Vous aimerez peut-être aussi
- Medición de atenuación de cables OPGWDocument12 pagesMedición de atenuación de cables OPGWjoaquicPas encore d'évaluation
- Otpt-Carrete-Pruebas-MAATDocument2 pagesOtpt-Carrete-Pruebas-MAATjoaquicPas encore d'évaluation
- 4 - Calculos de Enlace PDFDocument10 pages4 - Calculos de Enlace PDFjoaquicPas encore d'évaluation
- Ficha Tecnica F.O Span 250Document1 pageFicha Tecnica F.O Span 250joaquic100% (1)
- 4 - Calculos de Enlace PDFDocument10 pages4 - Calculos de Enlace PDFjoaquicPas encore d'évaluation
- CursoFO 4 EmpalmesDocument25 pagesCursoFO 4 EmpalmessebascascoPas encore d'évaluation
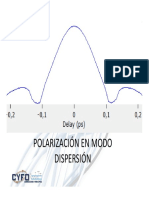
- 6 - PMDDocument10 pages6 - PMDjoaquicPas encore d'évaluation
- Mediciones Antes Del TendidoDocument4 pagesMediciones Antes Del TendidojoaquicPas encore d'évaluation
- 2 - PrincipiosDocument74 pages2 - PrincipiosjoaquicPas encore d'évaluation
- 5 - Mediciones PDFDocument22 pages5 - Mediciones PDFjoaquicPas encore d'évaluation
- Guia Tutorial PDF Power BI PDFDocument26 pagesGuia Tutorial PDF Power BI PDFAlvaro Rodriguez ArteagaPas encore d'évaluation
- Calculo CarretesDocument6 pagesCalculo CarretesjoaquicPas encore d'évaluation
- Instrucctivo EmaplmeDocument1 pageInstrucctivo EmaplmejoaquicPas encore d'évaluation
- Evolución de La Fibra Óptica PDFDocument109 pagesEvolución de La Fibra Óptica PDFjoaquicPas encore d'évaluation
- INSTALACIÓN AMORTIGUADOR ESPIRAL MANUALDocument1 pageINSTALACIÓN AMORTIGUADOR ESPIRAL MANUALjoaquicPas encore d'évaluation
- 1.ins - Mon - Amarre Ret - Drop (Parte 2)Document1 page1.ins - Mon - Amarre Ret - Drop (Parte 2)joaquicPas encore d'évaluation
- MODULO 01 Fibra OpticaDocument85 pagesMODULO 01 Fibra OpticaYenifer Bustamante Puello100% (5)
- GD - FIS - NSC (Sin Resp)Document7 pagesGD - FIS - NSC (Sin Resp)Azrak HantuzPas encore d'évaluation
- MODULO 01 Fibra OpticaDocument85 pagesMODULO 01 Fibra OpticaYenifer Bustamante Puello100% (5)
- Instrucctivo EmaplmeDocument1 pageInstrucctivo EmaplmejoaquicPas encore d'évaluation
- Curso de Fibra Óptica - Capítulo 6-ConectoresDocument37 pagesCurso de Fibra Óptica - Capítulo 6-Conectoresax55Pas encore d'évaluation
- Kit de ReentradaDocument1 pageKit de ReentradajoaquicPas encore d'évaluation
- Desarrollo HumanoDocument5 pagesDesarrollo HumanojoaquicPas encore d'évaluation
- Manual Instalacion Foscb4 Tyco PDFDocument20 pagesManual Instalacion Foscb4 Tyco PDFjoaquicPas encore d'évaluation
- Curso de Fibra Óptica - Capítulo 3-CableadoDocument15 pagesCurso de Fibra Óptica - Capítulo 3-Cableadoax55Pas encore d'évaluation
- Analisis ProcesosDocument10 pagesAnalisis ProcesosjoaquicPas encore d'évaluation
- Todo Sobre Los UPSDocument14 pagesTodo Sobre Los UPSjgutierrezpepePas encore d'évaluation
- Proceso Gestion Organizacionciones Quiz1Document5 pagesProceso Gestion Organizacionciones Quiz1joaquicPas encore d'évaluation
- InstruccitvoDocument10 pagesInstruccitvojoaquicPas encore d'évaluation
- Proceso Gestion Organizacionciones Quiz1Document5 pagesProceso Gestion Organizacionciones Quiz1joaquicPas encore d'évaluation
- Cálculo Vectorial ACF-0904Document24 pagesCálculo Vectorial ACF-0904José AlbertPas encore d'évaluation
- Formato Actividad de Aprendizaje 3Document24 pagesFormato Actividad de Aprendizaje 3Stephania CiprianPas encore d'évaluation
