Vous aimerez peut-être aussi
- Compilador C CCS y Simulador Proteus para Microcontroladores PICD'EverandCompilador C CCS y Simulador Proteus para Microcontroladores PICÉvaluation : 2.5 sur 5 étoiles2.5/5 (5)
- RodamientosDocument20 pagesRodamientosjose bello100% (12)
- Modelado y simulación de redes. Aplicación de QoS con opnet modelerD'EverandModelado y simulación de redes. Aplicación de QoS con opnet modelerPas encore d'évaluation
- Marketing de Guerrilla - Jay Conrad LevinsonDocument2 pagesMarketing de Guerrilla - Jay Conrad LevinsonRoger Sequeda100% (2)
- Guia Lab 6 y 7 - 2021.2Document12 pagesGuia Lab 6 y 7 - 2021.2Jim Fabián GonzalesPas encore d'évaluation
- Definición y Origen de Los Números ComplejosDocument3 pagesDefinición y Origen de Los Números ComplejosJosé DavidPas encore d'évaluation
- Ejercicios Resueltos Estadística y ProbabilidadDocument26 pagesEjercicios Resueltos Estadística y ProbabilidadFabian Delgado50% (2)
- Cartografia Nautica v2Document134 pagesCartografia Nautica v2Alberto MarquePas encore d'évaluation
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaD'EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaPas encore d'évaluation
- Controladores Industriales 4Document29 pagesControladores Industriales 4sebastian riquelme100% (2)
- Cursocontrol Logix Básico 032007Document145 pagesCursocontrol Logix Básico 032007Ruben Maldonado Bernal100% (1)
- Interrupciones STM32FDocument23 pagesInterrupciones STM32FnuevoNamePas encore d'évaluation
- Laboratorio1 Diagrama Bloques Simulink V2Document8 pagesLaboratorio1 Diagrama Bloques Simulink V2AndresChangoluisaPas encore d'évaluation
- Simulink 14 MayDocument56 pagesSimulink 14 MayCarlos Gustavo Pérez100% (1)
- One Meal at DayDocument3 pagesOne Meal at DaySra R GilPas encore d'évaluation
- Presentacion Modelo Scoring CobranzasDocument30 pagesPresentacion Modelo Scoring Cobranzasismaeltapia100% (4)
- Atp DrawDocument9 pagesAtp DrawDiego Zegarra ValverdePas encore d'évaluation
- Problemas de Carta PsicrométricaDocument3 pagesProblemas de Carta PsicrométricaCamilekz Moreno0% (3)
- Laboratorio n3 (4) Esta Mier Da Se PrendioDocument10 pagesLaboratorio n3 (4) Esta Mier Da Se PrendioJHON JAIRO RAMIREZ MATEUSPas encore d'évaluation
- Sistemas de Control IIIDocument12 pagesSistemas de Control IIIScottie RamseyPas encore d'évaluation
- Modelado de sistemas con Simulink y MATLABDocument12 pagesModelado de sistemas con Simulink y MATLABEdgar ZapanaPas encore d'évaluation
- SISOTOOL-trabajo de SalazarDocument11 pagesSISOTOOL-trabajo de SalazarYhamily SalazarPas encore d'évaluation
- Laboratorio 1 Modelado y SimulacionDocument8 pagesLaboratorio 1 Modelado y SimulacionMireya NacevillaPas encore d'évaluation
- Laboratorio de Sistemas de Control SCILABDocument27 pagesLaboratorio de Sistemas de Control SCILABLuisCarlosRemonCotesPas encore d'évaluation
- Manual SimulinkDocument14 pagesManual SimulinkAlis VillalobosPas encore d'évaluation
- Informe Practica N° 1Document6 pagesInforme Practica N° 1JOSE ELIAS HUARCAYA CAJIALLAPas encore d'évaluation
- Xcos 1Document14 pagesXcos 1lewys rinconPas encore d'évaluation
- Paso 1 Grupo 208055 3Document17 pagesPaso 1 Grupo 208055 3Jose Luis GonzalezPas encore d'évaluation
- Práctica Nro. 02Document9 pagesPráctica Nro. 02Angel TarazonaPas encore d'évaluation
