Vous aimerez peut-être aussi
- Cours Physique3 VibrationDocument60 pagesCours Physique3 VibrationYoucef SI100% (3)
- Exercices d'intégrales de lignes, de surfaces et de volumesD'EverandExercices d'intégrales de lignes, de surfaces et de volumesPas encore d'évaluation
- TD2 Electromagnetisme 2021Document2 pagesTD2 Electromagnetisme 2021Lacina BakayokoPas encore d'évaluation
- 10.1 Asservissement Slci Reponse Temporelle 2Document15 pages10.1 Asservissement Slci Reponse Temporelle 2Yahya ElamraniPas encore d'évaluation
- SuitesDocument4 pagesSuitesAb Imo Pectore EvanPas encore d'évaluation
- 20 Cours - Correction Des SLCIDocument15 pages20 Cours - Correction Des SLCISilouane HubertPas encore d'évaluation
- TD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationDocument6 pagesTD 20 - Loi Entrée-Sortie À L'aide D'un Produit Scalaire Constant de Deux Vecteurs D'orientationibrahim rabbajPas encore d'évaluation
- Chapitre 2Document7 pagesChapitre 2Hafa ApbPas encore d'évaluation
- PSI C2 Chap4 TD4V2 PDFDocument10 pagesPSI C2 Chap4 TD4V2 PDFElkettany mohamedPas encore d'évaluation
- (TDM) (FO) Formulaire Theorie Des MecanismesDocument2 pages(TDM) (FO) Formulaire Theorie Des MecanismesSimoMonkadPas encore d'évaluation
- FreDocument347 pagesFreAymen HssainiPas encore d'évaluation
- 2-Electromagnetisme S3 PDFDocument9 pages2-Electromagnetisme S3 PDFHenAbdoPas encore d'évaluation
- Serie D'exercices Corrigés - Math - Suites Réelles 1 - 4ème Math (2009-2010)Document4 pagesSerie D'exercices Corrigés - Math - Suites Réelles 1 - 4ème Math (2009-2010)GastØn El GassPas encore d'évaluation
- Theorie Des Mecanismes PDFDocument9 pagesTheorie Des Mecanismes PDFSafiya TouilPas encore d'évaluation
- tp5 Résolution Des Systèmes D'équations LinéairesDocument4 pagestp5 Résolution Des Systèmes D'équations LinéairesAbid Houssem EddinePas encore d'évaluation
- Cours 2 Les Systèmes Mécaniques OscillantsDocument121 pagesCours 2 Les Systèmes Mécaniques OscillantsMorgan merdaPas encore d'évaluation
- Fic 00010Document12 pagesFic 00010abdelkhalek_94Pas encore d'évaluation
- CI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviDocument4 pagesCI05 TD13 Corrigé - Déterminer Le Modèle de Connaissance D - Un Système AsserviKhaled JberiPas encore d'évaluation
- ResumeThermodynamique 4Document2 pagesResumeThermodynamique 4anas100% (1)
- Devoir de Contrôle N°1 - Sciences Physiques - Bac Sciences Exp (2011-2012) MR Fkih Jamel PDFDocument3 pagesDevoir de Contrôle N°1 - Sciences Physiques - Bac Sciences Exp (2011-2012) MR Fkih Jamel PDFMohamed SaidiPas encore d'évaluation
- Cours SLCIDocument38 pagesCours SLCIkamalPas encore d'évaluation
- Principe Fondamental de La StatiqueDocument8 pagesPrincipe Fondamental de La StatiqueFaouzi KoussaPas encore d'évaluation
- TD 17 - Liaisons Équivalentes PDFDocument5 pagesTD 17 - Liaisons Équivalentes PDFAbdelhakPas encore d'évaluation
- Chapitre3-Exercice Cinematique Dynamique Newton PDFDocument8 pagesChapitre3-Exercice Cinematique Dynamique Newton PDFMichauxPas encore d'évaluation
- TD N°2Document4 pagesTD N°2lalaPas encore d'évaluation
- Exercices Nombres RéelsDocument3 pagesExercices Nombres Réelskoloubla533856100% (1)