- 2-Estadistica Probabilidades - 1Document37 pages2-Estadistica Probabilidades - 1Comunicacion DatosPas encore d'évaluation
- Ruta de Clase #17 NormalDocument6 pagesRuta de Clase #17 NormalJORDAN STEVEN ARCE ROJASPas encore d'évaluation
- Planeación - Didáctica - Calculo Diferencial - U1 - 2023Document14 pagesPlaneación - Didáctica - Calculo Diferencial - U1 - 2023Isaac Pérez NavarroPas encore d'évaluation
- Práctica Calificada 1-2 - Investigacion Operativa I TelesupDocument8 pagesPráctica Calificada 1-2 - Investigacion Operativa I TelesupAlex Caruajulca Tiglla100% (6)
- AnaliticidadDocument13 pagesAnaliticidadLucas VillagraPas encore d'évaluation
- Trigonometria - 5to Año - IV Bimestre - 2014Document8 pagesTrigonometria - 5to Año - IV Bimestre - 2014Alejandro Hugo Chua GarciaPas encore d'évaluation
- El Teorema de de MoivreDocument8 pagesEl Teorema de de MoivreEliiceoAvilaPas encore d'évaluation
- Caso Practico Unidad 3 Desarrollo PDFDocument3 pagesCaso Practico Unidad 3 Desarrollo PDFKarol PalacioPas encore d'évaluation
- Silabo SistemasDocument12 pagesSilabo Sistemasgvrv-uapPas encore d'évaluation
- 13 Funciones y GráficasDocument12 pages13 Funciones y GráficasLuis de la Vega SacristánPas encore d'évaluation
- Flujo PotencialDocument10 pagesFlujo PotencialJuan Nicolás Alonso AlzatePas encore d'évaluation
- Anexo 1. Plantilla de Presentación Tarea 2Document15 pagesAnexo 1. Plantilla de Presentación Tarea 2Liliana Chará100% (1)
- Universidad Continental Solucionario Final Pa2Document1 pageUniversidad Continental Solucionario Final Pa2AdderlyNinaPas encore d'évaluation
- Ondas ElectromagnéticasDocument84 pagesOndas Electromagnéticasaegonslayer31650% (2)
- (Matemática 9°) Semana 34-35-36 Parte 1Document11 pages(Matemática 9°) Semana 34-35-36 Parte 1Isabella ortiz aguirrePas encore d'évaluation
- Tarea3 422 Carlos Lozano. EDocument11 pagesTarea3 422 Carlos Lozano. EFabian OrtizPas encore d'évaluation
- E Ejercicios Resueltos Analisis Lineal Series de FourierDocument6 pagesE Ejercicios Resueltos Analisis Lineal Series de FourierGeorge Brandon Artuz VillasmilPas encore d'évaluation
- Introduction ToDocument15 pagesIntroduction ToLuisMiguelVillegasSantamaria100% (1)
- Calculo I I - Trabajo Colaborativo PDFDocument16 pagesCalculo I I - Trabajo Colaborativo PDFGeraldin AndreaPas encore d'évaluation
- Operadores Matematicos 2020aDocument5 pagesOperadores Matematicos 2020aDaniel Lovón RodríguezPas encore d'évaluation
- Grupo de MetodosDocument8 pagesGrupo de MetodosPabel J. Canchari ArésteguiPas encore d'évaluation
- Guia de Sucesiones PDFDocument6 pagesGuia de Sucesiones PDFpiperubiolopezPas encore d'évaluation
- Matrices de Rotacion de Robot 2DDocument12 pagesMatrices de Rotacion de Robot 2Djulfo05Pas encore d'évaluation
- Ejercicios Métodos NuméricosDocument8 pagesEjercicios Métodos NuméricosDaniel Bonilla Parra0% (1)
- DERIVACIÓN IMPLÍCITA: TEORÍA Y EJERCICIOSDocument15 pagesDERIVACIÓN IMPLÍCITA: TEORÍA Y EJERCICIOSEduardo FloresPas encore d'évaluation
- Volumenes de RevoluciónDocument2 pagesVolumenes de RevoluciónAntoniio LeegueePas encore d'évaluation
- Laboratorio Calificado-Javier PérezDocument26 pagesLaboratorio Calificado-Javier PérezJavier PérezPas encore d'évaluation
- Factores comunes y trinomios cuadradosDocument11 pagesFactores comunes y trinomios cuadradosAleja IchinaPas encore d'évaluation