- Capitulo 6. Instrumento VirtualDocument18 pagesCapitulo 6. Instrumento VirtualMichael WilsonPas encore d'évaluation
- Laboratorio 1 Modelado y Simulacion 4278 y 4281Document7 pagesLaboratorio 1 Modelado y Simulacion 4278 y 4281Cesar BautistaPas encore d'évaluation
- Practica 8 Valentina y CarlosDocument10 pagesPractica 8 Valentina y CarlosValentina SilvaPas encore d'évaluation
- P2 MestanzaDocument12 pagesP2 MestanzaEduardo Mestanza RodriguezPas encore d'évaluation
- Simulink TrabajoDocument9 pagesSimulink TrabajoNataly SanmartinPas encore d'évaluation
- P2 CP-CautomaticoDocument9 pagesP2 CP-CautomaticoSebastian CachiguangoPas encore d'évaluation
- Cuantización adaptable de señales de vozDocument8 pagesCuantización adaptable de señales de vozdavidlucas200Pas encore d'évaluation
- Parámetros líneas transmisión LabVIEWDocument13 pagesParámetros líneas transmisión LabVIEWWASHINGTON AMORESPas encore d'évaluation
- Practica 3 SimulinkDocument51 pagesPractica 3 SimulinkGeovanny PesantezPas encore d'évaluation
- 6CV12 Galicia Santillan Alexis Eduardo Práctica3Document20 pages6CV12 Galicia Santillan Alexis Eduardo Práctica3fer bolañosPas encore d'évaluation
- Usando El Kit de Herramientas de LabVIEW Control PID Con El LabVIEW Control Design y El Módulo de SimulaciónDocument10 pagesUsando El Kit de Herramientas de LabVIEW Control PID Con El LabVIEW Control Design y El Módulo de Simulacióncarlos.otiniano9811Pas encore d'évaluation
- Practica Control Design Equipo 10Document13 pagesPractica Control Design Equipo 10Alejandro Carmona VargasPas encore d'évaluation
- Trabajo Autonomo4 Sistemas de ControlDocument5 pagesTrabajo Autonomo4 Sistemas de ControlEzequiel CallePas encore d'évaluation
- S-Functions UNQDocument28 pagesS-Functions UNQClaudio ProbandoPas encore d'évaluation
- Uso de SISOTOOL para Diseño de ControlesDocument35 pagesUso de SISOTOOL para Diseño de ControlesFernando Uzategui GutierrezPas encore d'évaluation
- Informe 5 Isaac SegoviaDocument14 pagesInforme 5 Isaac SegoviaisaacPas encore d'évaluation
- CP Sistemas Microprocesados - P5 - 2020ADocument6 pagesCP Sistemas Microprocesados - P5 - 2020AAngelogc2014Pas encore d'évaluation
- Evalgracia IdentControlSD C11Document4 pagesEvalgracia IdentControlSD C11Erick ZambranoPas encore d'évaluation
- 2-Estruturas LabviewDocument21 pages2-Estruturas LabviewRicardo Quispe PerezPas encore d'évaluation
- Práctica 5 - Identificación de SistemasDocument5 pagesPráctica 5 - Identificación de Sistemashaiter paredesPas encore d'évaluation
- Laboratorio 1Document13 pagesLaboratorio 1ELIAN EDMUNDO ARENAS YATACOPas encore d'évaluation
- p4 Mestanza RodriguezDocument16 pagesp4 Mestanza RodriguezEduardo Mestanza RodriguezPas encore d'évaluation
- Practica #5 PID Lab Sistemas de ControlDocument12 pagesPractica #5 PID Lab Sistemas de ControlWalter MosqueraPas encore d'évaluation
- Laboratorio 3Document8 pagesLaboratorio 3AnibalSanchezPPas encore d'évaluation
- Guía de LaboratorioDocument30 pagesGuía de LaboratorioYilber RoaPas encore d'évaluation
- SimulinkDocument24 pagesSimulinkGabriel Marchena ChávezPas encore d'évaluation
- Lab 4 Sistemas de Control 28092016Document4 pagesLab 4 Sistemas de Control 28092016Jhonny David Iquise OpePas encore d'évaluation
- Practica 3 PDFDocument12 pagesPractica 3 PDFWilliam Avila AguilarPas encore d'évaluation
