Vous aimerez peut-être aussi
- ABCD &hermite Gaussian Beams 2019Document37 pagesABCD &hermite Gaussian Beams 2019Marco ValerdiPas encore d'évaluation
- Mems Sensors For Biomedical ApplicationsDocument28 pagesMems Sensors For Biomedical ApplicationsMuraleetharan BoopathiPas encore d'évaluation
- Capacitance Voltage MeasurementsDocument10 pagesCapacitance Voltage MeasurementsHassaPas encore d'évaluation
- 1 5 11. UltrasonicDocument3 pages1 5 11. UltrasonicPeyang PeyongPas encore d'évaluation
- Thermo Calc Console ExamplesDocument523 pagesThermo Calc Console ExamplesKarthi KeyanPas encore d'évaluation
- Voltalab Catalogue enDocument36 pagesVoltalab Catalogue enOmar EzzatPas encore d'évaluation
- Light FidelityDocument47 pagesLight FidelityMegha KaiwarPas encore d'évaluation
- Model Questions On RF & Microwave Engineering (Paper Code: EC601)Document12 pagesModel Questions On RF & Microwave Engineering (Paper Code: EC601)Dipan JanaPas encore d'évaluation
- Digital Signal Processing FIR Filter Design: Marc Moonen Dept. E.E./ESAT, K.U.LeuvenDocument44 pagesDigital Signal Processing FIR Filter Design: Marc Moonen Dept. E.E./ESAT, K.U.LeuvenHari PillaiPas encore d'évaluation
- Pollaczek-Khinchin Formula For The Queue in Discrete Time With VacationsDocument5 pagesPollaczek-Khinchin Formula For The Queue in Discrete Time With VacationsKarthikeyan RamaswamyPas encore d'évaluation
- Signal and Systems - CLODocument3 pagesSignal and Systems - CLOHamza AyazPas encore d'évaluation
- Chapter 2Document160 pagesChapter 2yohannes lemiPas encore d'évaluation
- Simulation and Optimization of Parameters of CIGS Solar CellDocument23 pagesSimulation and Optimization of Parameters of CIGS Solar CellDeepak BaghelPas encore d'évaluation
- Electron-Phonon Interaction: 7.1. Frohlich HamiltonianDocument2 pagesElectron-Phonon Interaction: 7.1. Frohlich HamiltonianSk Saniur RahamanPas encore d'évaluation
- Space Invader: VHDL: Yuebing Jiang Andrea WrightDocument38 pagesSpace Invader: VHDL: Yuebing Jiang Andrea WrightGafitas MoralesPas encore d'évaluation
- Nanometrical Devices - MOSFET in Synopsys SentaurusDocument15 pagesNanometrical Devices - MOSFET in Synopsys SentaurusJuan VALVERDEPas encore d'évaluation
- Prediction of The CBR Index With The Multi-Gene Genetic Programming MethodDocument7 pagesPrediction of The CBR Index With The Multi-Gene Genetic Programming MethodKing of pump100% (1)
- Solution Du TD N 3Document3 pagesSolution Du TD N 3Manal MaryamPas encore d'évaluation
- BicmosDocument22 pagesBicmosPrashant RamPas encore d'évaluation
- Regression and Classification - Supervised Machine Learning - GeeksforGeeksDocument9 pagesRegression and Classification - Supervised Machine Learning - GeeksforGeeksbsudheertecPas encore d'évaluation
- Reviewing The Basics of Microstrip LinesDocument6 pagesReviewing The Basics of Microstrip LinesMateus LucasPas encore d'évaluation
- ES311 Assignment & Tutorial 6Document7 pagesES311 Assignment & Tutorial 6HemanthSurya0% (1)
- Form Surfaces VolumesDocument1 pageForm Surfaces Volumesعبد القادر نورPas encore d'évaluation
- Programming Assignment 1Document3 pagesProgramming Assignment 1Keshav AwasthiPas encore d'évaluation
- How To Measure Angle With MPU-6050 (GY-521)Document8 pagesHow To Measure Angle With MPU-6050 (GY-521)florigrig100% (2)
- EllipsometryDocument25 pagesEllipsometryViji VijithaPas encore d'évaluation
- Boundary Layer Notes PDFDocument10 pagesBoundary Layer Notes PDFHassanKMPas encore d'évaluation
- Existence and Exponential Decay of Solutions To A Quasilinear Thermoelastic Plate System - Irena LasieckaDocument27 pagesExistence and Exponential Decay of Solutions To A Quasilinear Thermoelastic Plate System - Irena LasieckaJefferson Johannes Roth FilhoPas encore d'évaluation
- Amplitude ModulationDocument14 pagesAmplitude ModulationMuralidhar NakkaPas encore d'évaluation
- 21 Laplace's EquationDocument15 pages21 Laplace's EquationGovanna StarPas encore d'évaluation
