planteado o correc-
tamente planteado segn Tjonov, si se cumplen las siguientes condiciones:
Apriori se conoce que la solucin de la ecuacin existe y adems pertenece
a cierto conjunto ', que pertenece al espacio 7.
La solucin de la ecuacin es nica sobre el conjunto '.
176 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
Existe una dependencia continua de la solucin de la ecuacin (1) de la parte
derecha n, cuando la variacin de n no hace que salga la solucin de los lmites del
conjunto '.
El conjunto ' que satisface estas condiciones se llama conjunto de correcti-
tud. Cabe anotar que para la mayora de los problemas inversos es caracterstico
que esta informacin sea desconocida (que la solucin pertenezca a cierto conjunto
' sobre el cual la solucin del problema sea estable).
Sea 7 y l ciertos espacios normados. En el caso cuando el problema de la de
la ecuacn . = n esta bien puesto condicionalmente y el conjunto ' es compacto
en 7 , es posible construir una cota para la estabilidad de la solucin del problema
inverso [4]. Esta posibilidad se basa en el siguiente teorema.
Teorema 3. Sea A un operador que aplica el compacto ' 7 continuamente
y biunivoacamente sobre el conjunto = ' l. Entonces existe una funcin
.(t) continua en cero, .(0) = 0, tal que para todos los .
l
, .
2
' se cumple la
acotacin
(0.27) |.
l
.
2
| _ .(|.
l
.
2
|)
Demostracin. Supongamos que la funcin .(t) que satisface la condicin decrita
arriba no existe. Entonces para cualquier nmero natural : se puede encontrar los
elemetos .
l
n
, .
2
n
', y la sucesin t
n
0 cuando : y el nmero c 0, tales
que
|.
l
n
.
2
n
| _ t
n
,
|.
l
n
.
2
n
| _ c. (0.28)
Ya que las sucesiones .
l
n
y .
2
n
pertenecen al compacto ', entonces de ellos se
puede extraer las sucesiones .
l
n
y .
2
n
, convergentes hacia cierto elementos .
l
y
.
2
respectivamente los cuales pertenecen a '. Entonces del acotamiento (16) se
desprende, que |.
l
.
2
| = 0 y dado que es biyectivo sobre M tenemos
.
l
= .
2
. Pero de la desigualdad (17) se desprende, que |.
l
.
2
| c . Esto es una
contradicin, de esta manera el teorema queda demotrado.
El acotamiento de tipo ( ), obtenido bajo el supuesto que la solucin pertenece
a cierto conjunto ', se denomina acotamiento condicional de estabilidad.
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 177
La forma anterior de solucin de problemas mal puestos se baso en el empleo
de informacin apriori sobre la pertenecia de la solucin a cierto conjunto '. Si
embargo, para muchos problemas inversos es caracterstico que esta informacin
se desconozca (que la solucin pertenezca a cierto conjunto ' sobre el cual la
solucin del problema sea estable). Para la construcin de soluciones aproximadas
de problemas mal puestos en esta situacin se emplea fundamentalmente el concepto
de regularizacin del operador [79,81].
Veamos el problema de la solucin de la ecuacin . = n, donde es un
operador, que aplica 7 en l (7 y l espacios normados).
Supondremos, que el operador y los espacios 7 y l son tales que el problema
es mal puesto. Supongamos que para la parte derecha n existe solucin nica ., esto
es, . = n. Sin embargo, el elemento n no es conocido, y en lugar de el se da n
o
y la magnitud del error c, tales que, |n
o
n| _ c. Se debe construir la solucin
aproximada de la ecuacin, .
o
la cual debe converger hacia la solucin exacta .
cuando la magnitud del error tiende hacia cero. Ya que el problema es mal puesto,
entonces para la construccin de la solucin aproximada no se puede emplear el
operador inverso, esto es tomar en calidad de .
o
el elemento
l
n
o
, debido a que
el operador inverso puede no estar denido sobre n
o
y no ser continuo sobre l.
Para determinar la solucin aproximada es natural pensar que se debe emplear
toda la informacin, esto es, n
o
y la magnitud del error c.
DEFINICION. El operador 1(n, c), que actua del espacio l al espacio 7, se
llama operador de regularizacin de la ecuacin . = n (con respecto al elemento
n) si el tiene las siguientes propiedades:
1. Existe un nmero c
l
0, tal que, el operador 1(n, c) esta denido para
todos los c [0, c
l
[, y satisface la condicin |n
o
n| _ c;
2. para cualquier c 0 existe un nmero c
o
(c, n
o
) _ c
l
, tal que de la desigualdad
|n
o
n| _ c _ c
o
se cumple la desigualdad |.
o
.| _ c, donde .
o
= 1(n
o
, c).
En esta denicin se permite que el operador 1(n, c) tome varios valores. Por
.
o
se representa un elemento cualquiera del conjunto de valores 1(n, c).
En la teora de los mtodos aproximados es tipica la situacin cuando un mtodo
concreto de aproximacin depende de cierto parmetro. Este puede ser el paso de la
178 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
red, el nmero de iteraciones, etc. En base a esto es frecuente emplear el siguiente
esquema de construccin del operador de regularizacin. Se da cierta familia de
operadores 1(n, c), que actuan de 7 en l y dependen de cierto parmetro c.
Despues el parmetro c se selecciona dependendiendo de c y n
o
: (c = c(c, n
o
)) de
tal manera que 1(n
o
, c(c, n
o
)) ., para c 0.
Detengamos en el enlace entre el problema de solucin del problema inverso con
la interpretacin de la observacin y del modelo matemtico. Como ya se recalco
anteriormente, los problemas inversos se resuelven tomando en consideracin cierto
modelo matemtico el cual describe el objeto o el proceso. Aunque para la investi-
gacin de un proceso concreto es frecuente que la forma del modelo no se conozca
asi que se toma cierto modelo y ms tarde se rena en el proceso de solucin del
problema inverso. Esto se debe a que un mismo proceso puede ser descrito por difer-
entes modelos matemticos, uno mas simple que no toma en consideracin ciertos
factores o unos ms sosticado que toma en cuenta estos factores. Es necesario decir
que al tomar un modelo se dene una clase a la cual pertenece la magnitud, que esta
sujeta a la solucin del problema inverso. Para un modelo simple esta puede ser una
constante o varias o bien una funcin que depende de una variable o de varias. Con
el aumento de la cantidad de informacin experimental y el mejoramiento de su
calidad (aumento de la exactitud de las observaciones), como regla , para la inter-
pretacin del experimento es necesario tomar un modelo matemtico ms completo
(total) y resolver el problema inverso bajo este modelo.
Mtodo de seleccin de la solucin de problemas mal puestos.
Sea la ecuacin de primera clase
. = n . 1, n l
para . es conocido de antemano cierta clase ', soluciones posibles de (1), ' 1.
En calidad de solucin aproximada se toma .
o
' la cual minimiza el defecto
|. n|, esto es
|.
o
n| = inf
:1
|. n|
I
Supongamos que se conoce n
troc|
y se debe determinar .
troc|
. Usualmente en
calidad de ' se toma el conjunto de elementos . que dependen de un nmero nito
de parmetros que varian dentro de ciertos lmites acotados, de tal manera que '
sea acotado y cerrado en el espacio de dimensin nita.
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 179
Supongamos ahora que n
troc|
se conoce de manera aproximada, esto es se da
n
o
tal que |n
troc|
n
o
| _ c, donde c es la cota superior del error de medicin,
adems n
o
'. Sea c
n
una sucesin de nmeros tales que c
n
0 cuando
: . Entonces por el mtodo de selccin para cada : encontramos .
o
n
, tal que
|.
o
n
n
o
| _ c
n
Los elementos .
o
n
son elementos cercanos a .
troc|
, esto es asi ya que ' es com-
pacto, por lo tanto
l
es continuo sobre ', de tal manera que
|.
o
n
n
troc|
| _ |.
n
n
o
| |n
o
n
troc|
| _ c
n
c =
o
n
por lo tanto de la continuidad de
l
se desprende que |.
o
n
.
troc|
| _ c(
o
n
);
adems c(
o
n
) 0 cuando
o
n
0.
EJEMPLO. Consideremos el siguiente modelo
_
a(r)n
0
(r)
_0
= )(r), 0 < r < 1 (0.29)
a(0)n
0
(0) = /
o
, a(1)n
0
(1) = /
l
(0.30)
El problema inverso consiste en la identicacin del coeciente a(r) a travs de la
informacin suplementaria sobre n(r).
Denotemos como n
o
(r) la solucin del problema ( )-( ) con coeciente a(r)
y n
b
(r) tambin solucin de ( )-() pero ahora con coefciiente /(r). Integrando la
ecuacin () de 0 a r tenemos
a(r)n
0
o
(r) a(0)n
0
o
(0) =
r
_
0
)(:)d:,
/(r)n
0
b
(r) /(0)n
0
b
(0) =
r
_
0
)(:)d:
restando estas dos ecuaciones
a(r) /(r) = /
o
_
n
0
b
(r) n
0
o
(r)
_
_
_
_
_
/
o
r
_
0
)(:)d:
n
0
o
(r)n
0
b
(r)
_
_
_
_
A partir de esta expresin observamos que si n(r) lo medimos de tal forma que sus
derivadas permanezcan cercanas podemos asegurar que los respectivos coecientes
permaneceran cercanos.
180 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
Supongamos por simplicidad que /
o
= 0. Dado que n y ) satisfacen (), nosotros
buscaremos la solucin del problema inverso de la forma
(0.31) a
|
=
=l
c
(|)
,
donde / =
l
, para un entero dado y
_
,
=l
una familia de funciones lineales
a tramos, ver gura
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
0.0
0.2
0.4
0.6
0.8
1.0
x
y
Grca de funciones lineales a tramos
OTROS EJEMPLOS
1. Encontrar un polinomio j de grado : que tiene ceros r
l
, r
2
, . . . , r
n
. Este
problema es inverso al problema directo: Encontrar los ceros r
l
, r
2
, . . . , r
n
que tiene
el polinomio j. En este ejemplo el problema inverso es fcil de resolver, la solucin
es:
j (r) = C (r r
l
) (r r
2
) (r r
n
) ,
donde C es una constante arbitraria.
