Vous aimerez peut-être aussi
- An 1162Document36 pagesAn 1162naniknanikPas encore d'évaluation
- Compensation Method Peak Current Mode Control Buck AN028 enDocument13 pagesCompensation Method Peak Current Mode Control Buck AN028 ensadqazwsxPas encore d'évaluation
- AS3842Document10 pagesAS3842kik020Pas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Pas encore d'évaluation
- RC Phase Shift Oscillator and RC Coupled Ce Amplifier - Lab ExperimentDocument8 pagesRC Phase Shift Oscillator and RC Coupled Ce Amplifier - Lab ExperimentMani BharathiPas encore d'évaluation
- 3.4.2 Output Capacitor: Out C, Max OutDocument14 pages3.4.2 Output Capacitor: Out C, Max OutReza RzPas encore d'évaluation
- Ring OscillatorDocument12 pagesRing OscillatorCmeLiv InmyHart NpaynoRentPas encore d'évaluation
- Design Battery ChargerDocument20 pagesDesign Battery Chargeranand_girgaonkar100% (1)
- Switched Capacitor Band-Pass Filter 0.1 Object: C 3 DB BPDocument16 pagesSwitched Capacitor Band-Pass Filter 0.1 Object: C 3 DB BPmohamedPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Three Bit Phase Shifter: MMIC Project Final Report EE525.787 Fall 2007Document16 pagesThree Bit Phase Shifter: MMIC Project Final Report EE525.787 Fall 2007eesharifPas encore d'évaluation
- An 4134Document14 pagesAn 4134shri.bhairavkar6977Pas encore d'évaluation
- Compensating The RHPZ in A CCM Boost Converter - The Analytical Way - Jun 2009Document4 pagesCompensating The RHPZ in A CCM Boost Converter - The Analytical Way - Jun 2009QuickerManPas encore d'évaluation
- Fly BackDocument20 pagesFly BackĐặng Văn TàiPas encore d'évaluation
- AN943A Practical PICmicro Oscillator Analysis and DesignDocument14 pagesAN943A Practical PICmicro Oscillator Analysis and DesignbagopercyPas encore d'évaluation
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipePas encore d'évaluation
- Power Electronics by D. W. Hart Chapter 07Document25 pagesPower Electronics by D. W. Hart Chapter 07Syed AfzalPas encore d'évaluation
- 12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsDocument6 pages12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsThanos van RamPas encore d'évaluation
- Objective: Design A Practical Integrator Circuit Using Common OP AMP Circuits. TestDocument10 pagesObjective: Design A Practical Integrator Circuit Using Common OP AMP Circuits. TestVinoth KumarPas encore d'évaluation
- Funcionamiento Del 5Q1265RF en La FuenteDocument19 pagesFuncionamiento Del 5Q1265RF en La FuenteJorge Corrales100% (1)
- AND8182Document6 pagesAND8182carlos_eqnPas encore d'évaluation
- Technical Brief 417: Converter ParametersDocument1 pageTechnical Brief 417: Converter ParametersdiegoifgPas encore d'évaluation
- Design and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)Document23 pagesDesign and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)uzair aminPas encore d'évaluation
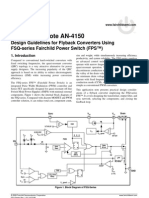
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaPas encore d'évaluation
- An 4137Document20 pagesAn 4137Andres RinconPas encore d'évaluation
- R - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionDocument10 pagesR - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionMiguel BrunoPas encore d'évaluation
- Transformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryDocument4 pagesTransformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryAvinash SharmaPas encore d'évaluation
- Understanding Attenuators and Compensation: R R V R V R R R V VDocument7 pagesUnderstanding Attenuators and Compensation: R R V R V R R R V Vnithinjose4uPas encore d'évaluation
- Implementing The TL431 Feedback LoopDocument10 pagesImplementing The TL431 Feedback LoopAnand KumarPas encore d'évaluation
- VCO Colpits SimulationDocument12 pagesVCO Colpits SimulationAmarok81Pas encore d'évaluation
- AN005-Design and DSP Implementation of 3.3-kW Resonant LLC On-Board ChargerDocument23 pagesAN005-Design and DSP Implementation of 3.3-kW Resonant LLC On-Board ChargerRudhi KurniawanPas encore d'évaluation