- Simplex MethodDocument7 pagesSimplex MethodkalaiPas encore d'évaluation
- Dac 0800 & Dac 0802 (An 1525)Document4 pagesDac 0800 & Dac 0802 (An 1525)HARICH90Pas encore d'évaluation
- Arithmetic CodingDocument12 pagesArithmetic CodingAshley SeesurunPas encore d'évaluation
- MQ2 Data SheetDocument3 pagesMQ2 Data SheetPVPPP100% (2)
- Break-Out Session 2a Delivery Times at Red Dragon RestaurantDocument2 pagesBreak-Out Session 2a Delivery Times at Red Dragon RestaurantEklilEklildzPas encore d'évaluation
- Quantum Lasers: EE 566 Optical CommunicationsDocument26 pagesQuantum Lasers: EE 566 Optical CommunicationsshasiPas encore d'évaluation
- Ions Scattering Spectroscopy (ISS)Document22 pagesIons Scattering Spectroscopy (ISS)faz_smilePas encore d'évaluation
- Digital ModulationDocument48 pagesDigital ModulationMohamed EssamPas encore d'évaluation
- Exercices Transistors Cor PDFDocument5 pagesExercices Transistors Cor PDFAhmed GuetatPas encore d'évaluation
- 6.2 Low Energy Electron Diffraction (LEED)Document9 pages6.2 Low Energy Electron Diffraction (LEED)Shams ShamsPas encore d'évaluation
- Opto & Optical ComDocument222 pagesOpto & Optical ComRansford SackeyPas encore d'évaluation
- Experiment No. (5) Study of Dispersion in Optical Fiber Communication SystemDocument9 pagesExperiment No. (5) Study of Dispersion in Optical Fiber Communication SystemFaez FawwazPas encore d'évaluation
- Pde ToolDocument12 pagesPde ToolAbiola T ObembePas encore d'évaluation
- D18130522 Exercise OneDocument10 pagesD18130522 Exercise OneSsemakula FrankPas encore d'évaluation
- Em Project SquidDocument31 pagesEm Project SquidOng Yern Yee100% (1)
- Assign 2Document1 pageAssign 2Naksh bhatiPas encore d'évaluation
- Airpax Step Motor 12 VOLTSDocument44 pagesAirpax Step Motor 12 VOLTSlucian lunaPas encore d'évaluation
- The Successive Overrelaxation MethodDocument2 pagesThe Successive Overrelaxation MethodShalu OjhaPas encore d'évaluation
- Substrate Integrated Waveguide Microwave Encyclopedia Microwaves101Document5 pagesSubstrate Integrated Waveguide Microwave Encyclopedia Microwaves101Dr-Pritam Singh BakariyaPas encore d'évaluation
- Light Activated AlarmDocument8 pagesLight Activated Alarmpatricia0% (1)
- Searching Techniques in AIDocument37 pagesSearching Techniques in AIJagtar ShergillPas encore d'évaluation
- Module 3 2 GainStabilityDocument6 pagesModule 3 2 GainStabilitywrite2arshad_mPas encore d'évaluation
- ENG-188 Rev5Document38 pagesENG-188 Rev5LuisBritoPas encore d'évaluation
- Time Domain For Second OrderDocument15 pagesTime Domain For Second OrderDharamPas encore d'évaluation
- EE 201 RLC Transient - 1Document27 pagesEE 201 RLC Transient - 1Joichiro NishiPas encore d'évaluation
- Lecture 1003Document4 pagesLecture 1003YocobSamandrewsPas encore d'évaluation
- ESC201 UDas Lec12 Step and Freq Response of RLC PDFDocument7 pagesESC201 UDas Lec12 Step and Freq Response of RLC PDFPk KumarPas encore d'évaluation
- Lecture 13: Natural Frequency and Bode Plot: Lecturer: Dr. Vinita Vasudevan Scribe: Shashank ShekharDocument4 pagesLecture 13: Natural Frequency and Bode Plot: Lecturer: Dr. Vinita Vasudevan Scribe: Shashank ShekharAniruddha RoyPas encore d'évaluation
- Boundary Value ProblemsDocument15 pagesBoundary Value ProblemsShadman Saqlain Rahman, 170021057Pas encore d'évaluation
- Agilent-Vendor Component Libraries High-Frequency Diode LibraryDocument18 pagesAgilent-Vendor Component Libraries High-Frequency Diode LibraryFreeFMPas encore d'évaluation
- Coaxial ResonatorsDocument7 pagesCoaxial ResonatorsFreeFM100% (1)
- R&S - SMDU Helical Resonator SystemDocument3 pagesR&S - SMDU Helical Resonator SystemFreeFM100% (1)
- Francis McSwigganDocument95 pagesFrancis McSwigganFreeFMPas encore d'évaluation
- R.V.R. PTXLCDDocument79 pagesR.V.R. PTXLCDFreeFM100% (3)
- User Manual: Manufacture by ItalyDocument64 pagesUser Manual: Manufacture by ItalyFreeFM67% (6)