2. Encontrar un polinomio j de grado : que asuma los valores j
l
, j
2
, . . . , j
n
R
para los puntos r
l
, r
2
, . . . , r
n
R. Este problema es inverso al problema directo de
calcular el valor del polinomio en los puntos r
l
, r
2
, . . . , r
n
. El problema inverso es
el problema de Interpolacin de Lagrange. Recordemos en que consiste el problema
de interpolacin de Lagrange: Si r
0
, r
l
, . . . , r
n
son :1 nmeros distintos y si ) es
una funcin cuyos valores estan dados en esos nmeros, entonces existen un nico
polinomio j de grado a lo ms :, con la propiedad de que
) (r
|
) = j (r
|
) para / = 0, 1, 2, . . . :.
Este polinomio est dado como
j (r) = ) (r
0
) 1
n,0
(r) ) (r
n
) 1
n,n
(r) =
n
|=0
) (r
|
) 1
n,|
(r) ,
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 181
donde
1
n,|
=
(r r
0
) (r r
l
) (r r
|l
) (r r
|l
) (r r
n
)
(r
|
r
0
) (r
|
r
l
) (r
|
r
|l
) (r
|
r
|l
) (r r
n
)
=
n
I=0
I,=|
(r r
I
)
(r
|
r
I
)
,
para cada / = 0, 1, 2, . . . , :. Veamos una pequea ilustracin del problema de In-
terpolacin de Lagrange: Dadas las parejas (2, 0,), (2,, 0,4) y (4, 0,2) construir
un polinomio j de grado dos que interpole los puntos. Primero determinemos los
coecientes polinmicos 1
0
(r), 1
l
(r), 1
2
(r):
1
0
(r) =
(r 2,) (r 4)
(2 2,) (2 4)
= (r 6,) r 10,
1
l
(r) =
(r 2) (r 4)
(2, 2) (2, 4)
=
(4r 24) r 82
8
, y
1
2
(r) =
(r 2) (r 2,)
(4 2) (4 2,)
=
(r 4,) r
8
.
Puesto que ) (r
0
) = ) (2) = 0,, ) (r
l
) = ) (2,) = 0,4 y ) (r
2
) = ) (4) = 0,2,
tendremos
j (r) =
2
|=0
) (r
|
) 1
|
(r)
= 0, [(r 6,) r 10[ 0,4
_
(4r 24) r 82
8
_
0,2
_
(r 4,) r
8
_
= (0,0r 0,42) r 1,1.
3. Sea una matriz simtrica de orden :: y sean : nmeros reales `
l
, `
2
, . . . , `
n
.
Encontrar una matriz diagonal 1 tal que 1 tenga los valores `
l
, `
2
, . . . , `
n
.
Este problema es inverso al problema directo de calcular los eigenvalores que tiene
la matriz 1.
Dados los primeros trminos a
l
, a
2
, . . . , a
|
de una secuencia, encontrar la ley de
formacin de la secuencia; es decir, encontrar a
n
para todo :. El correspondiente
problema directo es evaluar la secuencia (a
n
) dada su ley de formacin.
DETERMINACIN DE COEFICIENTES DE LAS ECUACIONES
DIFERENCIALES ORDINARIAS.
Una clase importante de problemas inversos para las ecuaciones diferenciales lin-
eales simples forman los problemas de identicacin de coecientes a partir de la
182 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
solucin. Desde el punto de vista aplicado estos problemas representan problemas
de determinacin de las caracter sticas de las sustancias o de los procesos.
Empecemos nuestra investigacin con un caso simple de un problema inverso para
una ecuacin diferencial de segundo orden homognea con coecientes constantes:
(0.1) j
tt
(r) a
l
j
t
(r) a
0
j(r) = 0, r [c, d[.
Supngase que se conoce una solucin de la ecuacin (1); se deben determinar los
coecientes a
l
y a
0
.
> Si en calidad de informacin se da j(r) = 0, entonces el problema tiene solu-
cin no nica.Por ejemplo, a
o
= 1, a
l
= 2,4; a
o
= 2, a
l
= 7.
> Si en calidad de informacin se da j(r) = co::ta:tc, entonces la solucin sera
a
l
= /; donde / es una constante arbitraria, a
0
= 0 y tendramos en este caso
solucin no nica.
> y = c
r
; determinar a
0
y a
l
. Tomemos r
l
, r
2
[c, d[:
a
l
j
t
(r
l
) a
0
j(r
l
) = j
tt
(r
l
),
a
l
j
t
(r
2
) a
0
j(r
2
) = j
tt
(r
2
),
a
l
c
r1
a
0
c
r1
= c
r1
,
a
l
c
r2
a
0
c
r2
= c
r2
;
tiene tambin innitas soluciones.
OBSERVACION. Dependiendo de la informacin suplementaria, tenemos que nue-
stro problema inversos es mal puesto.
Qu enecsitamos para obtener una solucin nica de nuestro problema inverso?
Formulemos una condicin para la unicidad del problema inverso que consiste en la
identicacin de los coecientes a
o
, a
l
de la ecuacin (1) a travs de la informacin
suplementaria. Supngase que sobre el segmento [c, d[ se conoce la solucin j(r), y
sobre el segmento [c, d[ existen dos puntos r
l
, r
2
[c, d[ tales que
(0.2) j(r
l
)j
t
(r
2
) j(r
2
)j
t
(r
l
) ,= 0;
entonces a
l
, a
0
se determinan unvocamente a travs de la solucin j(r).
Demostremos esta armacin. Ya que la funcin j se conoce en el segmento [c, d[,
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 183
entonces se pueden determinar en los puntos r
I
, i = 1, 2, los valores j(r
I
), j
t
(r
I
),
j
tt
(r
I
). Entonces para el problema podemos plantear el siguiente sistema de ecua-
ciones algebraicas para determinar a
l
y a
0
:
a
l
j
t
(r
l
) a
o
j(r
l
) = j
tt
(r
l
),
a
l
j
t
(r
2
) a
o
j(r
2
) = j
tt
(r
2
);
de la condicin ( ) se desprende que este sistema tiene solucin nica y es igual
a
l
=
j
tt
(r
l
) j
0
(r
l
)
j
tt
(r
2
) j
0
(r
2
)
j(r
l
)j
t
(r
2
) j(r
2
)j
t
(r
l
)
,
a
o
=
j
t
(r
l
) j
tt
(r
l
)
j
t
(r
2
) j
tt
(r
2
)
j(r
l
)j
t
(r
2
) j(r
2
)j
t
(r
l
)
.
Es necesario sealar que a pesar de la simplicidad del problema, este tiene una
enseanza: el problema de determinar a
0
y a
l
(o sea el problema de determinar dos
nmeros) puede tener solucin no nica, incluso en el caso cuando la informacin
dada consiste en una funcin diferente a una constante (o sea se ha medido en un
conjunto innito de sus valores).
PROBLEMA. Conociendo dos soluciones j
l
(r), j
2
(r) de la ecuacin ( ) cor-
respondientes a diferentes condiciones iniciales, determinar los coecientes a
l
, a
0
.
Este planteamiento desde el punto de vista aplicado se puede interpretar como
un problema de planeacin del experimento para determinar las caractersticas a
0
y a
l
. Es decir, cules condiciones iniciales son necesarias tomar para que con el
conocimiento correspondiente a las soluciones garantizar la determinacin binivo-
ca de los coecientes a
0
y a
l
.
LEMA 1.
Sea j
l
(r) y j
2
(r) soluciones de (), con condiciones iniciales
j
l
(0) = 0; j
2
(0) = 1,
j
t
l
(0) = 1; j
t
2
(0) = 0;
184 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
entonces los coecientes a
0
y a
l
se determinan unvocamente.
DEMOSTRACIN.
Ya que j
l
(r) y j
2
(r) son solucin de ( ), entonces el wronskiano
n(j
l
, j
2
) = j
l
(r)j
t
2
(r) j
2
(r)j
t
l
(r)
es igual a cero, o bien no se hace igual a cero en ningn punto de [c, d[. De las
condiciones tenemos que n(j
l
, j
2
) = 1 ,= 0. Por lo tanto tenemos que n(j
l
, j
2
) ,= 0
\r [c, d[, as que si calculamos j
t
I
(r
0
), j
tt
I
(r
0
), i=1,2, r
0
[c, d[, y colocamos estos
valores en ( ) obtenemos:
a
l
j
t
l
(r
0
) a
0
j
l
(r
0
) = j
tt
l
(r
0
),
a
l
j
t
2
(r
0
) a
0
j
2
(r
0
) = j
tt
2
(r
0
).
De aqu determinamos a
0
y a
l
.
EJEMPLO 4.
Consideremos la ecuacin diferencial ordinaria
(0.3) j
(n)
(r) a
nl
(r)j
(nl)
(r) . . . a
0
(r)j(r) = )(r).
Supongamos que los coecientes a
I
(r) i = 0, 1, 2, . . . , : 1, y la parte derecha son
funciones continuas sobre el segmento [c, d[. Supongamos a
I
(r) i = 0, 1, 2, . . . , :
1, y la parte derecha desconocida. Qu informacin es necesaria dar sobre las
soluciones de la ecuacin () para determinar estas funciones unvocas? La primera
respuesta la da el siguiente teorema, que es una consecuencia de la teora general
sobre las ecuaciones diferenciales ordinarias.