- Informe BielaDocument5 pagesInforme BielaJulian RodriguezPas encore d'évaluation
- PR Actica 3: Identificaci On de Sistemas-Dise No Del ExperimentoDocument4 pagesPR Actica 3: Identificaci On de Sistemas-Dise No Del ExperimentoErnesto JuradoPas encore d'évaluation
- Laboratorio1 Diagrama Bloques SimulinkDocument9 pagesLaboratorio1 Diagrama Bloques SimulinkMiguel CorreaPas encore d'évaluation
- Metodologia Matlab 04Document12 pagesMetodologia Matlab 04chemavalenciaPas encore d'évaluation
- TMP BuildDocument14 pagesTMP BuildDaniela MarinPas encore d'évaluation
- Laboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Document14 pagesLaboratorio1 Diagrama Bloques Simulink V2 (Realizado1) 2Andres UchoPas encore d'évaluation
- S9 Evaluacion Final Set C Sisct1301Document5 pagesS9 Evaluacion Final Set C Sisct1301jorge Tiznado Tapia0% (1)
- Atp DrawDocument9 pagesAtp DrawDiego Zegarra ValverdePas encore d'évaluation
- TA5Document5 pagesTA5HM FERNANPas encore d'évaluation
- Control de PWM Con LD PDFDocument8 pagesControl de PWM Con LD PDFAndrés Ortega PlazaPas encore d'évaluation
- Control ClasicoDocument13 pagesControl ClasicoFrancisco A. GarciaPas encore d'évaluation
- La Vida Sin CarbohidratosDocument3 pagesLa Vida Sin CarbohidratosSra R Gil100% (1)
- Normas y Codigos de PemexDocument2 pagesNormas y Codigos de PemexSra R GilPas encore d'évaluation
- Hipertrofia MuscularDocument4 pagesHipertrofia MuscularSra R GilPas encore d'évaluation
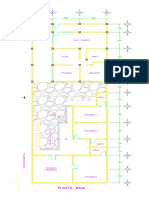
- Planos de CasaDocument1 pagePlanos de CasaSra R GilPas encore d'évaluation
- Calendario Hoja Completa 2016Document1 pageCalendario Hoja Completa 2016Sra R GilPas encore d'évaluation
- Planilla de Inscripcion de AtletasDocument1 pagePlanilla de Inscripcion de AtletasSra R GilPas encore d'évaluation
- Hidrocarburvariactemp PDFDocument1 pageHidrocarburvariactemp PDFSra R GilPas encore d'évaluation
- Materiales Compuestos No MetalicosDocument6 pagesMateriales Compuestos No MetalicosSra R Gil0% (1)
- Yañez Solana Manuel - Los AztecasDocument193 pagesYañez Solana Manuel - Los AztecasYini RiberoPas encore d'évaluation
- Sofia VDocument1 pageSofia VSra R GilPas encore d'évaluation
- Cuantificacion de Materiles PDFDocument19 pagesCuantificacion de Materiles PDFSra R GilPas encore d'évaluation
- Embarazo en La Juventud TempranaDocument14 pagesEmbarazo en La Juventud TempranaSra R GilPas encore d'évaluation
- Mapa Mental: Tipos de Redes IndustrialesDocument2 pagesMapa Mental: Tipos de Redes IndustrialesSra R GilPas encore d'évaluation
- PRACTICASDocument12 pagesPRACTICASSra R GilPas encore d'évaluation
- Carta Meteorologica (Mapa)Document3 pagesCarta Meteorologica (Mapa)Sra R GilPas encore d'évaluation
- TRAMPA EN 3D-Model PDFDocument1 pageTRAMPA EN 3D-Model PDFSra R GilPas encore d'évaluation
- Celular EsDocument2 pagesCelular EsSra R GilPas encore d'évaluation
- Qué Es Un VasoDocument1 pageQué Es Un VasoSra R GilPas encore d'évaluation
- Introduccion A ArduinoDocument24 pagesIntroduccion A Arduinodadar2586Pas encore d'évaluation
- HorasDocument4 pagesHorasSra R GilPas encore d'évaluation
- El MeggerDocument1 pageEl MeggerSra R GilPas encore d'évaluation
- Elaboración de Programas de Mantenimiento A La Maquinaria PeDocument124 pagesElaboración de Programas de Mantenimiento A La Maquinaria PeSra R Gil100% (1)