- Cours (CorSLCI) (CO) Correction - Des - SLCI PDFDocument34 pagesCours (CorSLCI) (CO) Correction - Des - SLCI PDFhaitamPas encore d'évaluation
- PHY121 TD3 CorrigeDocument0 pagePHY121 TD3 CorrigeKhaDija KhaLdiPas encore d'évaluation
- TD 03 - Performances Et Modélisation Des SLCI (Équa. Dif. + Laplace)Document4 pagesTD 03 - Performances Et Modélisation Des SLCI (Équa. Dif. + Laplace)bhs channelPas encore d'évaluation
- Chapitre2 ElecDocument45 pagesChapitre2 ElecYahya KhaïzouranePas encore d'évaluation
- Automatique II 07 PDFDocument4 pagesAutomatique II 07 PDFmiraPas encore d'évaluation
- GELE3132 Ch1Document18 pagesGELE3132 Ch1Faïssolath AchirouPas encore d'évaluation
- Atomix - Physique Chimie - 4eme Année Secondaire - Section Sciences de L'informatiqueDocument354 pagesAtomix - Physique Chimie - 4eme Année Secondaire - Section Sciences de L'informatiqueMarcq Valérie100% (2)
- Corrigé Physique C 2008Document7 pagesCorrigé Physique C 2008mardil2aPas encore d'évaluation
- La Dynamique Du Mouvement Harmonique SimpleDocument8 pagesLa Dynamique Du Mouvement Harmonique Simplecoucou garbiPas encore d'évaluation
- Geometrie Dans L Espace Part 2 Tspe 57rf9f63k8hDocument3 pagesGeometrie Dans L Espace Part 2 Tspe 57rf9f63k8hLea The OnePas encore d'évaluation
- Poly TD L1 Optique SPM 2014-2015 PDFDocument48 pagesPoly TD L1 Optique SPM 2014-2015 PDFAbdelkader Faklani DouPas encore d'évaluation
- Klubprepa Extrait 4747Document2 pagesKlubprepa Extrait 4747Asmaa KasmiPas encore d'évaluation
- 7 Transformation de LaplaceDocument29 pages7 Transformation de LaplaceMateus Lanzi CiolaPas encore d'évaluation
- Rc3a9vision Automatique Des Systc3a8mes Mc3a9caniquesDocument201 pagesRc3a9vision Automatique Des Systc3a8mes Mc3a9caniquesTtabi VeydiPas encore d'évaluation
- Cours - Physique - La Dynamique de Translation - 3ème Informatique (2017-2018) MR Hedfi KhemaisDocument3 pagesCours - Physique - La Dynamique de Translation - 3ème Informatique (2017-2018) MR Hedfi KhemaisHanine HmidaPas encore d'évaluation
- Bipolaire Cours - Impression - MASSONDocument63 pagesBipolaire Cours - Impression - MASSONAnas le RougePas encore d'évaluation
- Atomistique-Liaison Chimique - Pour Les Niveau Bac+1 Et Bac+2Document47 pagesAtomistique-Liaison Chimique - Pour Les Niveau Bac+1 Et Bac+2arabe4ever100% (1)
- Analyse NumeriqueDocument7 pagesAnalyse NumeriqueTahiri MehdiPas encore d'évaluation
- MP Devoir Si N2 LNLM 2021Document9 pagesMP Devoir Si N2 LNLM 2021Daniel Ndong Ondo100% (1)
- Shema D'un Sujet de DiscussionDocument2 pagesShema D'un Sujet de Discussionsony sonyPas encore d'évaluation
- Travaux Pratiques de Stabilité Des Sytéme AsservisDocument12 pagesTravaux Pratiques de Stabilité Des Sytéme AsservisYacine100% (1)
- Eg+9+ +cours+ ++i+) +Reperage+Dans+Un+Pave+DroitDocument3 pagesEg+9+ +cours+ ++i+) +Reperage+Dans+Un+Pave+DroitC. LPas encore d'évaluation
- Cours Spectre Atomique Quantification Energie - 2 PDFDocument9 pagesCours Spectre Atomique Quantification Energie - 2 PDFnawalsaad100% (1)
- TD1 1Document3 pagesTD1 1Hafsa ChadliPas encore d'évaluation
- CI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementDocument7 pagesCI04 TD12 Corrigé - Prévoir Le Comportement D - Un Modèle Quelconque - Identifier Un Modèle de ComportementKhaled JberiPas encore d'évaluation