TEOREMA 2. Supongamos que sobre el segmento [c, d[ se dan las soluciones de
(8), j
I
(r) i = 0, 1, 2,. . . , :, tales que el determinante de wronskiano
n(j
l
, j
2
, . . . , j
n
)[
r=c
,= 0, (0.4)
j
(I)
0
(c) = 0, i = 0, 1, 2, . . . , : 1; (0.5)
entonces las funciones a
I
(r), i = 0, 1, 2, . . . , : y )(r) se determinan unvocamente
sobre el segmento [c, d[.
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 185
DEMOSTRACIN.
Consideremos las funciones
I
(r) = j
I
(r) j
0
(r) i=0,1,2,. . . , : 1, las cuales son
soluciones de la ecuacin diferencial ordinaria (8) con parte derecha )(r) = 0. Por
lo tanto, el determinante de wronskiano \(
l
,
2
, . . . ,
n
) o bien es idnticamente
igual a cero o bien es diferente de cero en todo punto r [c, d[. Pero de las condi-
ciones (4) y () se tiene:
\(
l
,
2
, . . . ,
n
)[
r=c
= \(j
l
, j
2
, . . . , j
n
)[
r=c
,= 0.
Por lo tanto, escribiendo en cada punto del segmento [c, d[ la ecuacin para la
funcin
I
(r) i=1,2,. . . , : 1, obtenemos
a
0
(r)
I
(r) a
l
(r)
l
I
(r) . . . a
nl
(r)
nl
I
(r) =
n
I
(r);
en cada punto del segmento [c, d[ se da un sistema de ecuaciones algebraicas respec-
to a las incgnitas a
0
(r), a
l
(r), . . . , a
nl
(r) con determinante diferente de cero. De
aqu determinamos a
0
(r), a
l
(r), . . . , a
nl
(r); conociendo estos coecientes y una
de las soluciones se puede determinar la parte derecha )(r).
Consideremos ahora el problema de identicar los coecientes desconocidos de
un sistema de ecuaciones diferenciales lineales con coecientes constantes. Este tipo
de problemas aparece en diferentes ramas de la ciencia.
EJEMPLO 5.
Consideremos el sistema de ecuaciones diferenciales ordinarias de orden :
(0.6)
dr
dt
= r,
es una matriz con coecientes constantes a
I
, i, , = 1, 2, . . . , :. frmularemos las
condiciones que permiten determinar unvocamente los coecientes del sistema (7)
a
I
a partir de la informacin sobre la solucin de (7).
TEOREMA 3
Si en el segmento [c, d[ se conoce la solucin del sistema (7) r
0
(t) tal que se encuen-
tran los puntos t
|
[c, d[ /=1,2,. . . , : tales que los vectores r
0
(t) son linealmente
186 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
independientes, entonces los coecientes a
I
se determinan de manera nica.
DEMOSTRACIN.
Ya que la solucin r
0
(t) = r
0
l
(t), r
0
2
(t), . . . , r
0
n
(t) es conocida, entonces reem-
plazando estas funciones r
0
l
(t), r
0
2
(t), . . . r
0
n
(t) en (7) para cada t = t
|
, / = 1, 2, 8, . . . , :
obtenemos el sistema de ecuaciones algebraicas respecto a las incognitas a
I
:
a
ll
r
0
l
(t) a
l2
r
0
2
(t) . . . a
ln
r
0
n
(t) =
dr
o
l
dt
(t
|
) (0.7)
a
2l
r
0
l
(t) a
22
r
0
2
(t) . . . a
2n
r
0
n
(t) =
dr
o
2
dt
(t
|
) (0.8)
a
nl
r
0
l
(t) a
n2
r
0
2
(t) . . . a
nn
r
0
n
(t) =
dr
o
n
dt
(t
|
)
Consideremos el sistema para la determinacin de los coecientes a
l
, , = 1, 2, ..:.
Este sistema corresponde a ( ) evaluado en los puntos t
|
, / = 1, 2, ..:, ya que los vec-
tores (r
0
l
(t
l
), r
0
2
(t
l
), . . . , r
0
n
(t
l
)), (r
0
l
(t
2
), r
0
2
(t
2
), . . . , r
0
n
(t
2
)), . . ., (r
0
l
(t
n
), r
0
2
(t
n
), . . . , r
0
n
(t
n
))
son linealmente independientes y son los coecientes de la matriz del sistema anteri-
or, por lo tanto el sistema tiene solucin nica. De esta manera podemos continuar
nuestro procedimiento para detrminar el resto de los a
I
.
Consideremos el problema de determinar los coecientes del sistema de ecuaciones
diferenciales lineales en el caso cuando estos coecientes dependen del tiempo.
Consideremos el sistema
dr
dt
= (t)r.
Formulemos las condiciones que permiten determinar de manera nica los coe-
cientes a
I
(t) a travs de la solucin de este sistema.
TEOREMA 4.
Supongamos que en el segmento [c, d[ se dan : soluciones vectoriales del sistema
(8) r
|
(t), / = 1, 2, . . . , :, que satisfacen las condiciones r
|
(c) = /
|
/ = 1, 2, . . . , :,
donde /
|
son vectores dados; si los vectores /
|
son linealmente independientes, en-
tonces los coecientes a
I
(t) i, , = 1, 2, . . . , : son nicos en el segmento [c, d[; la
determinacin de los coecientes se realiza de igual forma como en el caso anterior.
EJEMPLO. Consideremos ahora los problemas que aparecen cuando la informa-
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 187
cin suplementara es conocida de manera aproximada. Sea
j
tt
(r) a
l
(r)j
t
(r) a
0
(r)j(r) = 0, r [0, 1[, (0.9)
j(0) = j
0
, j
t
(0) = j
l
. (0.10)
Determinar el coeciente a
l
(r) si se conocen a
0
(r), j
0
y j
l
. Supongamos que en
lugar de la solucin exacta j(r) del problema ( ) y ( ) se da la funcin j
o
(r)
C[0, 1[, y el nmero c tal que
|j(r) j
o
(r)| < c;
para determinar a
l
se puede emplear la frmula
(0.11) a
l
=
a
0
(r)j(r) j
tt
(r)
j
t
(r)
;
como se oprecia en ( ), debemos en primer lugar determinar las derivadas j
t
(r)
y j
tt
(r), y como fue discutido anteriormente, este es un problema mal puesto. Por
lo tanto determinar el coeciente a
l
(r) es un problema mal puesto. Es de anotar
que si j
t
(r) se hace igual a cero en algn punto r
0
[0, 1[, signica que el valor
aproximado de la derivada calculado a partir de la funcin j
o
(r) en los correspon-
dientes puntos ser cercano a cero en el segmento [0, 1[. Como consecuencia pueden
aparecer errores substanciales en la solucin en el intervalo del cero de la funcin
j
t
(r) (esto se discutir en los experimentos numricos).
PROBLEMAS INVERSOS PARA LAS ECUACIONES DIFERENCIALES
ORDINARIAS CON PARMETRO
Los problemas inversos para las ecuaciones diferenciales lineales que contiene un
parmetro forman una clase importante de problemas inversos. El inters para su
estudio se basa en el hecho de que ellos tienen un valor prctico en muchas de las
esferas de la ciencia; por otro lado, ellos tambin aparecen cuando se investigan
problemas inversos para las ecuaciones diferenciales en derivadas parciales.
El planteamiento tpico de los problemas inversos para las ecuaciones diferenciales
con parmetro ` consiste en lo siguiente: se debe determinar un coeciente de la
ecuacin diferencial que depende de r a travs de informacin suplementaria de la
solucin del problema, la cual es una funcin que depende del parmetro `.
Anotemos que la diferencia sustancial de este problema respecto a los problemas
188 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
anteriores consiste en que la funcin buscada y la funcin dada dependen de difer-
entes variables.
Consideremos la ecuacin
j
t
(r, `) `c(r)j(r, `) = )
0
, 0 _ r _ 1, (0.12)
j(0, `) = j
0
, (0.13)
)
0
, j
0
constantes, ` es un parmetro. Se debe determinar la funcin c(r) C[0, 1[
si las constantes )
0
, j
0
son conocidas y ` [`
l
, `
2
[; se conoce ,(`) = j(1, `),
donde j(r, `) es la solucin de (1), (2). Como siempre, surge la pregunta de bajo
qu condiciones la solucin de este problema inverso es nica.
Integrando (1) tenemos
j(r, `) = j
0
c
X
R
o
0
o(0)J0
)
0
_
r
0
c
X
R
o
o(0)J
;
si )
0
= 0, la solucin del problema inverso no es nica, ya que
j(1, `) = ,(`) = j
0
c
X
R
1
0
o(0)J0
, ` [`
l
, `
2
[.
Si c(r) es solucin de (4) entonces c(r) = c(r)c cos r sera tambin una solucin,
donde c es una constante arbitraria:
j
0
c
X
R
o
0
o(0)c cos t0J0
= ,(`),
j
0
c
X
R
o
0
o(0)J0
j
0
c
X
R
o
0
c cos t0J0
= ,(`),
c
|sIn t0|
1
0
= 1.
Investiguemos la unicidad de la solucin del problema de la determinacin de la
funcin c(r) en el caso de que la ecuacin sea no homognea ()
0
,= 0) y con condi-
cin inicial homognea j = 0.
De (8) tenemos la ecuacin para la determinacin de c(r):
_
l
0
c
X
R
1
o(0)J0
d = ,(`), ` [`
l
, `
2
[,
donde ,(`) =
,(`)
)
0
es una funcin conocida.
Si c
l
(r) = 2r 8r
2
y c
2
(r) = 1 4r 8r
2
, entonces
_
l
0
c
X
R
1
o1(0)J0
d =
_
l
0
c
X
2
(l)
d;
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 189
haciendo el cambio de variable = 1 . obtenemos
_
l
0
c
X
R
1
o1(0)J0
d =
_
l
0
c
X:(l:
2
)
d.