- High Frequency VCO Design and SchematicsDocument9 pagesHigh Frequency VCO Design and SchematicsFreeFM100% (5)
- Towards Low Noise OscillatorsDocument3 pagesTowards Low Noise OscillatorsFreeFM100% (1)
- Ec 345Document5 pagesEc 345r_maha5991Pas encore d'évaluation
- FFGQP PDFDocument12 pagesFFGQP PDFKesav RajPas encore d'évaluation
- 3.3V DSP For Digital Motor ControlDocument19 pages3.3V DSP For Digital Motor ControljordileftPas encore d'évaluation
- Signal & System - UNIT - I - MCQDocument18 pagesSignal & System - UNIT - I - MCQMr. AbrarPas encore d'évaluation
- ICA Assignment ECADocument14 pagesICA Assignment ECALAKSHMI NARAYANA ANEMIPas encore d'évaluation
- Parametric Amplification With TransistorsDocument2 pagesParametric Amplification With TransistorsdudulemarcPas encore d'évaluation
- Edc Quiz 2Document2 pagesEdc Quiz 2Tilottama DeorePas encore d'évaluation
- mk5 r32 Fuse BoxDocument7 pagesmk5 r32 Fuse BoxDungani AllanPas encore d'évaluation
- Oscillator CircuitsDocument19 pagesOscillator Circuits21-08523Pas encore d'évaluation
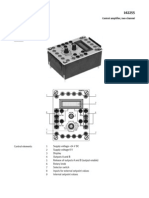
- Amplificador Proporcional FestoDocument6 pagesAmplificador Proporcional Festoal3xffPas encore d'évaluation
- KD Avx20Document64 pagesKD Avx20moom2205Pas encore d'évaluation
- Dual Trace OscilloscopeDocument8 pagesDual Trace OscilloscopeSudip MondalPas encore d'évaluation
- BSC 5 Sem Physics 2015Document4 pagesBSC 5 Sem Physics 2015Mrudula YPas encore d'évaluation
- Control of Temperature System 2Document18 pagesControl of Temperature System 2mustafa Al AsfourPas encore d'évaluation
- UNIT-5 Introduction To SatelliteDocument11 pagesUNIT-5 Introduction To SatelliteDECS STUDENTSPas encore d'évaluation
- A Simple Method Using Microprocessor 8085 Is Suggested For The Measurement of RadiusDocument17 pagesA Simple Method Using Microprocessor 8085 Is Suggested For The Measurement of RadiusVaibhav JainPas encore d'évaluation
- Compact Disc Player: CDP-CE375 CDP-CE275Document32 pagesCompact Disc Player: CDP-CE375 CDP-CE275smallmitaPas encore d'évaluation
- Calibrating A Thermistor CourseworkDocument8 pagesCalibrating A Thermistor Courseworkafjwduenevzdaa100% (2)
- Cerafil App ManualDocument27 pagesCerafil App Manualcbernal73Pas encore d'évaluation
- K Temperature Control Products1110Document38 pagesK Temperature Control Products1110Ixbalamhu CastellanosPas encore d'évaluation
- CheetaDocument144 pagesCheetaArith KrishnanandanPas encore d'évaluation
- DCA25SSIU4F Data SheetDocument4 pagesDCA25SSIU4F Data SheetMatthewPas encore d'évaluation
- Full-Differential Operational Amplifier: Kanazawa University Microelectronics Research Lab. Akio KitagawaDocument51 pagesFull-Differential Operational Amplifier: Kanazawa University Microelectronics Research Lab. Akio KitagawaKulanthaivelu RamaswamyPas encore d'évaluation
- Circuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling PDFDocument618 pagesCircuit Analysis I With Matlab Computing and Simulink Simpower Systems Modeling PDFOscar Iñaky Hernández HernándezPas encore d'évaluation
- Stoddart Radio Company - A HistoryDocument6 pagesStoddart Radio Company - A HistoryDomingo VilàPas encore d'évaluation
- Noise Optimization in Sensor Signal Conditioning Circuit Part IDocument37 pagesNoise Optimization in Sensor Signal Conditioning Circuit Part Iyzhao148Pas encore d'évaluation
- Application Note: Cs5531/32/33/34 Frequently Asked QuestionsDocument14 pagesApplication Note: Cs5531/32/33/34 Frequently Asked Questionssalam87Pas encore d'évaluation
- Dokumen - Tips FM Exc 25w Tech ManualDocument50 pagesDokumen - Tips FM Exc 25w Tech ManualΣφαίρα ΘεσσαλίαςPas encore d'évaluation
- CMOS RF Receiver Design For Wireless Application B RazaviDocument6 pagesCMOS RF Receiver Design For Wireless Application B RazaviHARDIK UPRETIPas encore d'évaluation
- Vacuum Tube Valley Issue 16Document44 pagesVacuum Tube Valley Issue 16samtocieloPas encore d'évaluation