- TD 5Document4 pagesTD 5Cyril BeuvryPas encore d'évaluation
- Bac 2019 Corrigé Sciences Ingenieur SDocument4 pagesBac 2019 Corrigé Sciences Ingenieur SAnonymous gTF3XOgPas encore d'évaluation
- Exercice ElectromagnetismeDocument1 pageExercice ElectromagnetismeHoaxerisationPas encore d'évaluation
- COURS6 ProbabilitesDocument12 pagesCOURS6 ProbabilitesRaniaBenFatmaPas encore d'évaluation
- TD N°2 Commande Des Systèmes Linéaires Continus M1 CorrigéDocument12 pagesTD N°2 Commande Des Systèmes Linéaires Continus M1 CorrigéMouad ES SoubaaiPas encore d'évaluation
- MASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Document33 pagesMASTER ASE 1ère Année. Unité - Modélisation & Identification - Travaux Pratiques 2009-2010Alex PittPas encore d'évaluation
- Scénario Pédagogique GR Typoligies Dees Assemblages3tDocument2 pagesScénario Pédagogique GR Typoligies Dees Assemblages3tntayoubPas encore d'évaluation
- Me Technique de Fabrication D' Un MoulageDocument7 pagesMe Technique de Fabrication D' Un Moulagentayoub100% (1)
- Répartition Éxceptionnelle de Génie Mécanique 2020-2021Document5 pagesRépartition Éxceptionnelle de Génie Mécanique 2020-2021lou louPas encore d'évaluation
- Maths Cours 8ème AnnéeDocument232 pagesMaths Cours 8ème Annéentayoub100% (1)
- 7b PDFDocument232 pages7b PDFChokri JaballiPas encore d'évaluation
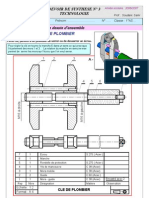
- Devoirdesynthesen3 1as 2006 2007 Cle+de+PlombierDocument5 pagesDevoirdesynthesen3 1as 2006 2007 Cle+de+Plombierntayoub82% (11)
- Ds N°3 1ère AnnéeDocument4 pagesDs N°3 1ère AnnéentayoubPas encore d'évaluation
- Physique Cours 8ème AnnéeDocument159 pagesPhysique Cours 8ème Annéentayoub100% (2)
- Transmission de PuissanceDocument59 pagesTransmission de Puissancentayoub100% (8)
- Formulaire de Mécanique PDFDocument1 pageFormulaire de Mécanique PDFjbcharpePas encore d'évaluation
- Physique Cours 7ème AnnéeDocument192 pagesPhysique Cours 7ème AnnéentayoubPas encore d'évaluation
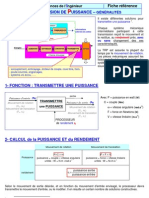
- Transmissiondepuissance CoursDocument2 pagesTransmissiondepuissance CoursntayoubPas encore d'évaluation
- UtamDocument14 pagesUtamntayoub0% (1)
- 2ème InfoDocument112 pages2ème Infontayoub100% (1)
- Fabrication Mecanique Cours PDFDocument89 pagesFabrication Mecanique Cours PDFDeckard Regis Shaw100% (3)
- TorsionDocument12 pagesTorsionntayoubPas encore d'évaluation
- Fabrication MecaniqueDocument39 pagesFabrication MecaniqueLarax123100% (8)
- Transmission de Puissance - GeneralitesDocument10 pagesTransmission de Puissance - Generalitesntayoub75% (4)
- TD Compresseur eDocument8 pagesTD Compresseur entayoub100% (2)
- Translation ProfDocument7 pagesTranslation Profntayoub100% (1)
- Trains EngrenageDocument9 pagesTrains Engrenagefouad80% (5)
- TD Attache eDocument4 pagesTD Attache entayoubPas encore d'évaluation
- TD Etau de Modeliste PRDocument3 pagesTD Etau de Modeliste PRntayoub94% (18)
- TP Analyse Fon Ction NelleDocument21 pagesTP Analyse Fon Ction NellentayoubPas encore d'évaluation
- Tolerances Et AjustementsDocument2 pagesTolerances Et Ajustementsntayoub100% (1)
- TH GuldinDocument1 pageTH GuldinntayoubPas encore d'évaluation
- TD Compresseur PRDocument6 pagesTD Compresseur PRntayoub100% (9)