=
_
l
0
c
X
R
1
z
o2(0)J0
d.;
por lo tanto, c
l
(r) ,= c
2
(r) en [0, 1[ y
,(`) =
_
l
0
c
X
R
1
o1(0)J0
d =
_
l
0
c
X
R
1
o2(0)J0
d,
y el problema inverso tiene solucin no nica en la clase de funciones c(r) C[0, 1[.
TEOREMA 5.
Existe no ms de una nica solucin de la ecuacin () en la clase de funciones
continuas en [0, 1[ y positivas, es decir c(r) C[0, 1[, c(r) 0 \r [0, 1[.
DEMOSTRACIN.
Supongamos que existen dos funciones c
l
(r) y c
2
(r) continuas y positivas en el
segmento [0, 1[, las cuales son soluciones de la ecuacin (). Consideremos las fun-
ciones
,
I
() =
_
l
c
I
(0)d0, i = 1, 2.
Estas funciones tienen las siguientes propiedades:
> ,
I
(r) C
l
[0, 1[;
> ,
I
(r) 0 para r [0, 1[.
Ya que c
l
(r) y c
2
(r) son soluciones de la ecuacin (), entonces para ` [`
l
, `
2
[
se cumple la igualdad
_
l
0
c
Xo
1
()
d =
_
l
0
c
Xo
2
()
d.
Hagamos el cambio de variable t = ,
I
(), t
0
= ,
I
(0); t
l
= ,
I
(1) = 0:
_
0
o
1
(0)
c
X|
c
l
(t)dt =
_
0
o
2
(0)
c
X|
c
2
(t)dt, ` [`
l
, `
2
[,
c
I
(t) =
1
,
I
(,
l
I
(t)
,
donde ,
l
I
(t) es la funcin inversa de ,
I
(c).
190 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
Mostremos que de la igualdad (7) se desprende que ,
l
(0) = ,
2
(0).
La funcin c
:|
donde . es un nmero complejo es una funcin analtica en todo el
plano complejo para cualquier valor del parmetro real t.
Las funciones c
l
(t) y c
2
(t) son continuas en los segmentos [,
l
(0), 0[ y [,
2
(0), 0[,
correspondien- temente. Por lo tanto, empleando el teorema sobre la analiticidad so-
bre la integral de una funcin compleja obtenemos que las funciones que aparecen
al tomar la integral son funciones analticas del parmetro `. Entonces del teo-
rema sobre la unicidad para funciones analticas se desprende que la igualdad (7)
se cumple para cualquier valor complejo `, en particular para cualquier valor real `.
Supongamos que ,
l
(0) ,= ,
2
(0). Sea para ,
l
(0) < ,
2
(0); entonces, para _
` _ tenemos
_
o
2
(0)
o
1
(0)
c
X|
c
l
(t)dt =
_
0
o
2
(0)
c
X|
[c
2
(t) c
l
(t)[dt.
Introduciremos las siguientes representaciones:
: = min
o
1
(0)|o
2
(0)
[c
2
c
l
[
' = max
o
2
(0)|0
[c
2
c
l
[.
De la positividad de c
l
(t) se desprende que : 0. De (8) obtenemos que para
cualquier ` real se cumple la desigualdad
_
o
2
(0)
o
1
(0)
c
X|
dt _
'
:
_
0
o
2
(0)
c
X|
dt,
1
`
_
c
o
2
(0)X
c
o
1
(0)X
_
_
'
:
_
1 c
o
2
(0)X
_
.
Es claro que esta desigualdad no se cumple para valores negativos, ya que el valor
absoluto sera muy grande; tomando ,
l
(0) = ,
2
(0) = ,, entonces de la desigualdad
(7) obtenemos que
_
0
o
c
X|
cdt, _ ` _ ,
c(t) = c
l
(t) c
2
(t). El sistema de funciones c
X|
( _ ` _ ) es completo
en el espacio |
2
[,, 0[; entonces de (0) se desprende que ,(t) = n, y por lo tanto
,
l
(t) = ,
2
(t) \t [,, 0[.
Las funciones ,
I
(t) son las derivadas de las funciones ,
l
I
(t); por lo tanto,
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 191
_
,
l
l
(t)
_
t
=
_
,
l
l
_
t
(t) \t [,, 0[, ,
l
l
(t) = ,
l
2
(t) = 1; entonces ,
l
l
(t) = ,
l
2
(t) =
1 \t [,, 0[, y por lo tanto ,
l
l
(c) = ,
l
2
(c) \c [0, 1[.
Teniendo en cuenta (6) obtenemos que c
l
(r) = c
2
(r) \r [0, 1[.
Veamos de nuevo la ecuacin ():
_
l
0
c
X
R
1
o(0)J0
d = ,(`), ` [`
l
, `
2
[;
consideremos el operador lineal
c =
_
l
0
c
X
R
1
o(0)J0
d;
entonces el problema de determinar c(r) lo podemos considerar como la solucin
de la ecuacin
c = c.
Mostremos que este problema es mal puesto. Sea c
l
= 2; c
2
= 2cos :r, r [0, 1[;
entonces
|c
l
c
2
|
c|0,l|
= 1,
|c
l
c
2
|
l2|0,l|
=
1
_
2
;
por otro lado,
c(`) c(`) =
_
l
0
c
X
R
1
o1(0)J0
d
_
l
0
c
X
R
1
or(0)J0
d
=
_
l
0
c
2X(lr)
d
_
l
0
c
2X(lr)X
sin r;
r
d,
y por lo tanto
|
c
l
(`) c
n
(`) |
c|X1,X2|
0, : .
Regularizacin de Tjonov
El problema inverso consiste en encontrar n resolviendo la ecuacin
(0.14) n = )
192 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
con datos de entrada y ) obtenidos experimentalmente. Para este caso, en calidad
de ) se toma frecuentemente los valores de las variables de estado del proceso en
ciertos puntos de la regin \. Esos puntos pueden ser jos o cambiar su posicin
con el tiempo. El enfoque variacional para la solucin del problema (1) consiste en
minimizar la funcional del residuo
(0.15) J(n) =
|n )|
2
J
2
sobre el conjunto 1 'l el cual contiene la solucin exacta , donde ||
J
es la norma
en el espacio 1.
Como se discutio anteriormente este mtodo no puede ser aplicado directamente
para la solucin de problemas de identicacin paramtrica debido a que el prob-
lema () es usualmente inestable (el operador inverso
l
resulta ser no acotado).
Es frecuente que en lugar de los datos de entrada y ) especicados de manera
exacta, en la practica slo sean conocidos de manera aproximada. Denotemoslos
como
|
y )
o
.
Teniendo en cuenta las observaciones anteriores, el problema de identicacin
queda reducido a determinar cierta solucin aproximada n
|o
de la solucin buscada
a travs del conjunto
|
y )
o
que garantice la mejor aproximacin (en cierto sentido)
a la solucin exacta del problema () cuando los errores de aproximacin del operador
y ) tiendan hacia cero.
PLANTEAMIENTO DE UN PROBLEMA DE OPTIMIZACION
PARA EL CASO DE ESPACIOS FUNCIONALES
Sea l un conjunto dado, donde se dene una funcin J(n) en l. Se quiere
encontrar el inmo de J(n) con n l. Para estas situaciones existen dos tipos de
problemas:
(a) Se busca la magnitud J
+
=inf J(n), sin interesarnos si se alcanza en cierto
punto de l o bien si este punto no pertenece a l. Este problema se llama de tipo
I.
(b) En los problemas llamados tipo II se busca no solo J
+
si no tambien el
punto n
+
; esto es en l
+
= n : n l, J(n) = J
+
.
Es claro que en el problema I es natural suponer que J
+
, y en el problema
II ademas l
+
,= c.
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 193
Obtener una solucin exacta de estos problemas es posible en contados casos.
As que demos otra denicin de estos dos tipos de problemas.
Problema I. Para una exactitud dada - 0, se debe encontrar el nmero J
:
tal que
[J
:
J
+
[ _ -.
En la practica en calidad de J
:
se toma como el valor de la funcin J(n) en
cierto punto n
:
l, osea J(n
:
) = J
:
.
Problema II. Para las exactitudes dadas - 0, c 0 encontrar el punto
n
:,o
l tal que
[J(n
:,o
) J
+
[ _ -, j(n
:,o
, l
+
) _ c
donde j es una mtrica denida por j(n, l
+
)
Jt}
= inf
uI
j(n, ).
OBSERVACION. Para la solucin aproximada del problema (I), es suciente
con la ayuda de algn mtodo de minimizacin construir una sucesin minimizante
n
|
tal que n
|
l, / = 1, 2, 8, ... y lim
|o
J(n
|
) = J
+
y en calidad de la magnitud
desconocida J
:
tomar el valor de la funcin J(n
|
) de tal forma que se satisfaga la
desigualdad del problema I para cierto valor / lo sucientemente grande.
Se puede intentar emplear la sucesin n
|
de la observacin anterior para la
solucin del problema II y como se hace en la practica intentar tomar en calidad
del punto desconocido a n
:,o
de tal manera que se satisfagan las desigualdades del
problema II con cierto valor de / lo sucientemente grande. Sin embargo, aqui de
inmediato surge la pregunta si este punto n
|
ser cercano al conjunto l
+
.
El problema J(n) inf, n l se llama bien puesto en la mtrica j si se
cumple
(a) J
+
=inf J(n) y el conjunto l
+
= n : n l, J(n) = J
+
no es vaco.
(b) Cualquier sucesin minimizante n
|
de este problema converge hacia el
conjunto l
+
.
Si alguna de estas condiciones (a) o (b) de la denicin no se cumple el problema
J(n) inf, n l se llama mal puesto en el sentido amplio.
194 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
DEFINICION. El problema J(n) inf, n l se llama mal puesto en la
mtrica j si se cumple
(a) J
+
< , l
+
= c.
(b) Existe una sucesin minimizante n
|
que no converge hacia el conjunto
l
+
en la mtrica j.