- Control de MotoresDocument17 pagesControl de MotoresAlejandro Tirado GonzalezPas encore d'évaluation
- Requisitos para Tramitar La Libreta de Mar Tipo D PDFDocument2 pagesRequisitos para Tramitar La Libreta de Mar Tipo D PDFSra R Gil100% (5)
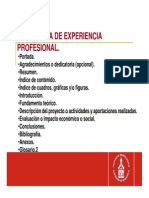
- Titulacion Por MEMORIA DE EXPERIENCIA PROFESIONAL PDFDocument1 pageTitulacion Por MEMORIA DE EXPERIENCIA PROFESIONAL PDFSra R GilPas encore d'évaluation
- Practica 1 Arquitectura ComputadorasDocument3 pagesPractica 1 Arquitectura Computadoraspatoeb69Pas encore d'évaluation
- Cap. 3 Poligonales y Curvas de NivelDocument22 pagesCap. 3 Poligonales y Curvas de NivelDiiRey GonzalezPas encore d'évaluation
- Pasos para Conversiones Entre Sistemas NumericosDocument11 pagesPasos para Conversiones Entre Sistemas NumericosJaime CoronelPas encore d'évaluation
- Ejercicios JavaDocument4 pagesEjercicios JavaMarudsa Muñoz CifuentesPas encore d'évaluation
- Plantilla Plan de PruebasDocument10 pagesPlantilla Plan de PruebasYina VidalPas encore d'évaluation
- HerramientasDocument4 pagesHerramientasMiller Cruz MejiaPas encore d'évaluation
- Curso Flash ManoDocument3 pagesCurso Flash ManoskarwellPas encore d'évaluation
- TELCELDocument22 pagesTELCELFacundo Diaz Estrada0% (1)
- Acta AuditoriaDocument1 pageActa AuditoriaDiana Herrera SuarezPas encore d'évaluation
- Ejercicios para Tarea 1.1 Ecuaciones Lineales y Sus Gráficas.Document7 pagesEjercicios para Tarea 1.1 Ecuaciones Lineales y Sus Gráficas.Yoldania TáboraPas encore d'évaluation
- Brochure Estacion Total Sokkia Set 650 RX Geotop OptDocument3 pagesBrochure Estacion Total Sokkia Set 650 RX Geotop OptBrahyanOlivera50% (2)
- Universidad CatÓlica de CuencaDocument7 pagesUniversidad CatÓlica de CuencaWilson AndradePas encore d'évaluation
- Quiz 1 Semana 3 SEGUNDO BLOQUEESTADISTICA 1 PDFDocument7 pagesQuiz 1 Semana 3 SEGUNDO BLOQUEESTADISTICA 1 PDFjose walteroPas encore d'évaluation
- 00 MatLab CaratulaDocument3 pages00 MatLab CaratuladenisPas encore d'évaluation
- Ejercicios 1 2013 ALGEBRA I Logica MatematicaDocument8 pagesEjercicios 1 2013 ALGEBRA I Logica Matematicajose_5_50_99926336Pas encore d'évaluation
- Solicitudes VariasDocument7 pagesSolicitudes VariasEd QzPas encore d'évaluation
- Pre Parcial Python 2.7Document2 pagesPre Parcial Python 2.7Israel Antonio Rosales LaguanPas encore d'évaluation
- Matriz de ConsistenciaDocument3 pagesMatriz de ConsistenciaJuan Carlos De Los Santos SantosPas encore d'évaluation
- Reporte Practica 1 MICROCONTROLADORESDocument6 pagesReporte Practica 1 MICROCONTROLADORESSergio Garza FloresPas encore d'évaluation
- Esquema Procesos de Selección y ReclutamientoDocument2 pagesEsquema Procesos de Selección y ReclutamientoVanessa Garcia CastilloPas encore d'évaluation
- Comparación flexión vs membrana cúpula esféricaDocument2 pagesComparación flexión vs membrana cúpula esféricaJuanVilcazanPas encore d'évaluation
- Actualizar Xperia Mini ProDocument30 pagesActualizar Xperia Mini ProImelda SánchezPas encore d'évaluation
- Ejemplos de OrganigramasDocument5 pagesEjemplos de OrganigramasJuan Ignacio CapellanoPas encore d'évaluation
- Modelado MultidimensionalDocument11 pagesModelado MultidimensionalHiram WeymanPas encore d'évaluation
- PLANEACION DreamweaverDocument5 pagesPLANEACION DreamweaverAidee SandovalPas encore d'évaluation