- TD Sur Les CoupesDocument2 pagesTD Sur Les CoupesntayoubPas encore d'évaluation
- TD Attache PRDocument3 pagesTD Attache PRntayoubPas encore d'évaluation
- FORMULAIRE BA Master 1 StructureDocument5 pagesFORMULAIRE BA Master 1 StructureAbd ElmalikPas encore d'évaluation
- Correction TD 3 MecaniqueDocument7 pagesCorrection TD 3 MecaniqueSimplice AssemienPas encore d'évaluation
- TP Sismique ScribdDocument14 pagesTP Sismique ScribdSoukaina ToumzinePas encore d'évaluation
- NF en 12259-2Document34 pagesNF en 12259-2FATIMA ZAHRA MELKOU100% (1)
- Vibrations 20et 20onde1Document3 pagesVibrations 20et 20onde1YssoufFahSPas encore d'évaluation
- Boite de Vitesses AutomatiqueDocument38 pagesBoite de Vitesses Automatiqueberwolf100% (1)
- RÉSISTANCE DES MATÉRIAUX Par André Bazergui, Thang Bui ...Document10 pagesRÉSISTANCE DES MATÉRIAUX Par André Bazergui, Thang Bui ...Yousef AzzabiPas encore d'évaluation
- Cetim - Fiches Données Pratiques en Soudage.1-122 PDFDocument122 pagesCetim - Fiches Données Pratiques en Soudage.1-122 PDFnooneoveronePas encore d'évaluation
- TP 14 2sc Équilibre D'un Solide Mobile Autour D'un Axe FixeDocument3 pagesTP 14 2sc Équilibre D'un Solide Mobile Autour D'un Axe FixesaanounPas encore d'évaluation
- LubrificationDocument4 pagesLubrificationWilliam Brice NgamenPas encore d'évaluation
- TD N 01oct19Document2 pagesTD N 01oct19leuchimed mouhPas encore d'évaluation
- 18 PSX 23Document138 pages18 PSX 23Ba MamadouPas encore d'évaluation
- 2 CAEA Aerodynamique 2015 PDFDocument5 pages2 CAEA Aerodynamique 2015 PDFFredPas encore d'évaluation
- Remplacement Des Roulements de Roue Avant Sur RD03Document9 pagesRemplacement Des Roulements de Roue Avant Sur RD03Philippe DurixPas encore d'évaluation
- BPEL Exercice-02Document11 pagesBPEL Exercice-02I ZinebPas encore d'évaluation
- 0-Exo GR7 BTSDocument7 pages0-Exo GR7 BTSCamer MedPas encore d'évaluation
- DTU 13.12 Règles Pour Le Calcul Des Fondations Superficielles + Erratum (Novembre 1988)Document22 pagesDTU 13.12 Règles Pour Le Calcul Des Fondations Superficielles + Erratum (Novembre 1988)Nuno Telmo Lopes80% (5)
- MECASYSTEMDocument7 pagesMECASYSTEMJoel Ferraz GoncalvesPas encore d'évaluation
- Chapitre4 PDFDocument31 pagesChapitre4 PDFMohammed NaciriPas encore d'évaluation
- 4.CHAPITRE II LES ASSEMBLAGES COLLéDocument19 pages4.CHAPITRE II LES ASSEMBLAGES COLLéSchmetterling TraurigPas encore d'évaluation
- TP AbsorptionDocument3 pagesTP AbsorptionHasan HusseinPas encore d'évaluation
- Étude Géotechnique 1Document5 pagesÉtude Géotechnique 1Yassin AmiriPas encore d'évaluation
- Chap 6C Barrage en RemblaisDocument50 pagesChap 6C Barrage en RemblaisAzzouzi KamalPas encore d'évaluation
- ParoiDocument2 pagesParoiapi-530069050Pas encore d'évaluation
- Land Rover R380 - Gearbox - Overhaul - Manual FrançaisDocument60 pagesLand Rover R380 - Gearbox - Overhaul - Manual FrançaisYves MunikenPas encore d'évaluation
- Sujets Examens Elasticit 2 PDFDocument13 pagesSujets Examens Elasticit 2 PDFaaerPas encore d'évaluation
- MoteursDocument49 pagesMoteursDriss Zied100% (1)
- PDF Extrait Reservoir DLDocument132 pagesPDF Extrait Reservoir DLSona TrakPas encore d'évaluation
- MOMENT D'inertie PolaireDocument4 pagesMOMENT D'inertie PolaireJeudi VeritéPas encore d'évaluation