EJEMPLO. Sea J(n) = n
2
(1 n
d
)
l
para n _ 0, J(n) = 0 para n < 0. Sea
l = r R : < r < = 1
l
. Es claro que J
+
= 0, l
+
= n : n _ 0 . La
sucesin n
|
= /, / = 1, 2, 8, ... es una sucesin minimizante ya que
|i:
|0
J(n
|
) = |i:
|0
/
2
(1 /
d
)
= 0
pera esta sucesin no converge hacia l
+
en la mtrica de 1
l
, ademas j(n
|
, l
+
) =
/ , y por lo tanto este ejemplo es un problema mal puesto.
EJEMPLO. Supngase que se desea minimizar la funcin J(n) =
_
l
0
r
2
(t)dt
sujeto a
dr
dt
= n(t), r(0) = 0 con 0 _ t _ 1. Busquemos la solucin en el conjunto
de funciones integrables que satisfacen la desigualdad [n(t)[ _ 1.
El inmo de J(n) =
_
l
0
r
2
(t)dt es igual a cero, esto es J
+
= 0 y este valor se
alcanza en las funciones n
+
(t) iguales a cero casi en todo 0 _ t _ 1; Si miramos la
sucesin n
|
(t) = sin(2/t), 0 _ t _ 1, / = 1, 2, 8, ... es una sucesin minimizante
para este problema. Sin embargo n
|
(t) no converge hacia n
+
(t) = 0 en la norma
1
2
[0, 1[ y por lo tanto tenemos un problema mal puesto.
EJEMPLO. Consideremos el problema de minimizar la funcin J(n) =
_
l
0
n
2
(t)dt
en el conjunto l = C[0, 1[. aqui J
+
= 0 y l
+
consiste de un nico punto n
+
= 0.
Tomemos cualquier sucesin minimizante n
|
(t) C[0, 1[, lim
|o
_
l
0
n
2
|
(t)dt = 0.
Ahora |n
|
n
+
|
2
J2
=
_
l
0
n
2
|
(t)dt 0 cuando / . Esto signica, que cualquier
sucesin minimizante converger hacia el punto optimo en la norma de 1
2
[0, 1[.
ALGORITMO DE REGULARIZACION. Sea cierta familia de oper-
adores 1(n, c), que actun de 7 en l y dependen de cierto parmetro c. De-
spes el parmetro c se selecciona dependiendo de c y n
o
(c = c(n
o
, c)) que
1(n
o
, c(n
o
, c)) ., cuando c 0.
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 195
En los mtodos de regularizacin de problemas extremale mal puestos el concep-
to de funcin de estabilizador juega un papel importante. La funcin \(n) denida
en cierto conjunto l
:
_ l se llama estabilizador del problema
(2) J(n) inf, n l
En la mtrica j si:
(1) \(n) _ 0 para todo n l;
(2) El conjunto \
c
= n : n l
:
, \(n) _ c es compacto para cualquier c =
co::t _ 0, en otras palabras; de cualquier sucesin n
|
\
c
se puede seleccionar
una sucesin n
n|
que converge hacia cierto punto \
c
;
(3) El conjunto de puntos l
+
:
= l
:
l
+
es diferente de vacio, donde
l
+
= n : n l, J(n) = J
+
, con J
+
=inf J(n).
EJEMPLO. Sea 1
n
el espacio euclidiano de dimensin :. Se debe minimizar
la funcin J(n); n l. El conjunto l _ 1
n
es un conjunto cerrado. Supongamos
que el conjunto l
+
es no vacio. En calidad de estabilizador de este problema se
toma la funcin (no es la nica)
\(n) = [n[
2
=
n
I=l
[n
I
[
2
.
Esta funcin es no negativa en 1
n
. Asumamos l
:
= l con el conjunto \
c
=
n : n l
:
, \(n) _ c cerrado y acotado, entonces es compacto en la mtrica de
1
n
para cualquier c _ 0. Adems l
+
:
= l
:
l
+
= l
+
,= c.
Una de las herramientas efectivas para la solucin de problemas mal puestos es
el mtodo de regularizacin de Tijonov. Para emplear este mtodo es necesario
elegir cierto estibilizador para el problema que se esta considerando. Supngase
que \(n) es uno de estos estibilizadores y esta denido en el conjunto l
:
_ l, se
elige una sucesin positiva c
|
que converge hacia cero y para cada / = 1, 2, 8, ...
en el conjunto l
:
donde se dene la funcin
T
|
(n) = J(n) c
|
\(n), n l
:
que se conoce como la funcin de Tijonov.
Si consideremos ahora los ejemplos dados anteriormente para los cuales deni-
mos la funcin de Tijonov, obtenemos un problema bien puesto.
196 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
Sea J(n) = n
2
(1 n
d
)
l
para n _ 0, J(n) = 0 para n < 0. Sea l =
r R : < r < = 1
l
. Es claro que J
+
= 0, l
+
= n : n _ 0 . La sucesin
n
|
= /, / = 1, 2, 8, ... es una sucesin minimizante ya que
|i:
|0
J(n
|
) = |i:
|0
/
2
(1 /
d
)
= 0
pera esta sucesin no converge hacia l
+
en la mtrica de 1
l
, ademas j(n
|
, l
+
) =
/ , y por lo tanto este ejemplo es un problema mal puesto.
Pero si planteamos la funcin
T
|
(n) = n
2
(1 n
d
)
l
c
|
\(n)
y tomamos en calidad de \(n) = n
2
, el problema se convierte en un problema
bien puesto.
EJEMPLO. Supngase que se desea minimizar la funcional J(n) =
_
l
0
r
2
(t)dt
sujeto a
dr
dt
= n(t), r(0) = 0 con 0 _ t _ 1. Busquemos la solucin en el conjunto
de funciones integrables que satisfacen la desigualdad [n(t)[ _ 1.
El inmo de J(n) =
_
l
0
r
2
(t)dt es igual a cero, esto es J
+
= 0 y este valor se
alcanza en las funciones n
+
(t) iguales a cero casi en todo 0 _ t _ 1 (esto signica,
que Usted puede variar la funcin nula en un conjunto nito de puntos del intervalo
en cuestin). Si miramos la sucesin n
|
(t) = sin(2/t), 0 _ t _ 1, / = 1, 2, 8, ... es
una sucesin minimizante para este problema. Sin embargo n
|
(t) no converge
hacia n
+
(t) = 0 en la norma 1
2
[0, 1[ y por lo tanto tenemos un problema mal puesto.
Pero si cambiamos el problema por
(0.16) T
|
(n) = J(n) c
|
_
l
0
n
2
(t)dt
este problema ser ahora un problema bien puesto.
TIP. Es posible escoger normas ms fuertes en trminos del funcional de
Tjonov. En lugar de ( ) se puede minimizar el funcional
(0.17) T
|
(n) = J(n) c
|
_
l
0
_
n
2
(t)
_
n
0
(t)
_
2
_
dt
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 197
EJEMPLO. Ahora, la derivada de la funcin '
o
[.
l
, .
2
, ..
n
[ est dada como
/
r
/
s
n
|=l
n
I=l
a
I|
a
Il
.
|
c/
s
.
l
c
.
2
.
l
/
s
=
n
I=l
a
Il
n
I
/
r
/
s
/
r
/
s
n
|=l
n
I=l
a
I|
a
I
.
|
c/
s
.
c
.
l
2.
.
l
/
s
=
n
I=l
a
I
n
I
/
r
/
s
, = 2, 8, . . . , : 1
/
r
/
s
n
|=l
n
I=l
a
I|
a
In
.
|
c/
s
.
n
c
.
nl
.
n
/
s
=
n
I=l
a
In
n
I
/
r
/
s
Representemos por /
r
n
|=l
n
I=l
a
I|
a
I
= /
|
, las componentes de la matriz 1, y
las componentes )
del vector ) como
n
I=l
a
I
n
I
/
r
= )
. Por lo tanto se reduce
al problema de resolver el sistema de ecuaciones 1
o
. = 1. cC. = ), donde
C =
_
_
_
_
_
1 1,/
2
s
1,/
2
s
0 ... 0 0
1,/
2
s
1 1,/
2
s
1,/
2
s
... 0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 ... 1,/
2
s
1 1,/
2
s
_
_
_
_
_
.
Iteracin de Landweber. Landweber, Friedman y Bialy sugirieron reescribir
la ecuacin 1r = j en la forma
r = (1 a1
+
1) r a1
+
j
para algn a 0. Construyendo un mtodo iterativo para esta ecuacin tenemos
(0.18) r
0
=: 0 y r
n
= (1 a1
+
1) r
nl
a1
+
j
para : = 1, 2, . . .
Este esquema de iteracin puede ser interpretado como un algoritmo descen-
dente aplicado a la funcional cuadrtica r |1r j|
2
.
Un ejemplo Numrico
En esta seccin, utilizaremos el mtodo de regularizacin de Tjonov para re-
solver la siguiente ecuacin integral de primer orden:
_
l
0
(1 t:) oxp(t:) r(:) d: = oxp(t) , 0 _ t _ 1
con la solucin nica r(t) = 1. El operador 1 : 1
2
(0, 1) 1
2
(0, 1) es dado como
(1r) (t) =
_
l
0
(1 t:) oxp(t:) r(:) d:,
198 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
y es autoadjunto; es decir, 1
+
= 1. Observamos que r no pertenece al rango de
1. Para la evaluacin numrica de 1r, usamos la regla de Simpson, con t
I
=
I
n
,
i = 0, . . . , :. Reemplazando (1r) (t
I
) por
n
=0
n
(1 t
I
t
) oxp(t
I
t
) r(t
) donde n
=
_
_
_
l
3n
, , = 0 o :,
d
3n
, , = 1, 8, . . . , : 1,
2
3n
, , = 2, 4, . . . , : 2,
se obtiene el sistema de ecuaciones:
j (t
0
) = n
0
(1 t
0
t
0
) oxp(t
0
t
0
) r(t
0
) n
l
(1 t
0
t
l
) oxp(t
0
t
l
) r(t
l
)
n
n
(1 t
0
t
n
) oxp(t
0
t
n
) r(t
n
)
j (t
l
) = n
0
(1 t
l
t
0
) oxp(t
l
t
0
) r(t
0
) n
l
(1 t
l
t
l
) oxp(t
l
t
l
) r(t
l
)
n
n
(1 t
l
t
n
) oxp(t
l
t
n
) r(t
n
)
j (t
2
) = n
0
(1 t
2
t
0
) oxp(t
2
t
0
) r(t
0
) n
l
(1 t
2
t
l
) oxp(t
2
t
l
) r(t
l
)
n
n
(1 t
2
t
n
) oxp(t
2
t
n
) r(t
n
)
.
.
.
j (t
n
) = n
0
(1 t
n
t
0
) oxp(t
n
t
0
) r(t
0
) n
l
(1 t
n
t
l
) oxp(t
n
t
l
) r(t
l
)
n
n
(1 t
n
t
n
) oxp(t
n
t
n
) r(t
n
) .
El cual se puede escribir de la forma:
r = j,
en donde
=
_
_
n
0
(1 t
0
t
0
) oxp(t
0
t
0
) . . . n
n
(1 t
0
t
n
) oxp(t
0
t
n
)
n
0
(1 t
l
t
0
) oxp(t
l
t
0
) . . . n
0
(1 t
l
t
n
) oxp(t
l
t
n
)
.
.
.
.
.
.
n
0
(1 t
n
t
0
) oxp(t
n
t
0
) n
0
(1 t
n
t
n
) oxp(t
n
t
n
)
_
_
,
r =
_
_
r(t
0
)
r(t
l
)
.
.
.
r(t
n
)
_
_
,
7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS 199
j =
_
_
j (t
0
)
j (t
l
)
.
.
.
j (t
n
)
_
_
.
Observamos que la correspondiente matriz no es simtrica. Esto conduce a la
ecuacin discretizada de Tjonov cr
o,o
2
r
o,o
= j
o
. Aqu, j
o
=
_
j
o
I
_
R
nl
es una perturbacin (uniformemente distribuido al vector escogido al azar) del lado
derecho discreto j
I
= oxp
_
I
n
_
tal que
j j
o
2
=:
_
1
: 1
n
I=0
_
j
I
j
o
I
_
2
_ c.
Los resultados promedio de 10 iteraciones estn dados en los siguientes cuadros,
donde hemos listado las normas discretas
1 r
o,o
2
de los errores entre la solucin
r(t) = 1 y la aproximacin de Tjonov r
o,o
.
c : = 8 : = 16
10
l
2,4 10
l
2,8 10
l
10
2
7,2 10
2
6,8 10
2
10
3
2,6 10
2
2,4 10
2
10
d
1,8 10
2
1,2 10
2
10
5
2,6 10
3
2,8 10
3
10
6
0,8 10
d
8,7 10
d
10
7
8, 10
d
4,4 10
d
10
S
1,8 10
3
8,2 10
5
10
9
1,6 10
3
0,8 10
5
10
l0
8,0 10
3
2,1 10
d
Cuadro 2. Regularizacin de Tjonov para o=0.
c c = 0,0001 c = 0,001 c = 0,01 c = 0,1
10
l
0,2817 0,2817 0,2810 0,217
10
2
0,0681 0,0676 0,0762 0,1276
10
3
0,0280 0,0286 0,0276 0,182
10
d
0,0120 0,0188 0,1820 1,006
10
5
0,0040 0,0000 0,1481 0,8708
10
6
0,0047 0,02 0,860 ,0764
10
7
0,0041 0,246 2,1818 11,0
10
S
0,0448 0,600 2,4124
10
9
0,1116 0,0080 20,710
10
l0
0,1474 7,620
Cuadro 3. Regularizacin de Tjonov para o,0.
En el cuadro 2, hemos seleccionado c = 0, es decir, slo el error de discretizacin
por la regla de Simpson es responsable del incremento del error para el pequeo
200 7. TEORA DE LOS PROBLEMAS INVERSOS Y MAL PUESTOS
c. Esta diferencia entre parmetros de discretizacin : = 8 y : = 16 son notables
para c _ 10
S
. En el cuadro 3, siempre tomamos : = 16 y observamos primero
que el error decrece con c a un valor ptimo y luego incrementa nuevamente. Esto
es predecido por la teora, en particular por las estimaciones ( ) y ( ).
En el siguiente cuadro, organizamos los resultados correspondientes a los pasos
para el mtodo de Landweber con parmetro a = 0, y nuevamente : = 16.
: c = 0,0001 c = 0,001 c = 0,01 c = 0,1
1 0,8440 0,8480 0,8480 0,881
2 0,6268 0,6268 0,6268 0,620
8 0,680 0,628 0,610 0,478
4 0,4884 0,4884 0,4882 0,4271
0,4161 0,410 0,4147 0,807
6 0,8410 0,8418 0,8411 0,8260
7 0,8421 0,8410 0,8404 0,818
8 0,8004 0,8002 0,2000 0,2761
0 0,8087 0,808 0,8017 0,2704
10 0,2704 0,2702 0,277 0,2467
100 0,00 0,040 0,0488 0,1284
200 0,0281 0,0276 0,0814 0,180
800 0,0276 0,027 0,0880 0,1876
400 0,027 0,0260 0,088 0,1808
00 0,0278 0,0266 0,086 0,1018
Cuadro d. Iteracin de Landweber.
Observamos que el error decae rpidamente en los primeros pasos y luego baja
lentamente. Al comparar el mtodo de Tjonov y Landweber, notamos que el error
correspondiente a la iteracin nmero : debe ser comparada con el error correspon-
diente a c =
l
2n
(ver las estimaciones en las pruebas de los teoremas ( ) y ( ).
Teniendo en cuenta esto, observamos que ambos mtodos son comparables donde la
precisin es concerniente. Notamos, sin embargo, que el tiempo de computacin del
mtodo de Landweber es considerablemente mayor que en el mtodo de Tjonov,
en particular si el error c es pequeo. Por otro lado, el mtodo de Landweber es
estable con respecto a perturbaciones del lado derecho y da muy buenos resultados
an para errores c muy grandes.
Bibliografa
[1] Anger G. Inverse Problems in Dierential Equations. Akademie-Verlag Berlin 1990. Plenum
Press.
[2] The art of modeling in Science and Engieneering. Diran Basmadjian. Chapman & Hall/CRC
[3] Evgrafov M. A. Analytic Functions[in russian].Nauka 1968. Moscow.
[4] L.Ladyzhenskaya, V. A. Solonnikov, N.N Uraltseva. Ecuaciones lineales y Cuasilineales de
tipo parabolico. Trans.Math. Monographs, 23 American Mathematical Society Providence, RI
1968.
[5] Nieves A, Dominguez F. Mtodos Numricos. Aplicados a la ingeniera. .Comp. Ed. Continen-
tal, s.A de C.V 1995. Mxico
[6] SIMMONS George F. Ecuaciones diferenciales con aplicaciones y nota historica. Mc Graw Hill,
1997.Mxico, segunda edicin
[7] Smirnov M.M .problemas de Ecuaciones de la Fsica Matemtica .Nauka 1976. Moscow.
[8] A. N. Tijonov and A. A. Samarsky. Ecuaciones de la fsica Matemtica. M. Editorial Mir
Nauka. 1974.
[9] Webster A. G. Partial Dierential Equation of Mathematical Physics .ed Nueva York; Hafner.
201
APNDICE A
El primer Anexo
%Programa de Ecuaciones Diferenciales Parciales
%Borrado variables y de la pantalla de salida
clear
clc
%Variables de entrada del usuario
n=input(Introduzca el valor de Nn N=);
m=input(Introduzca el valor de Mn M=);
tao=input(Introduzca el valor de Taon Tao=);
h=input(Introduzca el valor de hn h=);
a_cuad=input(Introduzca el valor de a^2n a^2=);
g=input(Introduzca el valor de g(x)n g(x)=);
beta=input(Introduzca el valor de beta(x)n beta(x)=);
f=input(Introduzca el valor de f(x,t)n f(x,t)=);
%Matriz A que se llena con los valores de h, tao y la variable a^2
w=zeros(n+1,m+1);
j=1;
for i=1:n+1
if(i==1)
w(i,j)=2*(1-(a_cuad*tao^2)/h^2);
203
204 A. EL PRIMER ANEXO
w(i,j+1)=(a_cuad*tao^2)/h^2;
j=j+1;
else
if(i==n+1)
w(i,j-1)=(a_cuad*tao^2)/h^2;
w(i,j)=2*(1-(a_cuad*tao^2)/h^2);
j=j+1;
else
w(i,j-1)=(a_cuad*tao^2)/h^2;
w(i,j)=2*(1-(a_cuad*tao^2)/h^2);
w(i,j+1)=(a_cuad*tao^2)/h^2;
j=j+1;
end
end
end
%Matriz w que se llena con los valores de las funciones g(x), beta(x) y f(x)
%Se trabajo la variable w como una matriz de n*m y con la cual se dispuso a
ingresar las condiciones de contorno
%Funcion g(x) y beta(x) con posibles valores de x
W=zeros(n+1,m+1);
syms x;
for i=1:n+1
x=i;
G(i)=eval(g);
BETA(i)=eval(beta);
end
for i=1:n+1
for j=1:m+1
W(i,1)=G(i);
W(i,2)=2*BETA(i)+G(i);
W(1,j)=0;
W(n+1,j)=0;
A. EL PRIMER ANEXO 205
end
end
%Funcion f(x,t) con posibles valores de x y t
syms x t;
for i=1:n+1
for j=1:m+1
x=i;
t=j;
F(i,j)=eval(f);
end
end
%vector F
for j=1:m+1
for i=1:n+1
B(j,i)=((a_cuad*tao^2)/h^2)*W(i,2)-W(i,1)+tao^2*F(i,j);
end
end
WRES=w/B(1,:);
B=B;
Wnal=w*WRES+B(:,1);
%Wnal es la variables W^(j+1)=AW^j+F^j
%Esta matriz indica que cada la corresponde al valor de j
for i=1:n
Wnal(:,i+1)=w*Wnal(:,i)+B(:,i);
end
Wnal
%Graca de la funcion W respecto a x y t
x=[1:n+1];
t=[1:m+1];
gure(1);
plot(x,Wnal,-)
xlabel(eje x);
206 A. EL PRIMER ANEXO
ylabel(eje w);
grid;
legend(Valores de W...);
title(Graca de W(x));
gure(2);
plot(t,Wnal,-)
xlabel(eje t);
ylabel(eje w);
grid;
legend(Valores de W...);
title(Graca de W(t));
______________________
.
Consideremos un cuerpo formado por cierto material que ocupa un dominio
acotado en tres dimensiones, cuyo interior es Gamma y cuya frontera es Tao, tal
como se ilustra en la gura
1. Entendemos el calor como una forma de energa asociada a la agitacin tr-
mica de las moleculas del material. Nuestro objetivo es describir matemticamente
el proceso por el que el calir se distribuye espacialmente en Gamma y evoluciona
a lo largo del tiempo. Concretamente, a partir de leyes fsicas, vamos a obtener
una ecuacin en derivadas parciales. Para ello, durante un intervalo arbitrario de
tiempo [t
l
, t
2
[, estudiaremos un elemento arbitrario en Gamma con volumen \ y
supercie exterior o y cuyos puntos se representan por las coordenadas (r, j, .).
En este elemento suponemos que el calor es protagonista de tres procesos:
produccin, almacenamiento y transporte.
gura 1
Estos procesos estn ligados entre s por el siguiente principio de conservacin:
Q1 = QQT (1)
donde
A. EL PRIMER ANEXO 207
Q1 = Calor producido en \ en [t
l
, t
2
[
Q = Calor almacenado en \ en [t
l
, t
2
[
QT = Calor transportado a travs de o en [t
l
, t
2
[
Representando matemticamente cada uno de estos procesos, la ecuacin (1)
nos llevar a una ecuacin en derivadas parciales, como veremos a continuacin.
Produccin de calor: Suponemos la existencia de una funcin )(r, j, ., t) que
representa el calor neto producido por unidad de volumen y unidad de tiempo. S
) 0 se tiene un aumento de calor (produccin propiamente dicha); ) < 0 signica
disipacin de calor. La integral
_
u
)(r, j, ., t)drdjd. describe el calor producido
por unidad de tiempo en el instante t en el volumen \ mientras que
|2
_
|1
)(r, j, ., t)dt
da cuenta del calor producido en un punto (r, j, .) por unidad de volumen en el
intervalo [t
l
, t
2
[. Consecuentemente, el calor total producido en el volumen \ en
[t
l
, t
2
[ viene dado por:
Q1 =
|2
_
|1
_
u
)(r, j, ., t)drdjd.dt (2)
Almacenamiento de calor: Sea c(r; j; .; t) una funcin que representa la
densidad de calor instantnea en cada punto, es decir la cantidad de calor por
unidad de volumen. La capacidad de almacenamiento est ligada a la posibilidad
de variar esta densidad a lo largo del tiempo, de manera que el calor almacenado
en \ en el intervalo [t
l
, t
2
[ se expresa en la forma:
Q =
_
u
[c(r, j, ., t
2
) c(r, j, ., t
l
)[ drdjd. =
|2
_
|1
_
u
Jt
J|
(r, j, ., t)drdjd.dt (8)
Transporte de calor: El transporte supone un ujo en alguna direccin. Para
cuanticarlo se introduce el denominado vector de ujo 1 que es el campo vectorial
cuyas componentes en la base cartesiana i, ,, / son
1(r, j, ., t) = 1
l
(r, j, ., t)i 1
2
(r, j, ., t), 1
3
(r, j, ., t)/ (4)
Su modulo [1[ =
_
1
2
l
1
2
2
1
2
3
representa la cantidad de calor que se trans-
porta por unidad de rea y de tiempo. Para expresar la cantidad de calor que
atraviesa la supercie o, consideremos en cualquiera de sus puntos (r, j, .), una
base de vectores unitarios formada por el vector : en la direccin normal y los vec-
tores t
l
, t
2
en el plano tangente a o, tal como se ilustra en la gura 2. Por convenio
208 A. EL PRIMER ANEXO
suele darse sentido positivo a : hacia el esterior de la supercie. Con ello el ujo
en cualquier punto de o puede descomponerse en la forma:
1 = c: ,
l
t
l
,
2
t
2
.
Dado que ,
l
t
l
,
2
t
2
es un vector sobre el plano tangente, la componente
c =< 1, : en la direccin normal representa la cantidad de calor por unidad de
rea y de tiempo que sale por cada punto a trves de la supercie o. Por tanto la
cantidad de calor que atraviesa la supercie o en [t
l
, t
2
[ es
Q
T
=
|2
_
|1
_
s
< 1, : d:dt =
|2
_
|1
_
s
di1drdjd.dt ()
Donde se ha utilizado el teorema de la divergencia.
gura 2
Con ello la ecuacin de conservacin (1) puede escribirse en la forma
|2
_
|1
_
s
_
)
Jt
J|
di1
drdjd.dt = 0
Aqu \ representa un volumen arbitrario en \(Gamma) y [t
l
, t
2
[ es asimismo
arbitrario. Por tanto, en virtud del teorema de la anulacin, el integrando ha de ser
nulo (suponiendo que es continuo) en todos los puntos de \ y en cualquier instante
t > t
0
, siendo t
0
un instante inicial dado.
Por tanto podemos escribir
Jt
J|
(r, j, ., t)di1(r, j, ., t) = )(r, j, ., t), \(r, j, .) \, \t > 0 (6)
siendo t
0
cierto instante inicial.
Esta expresin es una ecuacin en derivadas parciales, pero en ella aparecen
dos funciones desconocidas c y 1. Para que la ecuacin tenga utilidad practica es
necesaario reducir las dos incgnitas a una sola. Esto requiere profundizar mas en
la modelacin de los procesos de almacenamiento y de transporte. En ello juega
papel esencial la temperatura.
A. EL PRIMER ANEXO 209
Calor almacenado y temperatura: Estudios experimentales han llevado a
aceptar que la cantidad de calor almacenada depende del tipo de material, de la
distribucin de su masa y se ajusta con suciente bondad a la siguiente expresin:
c(r, j, ., t) = j(r, j, ., t)c(r, j, ., t)n(r, j, ., t) (7)
donde j 0 es la densidad (masa por unidad de volumen), c 0 es el calor
especico, qu reeja la capacidad del material para acumular calor, y n es la temper-
atura. Consideremos que j y c no dependen de t, lo que supone que las propiedades
del material no se alteran con el proceso a lo largo del tiempo. En tal caso, el alma-
cenamiento de calor es directamente proporcional a la variacin de la temperatura,
es decir
Jt
J|
(r, j, ., t) = j(r, j, ., )c(r, j, .)
Ju
J|
(r, j, ., t) (8)
Transporte de calor(conduccin) y temperatura: Como se ha menciona-
do anteriormente, el calor est asociado a la energa del movimiento molecular. Con
esta ptica, el transporte del calor puede verse como una transferencia de energa
entre molculas. Existen dos mecanismos fundamentales para esta transferencia:
conduccin, en que el calor se transere por el contacto entre molculas vecinas y
por conveccin, en que el calor se transprota por el movimiento de las molculas
desde una regin a otra.
Aqu vamos a considerar el transporte por conduccin. Este proceso est de-
scrito por la ley de Fourier, que relaciona el vector de ujo con la temperatura en
la forma
1(r, j, ., t) = 1(r, j, .)\n(r, j, ., t) (0)
donde 1 es la matriz de conductividad trmica, simtrica y con coecientes
/
I
(r, j, .) > 0, y \n = (n
r
, n
, n
:
)
T
es el vector gradiente de temperatura.
Ms explcitamente podemos escribir
1 = 1\n =
_
_
/
ll
n
r
/
l2
n
/
l3
n
:
/
l2
n
r
/
22
n
/
23
n
:
/
l3
n
r
/
23
n
/
33
n
:
_
_
(10)
210 A. EL PRIMER ANEXO
Los coecientes /
I
dan cuenta de la facilidad del material para conducir el caloe
en las tres dimensiones del espacio proporcionalmente a las variaciones de temper-
atura n
r
, n
, n
:
. El signo negativo indica que el sentido del transporte siempre
viene dado por un ujo hacia puntos de menor temperatura.
Las expresiones (8) y (0) son dos ecuaciones constitutivas que nos han permitido
expresar dos parmetros caracteristicos del material, como son el calor especic c,
la densidad j y la conductividad trmica 1. De esta forma la ecuacin (6) queda
con la temperatura como nica funcin incognita en la forma
j(r, j, .)c(r, j, .)n
|
(r, j, ., t)di [1(r, j, .)\n(r, j, ., t)[ = )(r, j, ., t) (11)
Esta es la llamada ecuacin del calor.
Aplicando el operador divergencia al vector (10) la ecuacin (11) puede expli-
carse en la forma
) = jcn
|
[(/
ll
)
r
(/
l2
)
(/
l3
)
:
[ n
r
[(/
l2
)
r
(/
22
)
(/
23
)
:
[ n
[(/
l3
)
r
(/
23
)
(/
33
)
:
[ n
:
[/
ll
n
rr
/
22
n
/
33
n
::
2/
l2
n
r
2/
l3
n
r:
2/
23
n
:
[ (12)
donde hemos supuesto que n tiene derivadas segundas continuas para igualar
las derivadas cruzadas en virtud del Teorema de Schwartz. Claramente, tenemos
una ecuacin diferencial en derivadas parciales lineal, de segundo orden y con sus
coecientes j, c, /
I
y sus derivadas, que en general dependen de cada punto (r, j, .).
Introduciendo ciertas hiptesis, pueden obtenerse formas simplicadas de la
ecuacin (12).
Por ejemplo, si el material es homogneo, sus parmetros j, c, / son iguales en
todo el dominio y la ecuacin (12) se reduce a la siguiente forma con coefeicientes
constantes:
jcn
|
[/
ll
n
rr
/
22
n
/
33
n
::
2/
l2
n
r
2/
l3
n
r:
2/
23
n
:
[ = ) (18)
Suponiendo que la matriz de conductividad trmica sea diagonal, la ecuacin
(12) queda en la forma
jcn
|
[(/
ll
)
r
n
r
(/
22
)
(/
33
)
:
n
:
[[/
ll
n
rr
/
22
n
/
33
n
::
[ = ) (14)
A. EL PRIMER ANEXO 211
El carcter general diagonal corresponde a suponer que la conductividad tiene
los ejes r, j, . como direcciones privilegiadas, en el sentido de que el ujo en la
direccin r depende nicamente de la variacin de la temperatura en esta direccin
(nr) y lo mismo ocurre en las otras dos direcciones.
Si el material es istropo, la conductividad es la misma en las tres direcciones
y se caracteriza por una funcin escalar /. As 1(r, j, .) = /(r, j, .)1 donde 1 es
la matriz identidad, y la ecuacin toma la forma
jcn
|
[/
r
n
r
/
/
:
n
:
[/ [n
rr
n
n
::
[ = ) (1)
Si el material es istropo y homogeneo, esta ecuacin se reduce a la forma
ms sencilla con coecientes constantes
jcn
|
/\
2
n = ) (r, j, ., t) (16)
Condiciones iniciales y condiciones de contorno(frontera)
La ecuacin (11) nos da una herramienta par describir laevolucin de la tem-
peratura en el interior \ de un cierto dominio durante un intervalo de tiempo. Si
resolvieramos la ecuacin(se deja para ms adelante), obtendramos innitas solu-
ciones, lo cual es inaceptable se se pretende disponer de un modelo que describa
una situacin practica sin ambiguedades. LA ecuacin diferencial ha sido obtenida
a partir de una representacin matamtica de los procesos de produccin, almace-
namiento y conduccin del calor. Estos procesos son internos en el sistema objeto
de estudio , no dependiendo de su interaccin con el medio exterior. Adems no
tienen memoria, en el sentido de que no dependen de la historia temporal que haya
tenido el sistema antes del intervalo en el que queramos estudiar su evolucin. Si se
quiere determinar completamente la distribucin de la temperatura en \ a partir
de un cierto instante inicial, es necesario incorporar a la ecuacin diferencial (11)
dos tipos de condiciones: condiciones iniciales, que imponen un estado conocido
del sistema en un instante inicial t
0
, y condiciones de contorno, que jan ciertas
condiciones en la frontera I del dominio.
Condiciones iniciales
212 A. EL PRIMER ANEXO
La presencia de una derivad temporal de primer orden en la ecuacin (11) hace
necesario especicar la distribucin inicial de la temperatura, es decir
n(r, j, ., t
0
) = q(r, j, .), (r, j, .) \ (17)
donde q es una funcin dada.
Condiciones de contorno
Existen distintas situaciones fsicas que pueden traducirse en condiciones en la
frontera del dominio. Vamos a ver tres casos de los que se presentan habitualmente.
Temperatura prescrita: La situacin ms sencilla consiste en mantener la tem-
peratura de los puntos de la frontera en unos valores dados, lo que puede expresarse
en la forma
n(r, j, ., t
0
) = /(r, j, ., t), (r, j, .) I, t > t
0
(18)
como caso especial puede considerarse una temperatura constante. En partic-
ualar puede ser / = 0, en cuyo caso se dice que la condicin es homognea.
Flujo de calor prescrito:El ujo de calor a trves de un punto de la frontera
en la direccin normal : es, segn la ley de Fourier (0)
< 1, : = < 1\n, :) = < \n, 1: =
Ju
Jn
!
(10)
donde
Ju
Jn
!
es la derivada direccional en la direccin denida por el vector
:/ = 1:. Podemos considerar la existencia de un mecanismo capaz de regular
este ujo en los puntos de la frontera y mantenerlo en unos valores deseados. Esto
puede expresarse en la forma
Ju
Jn
(r, j, ., t) = /
0
(r, j, ., t), (r, j, .) I, t > t
0
(20)
donde /
0
es una funcin dada.
Si se considera el caso de una material istropo con matriz de conductividad
diagonal 1 = /|, la expresin del ujo (10) se modica en la forma
< 1, : = / < \n, :) = /
Ju
Jn
(21)
Considerando / = /
0
,/ la condicin (20) queda ahora en la forma
Ju
Jn
(r, j, ., t) = /(r, j, ., t), (r, j, .) I, t > t
0
(22)
A. EL PRIMER ANEXO 213
En particular los casos /
0
= 0 y / = 0 signican que no hay ujo a travs del
contorno, por lo que el dominio est aislado trmicamente (condicin de contorno
homognea).
Intercambio de calor con el medio
The appendix fragment is used only once. Subsequent appendices can be created
using the Chapter Section/Body Tag.
Vous aimerez peut-être aussi
- Las Leyes de La Termodinamica. Produccion IndustrialDocument11 pagesLas Leyes de La Termodinamica. Produccion IndustrialAura MPPas encore d'évaluation
- Taller 4Document8 pagesTaller 4Cheylibeth Ochoa88% (8)
- Climatizacion 18 InstClimatizacionAgua 3 2Document100 pagesClimatizacion 18 InstClimatizacionAgua 3 2Julián Passardi DonosoPas encore d'évaluation
- Entalpía, Entropía y Energía Libre de GibbsDocument14 pagesEntalpía, Entropía y Energía Libre de GibbsANGIE DAYANA BARBOSA CORDOBAPas encore d'évaluation
- Estudio de La Formacion Del Ion Complejo Monotiocianato Ferrico Por EspectrofotometriaDocument15 pagesEstudio de La Formacion Del Ion Complejo Monotiocianato Ferrico Por Espectrofotometriamaco guzman100% (1)
- Etc-60 220v SpanishDocument10 pagesEtc-60 220v Spanishkunam00100% (1)
- Resolución Mezclas BinariasDocument9 pagesResolución Mezclas BinariasAgustin BrunoPas encore d'évaluation
- Deber 4Document4 pagesDeber 4Myrian SantosPas encore d'évaluation
- Labo 5 TermotecDocument10 pagesLabo 5 TermotecIriarte Lazarte Lucas MateoPas encore d'évaluation
- Cenam TemperaturaDocument21 pagesCenam TemperaturaJose Luis NunezPas encore d'évaluation
- Clase 3 - VentilacionDocument23 pagesClase 3 - VentilacionPaul Kevin Bautista PalaciosPas encore d'évaluation
- EXAMEN FINAL TransferenciaDocument4 pagesEXAMEN FINAL TransferenciaCristian Najar OcharanPas encore d'évaluation
- c13 CalorimDocument6 pagesc13 CalorimJoaquín SabásPas encore d'évaluation
- Actividad 2Document4 pagesActividad 2Aylin RendonPas encore d'évaluation
- Segunda Ley de La TermódinamicaDocument20 pagesSegunda Ley de La TermódinamicadarwinPas encore d'évaluation
- Sistema de RefrigeraciónDocument18 pagesSistema de RefrigeraciónAMAO ASENCIOS JACKELINE NICOLLPas encore d'évaluation
- Problemas Mecánica de Fluidos RepasoDocument4 pagesProblemas Mecánica de Fluidos RepasoandresPas encore d'évaluation
- Guía #1 de Aprendizaje Física 8°-Periodo IIIDocument9 pagesGuía #1 de Aprendizaje Física 8°-Periodo IIISofia Parra CastilloPas encore d'évaluation
- 6 Difusion en SolidosDocument28 pages6 Difusion en SolidosCamila Ordenez OlivaresPas encore d'évaluation
- 01 Ejercicios 1-50 ResueltosDocument82 pages01 Ejercicios 1-50 ResueltosasfsagfsdgPas encore d'évaluation
- Trabajo de InvestigaciónDocument8 pagesTrabajo de InvestigaciónAlejandro Gail MoraPas encore d'évaluation
- Lab. Opus.1 NectarDocument21 pagesLab. Opus.1 NectarFernandoMorenoGzPas encore d'évaluation
- Ejercicios EntalpiaDocument2 pagesEjercicios Entalpiarustika JalapaPas encore d'évaluation
- Leyes de Los GasesDocument3 pagesLeyes de Los GasesNicolas GonzalezPas encore d'évaluation
- Ejercicios CORREJIDOS lUIS CARRERADocument14 pagesEjercicios CORREJIDOS lUIS CARRERADaniel Jose Ortiz LopezPas encore d'évaluation
- III. Propiedades de Los FluidosDocument24 pagesIII. Propiedades de Los FluidoslunahurtadoPas encore d'évaluation
- Clase Practica de PsicometriaDocument4 pagesClase Practica de PsicometriaVictor GarciaPas encore d'évaluation
- Sesion 5 - 1° LEY TERMODINÁMICA 2022-2 - Lleno - OkDocument31 pagesSesion 5 - 1° LEY TERMODINÁMICA 2022-2 - Lleno - Okルイス・ エンリケPas encore d'évaluation
- Formulario de QuimicaDocument3 pagesFormulario de QuimicaAnthony JácomePas encore d'évaluation
- Ejercicios Del Metodo GeneralDocument16 pagesEjercicios Del Metodo GeneralRonald Marcelo DiazPas encore d'évaluation