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 pagesUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- Dist Cord (R)Document12 pagesDist Cord (R)1453hPas encore d'évaluation
- Dist Relay With CVTDocument26 pagesDist Relay With CVTjaved shaikh chaandPas encore d'évaluation
- 7 - Frequency Response DesignDocument44 pages7 - Frequency Response DesignmisterPas encore d'évaluation
- Band-Pass Filtered, Inverting - 40 DB Attenuator, 10 HZ - 100 KHZ, 0.1 DB ErrorDocument20 pagesBand-Pass Filtered, Inverting - 40 DB Attenuator, 10 HZ - 100 KHZ, 0.1 DB ErrorSalman ZafarPas encore d'évaluation
- Frequency compensation of op-ampsDocument15 pagesFrequency compensation of op-ampsengsysPas encore d'évaluation
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesD'EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesPas encore d'évaluation
- The RC Oscillator CircuitDocument6 pagesThe RC Oscillator CircuitNishanthi BheemanPas encore d'évaluation
- Easychair Preprint: Manthan Mangesh Borage, Dipen M. Vachhani and Rajesh AryaDocument13 pagesEasychair Preprint: Manthan Mangesh Borage, Dipen M. Vachhani and Rajesh AryaAnamPas encore d'évaluation
- Differential Analog Data Path DC Offset Calibration MethodsDocument7 pagesDifferential Analog Data Path DC Offset Calibration MethodsLincoln RibeiroPas encore d'évaluation
- An Optimum PWM Strategy For 5-Level Active NPC (ANPC) Converter Based On Real-Time Solution For THD MinimizationDocument7 pagesAn Optimum PWM Strategy For 5-Level Active NPC (ANPC) Converter Based On Real-Time Solution For THD MinimizationBrittany JohnsonPas encore d'évaluation
- ConferenceDocument31 pagesConferenceDhanu ChettyPas encore d'évaluation
- L.C Oscillator Tutorial: 1 AbstractDocument18 pagesL.C Oscillator Tutorial: 1 AbstractChi PhamPas encore d'évaluation
- Capacimetre FemtoDocument30 pagesCapacimetre FemtoJean-Marie ChaputPas encore d'évaluation
- Oscillators State MachineDocument6 pagesOscillators State MachineDain HanPas encore d'évaluation
- Transformer Design Consideration For Off Line Flyback Converters Using Fairchild Power Switch (FPS™)Document10 pagesTransformer Design Consideration For Off Line Flyback Converters Using Fairchild Power Switch (FPS™)StefanvnvPas encore d'évaluation
- AEC NotesDocument271 pagesAEC Notes1DS19EC726- Pankaj Ashok M.Pas encore d'évaluation
- Design Guideline For Flyback Charger Using FAN302HL/ULDocument20 pagesDesign Guideline For Flyback Charger Using FAN302HL/ULteomondoPas encore d'évaluation
- Very Wide Input Voltage Range-Flyback (90V To 600V AC)Document12 pagesVery Wide Input Voltage Range-Flyback (90V To 600V AC)senkum812002Pas encore d'évaluation
- 1.RC CircuitsDocument7 pages1.RC CircuitsNaveen ChPas encore d'évaluation
- 20116052-Lica Term ProjectDocument12 pages20116052-Lica Term ProjectH052 Rajesh Komaravalli ECEPas encore d'évaluation
- Agilent Eesof Eda: Overview On Designing A Low-Noise Vco On Fr4Document6 pagesAgilent Eesof Eda: Overview On Designing A Low-Noise Vco On Fr4bayman66Pas encore d'évaluation
- Application Note AN6016: LCD Backlight Inverter Drive IC (FAN7311)Document18 pagesApplication Note AN6016: LCD Backlight Inverter Drive IC (FAN7311)Osama YaseenPas encore d'évaluation
- Regulated DC Power Supply Lab AssignmentDocument17 pagesRegulated DC Power Supply Lab AssignmentSebastien Paul100% (1)
- A 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersDocument4 pagesA 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersThanos van RamPas encore d'évaluation
- A General Approach For Optimizing Dynamic Response For Buck ConverterDocument10 pagesA General Approach For Optimizing Dynamic Response For Buck ConverterDiogo RodriguesPas encore d'évaluation
- IC Questions With Ans AnilsirDocument22 pagesIC Questions With Ans AnilsirAniil J Kumaar50% (2)
- Atlasbx Catalog (2014) 1Document12 pagesAtlasbx Catalog (2014) 1Nguyen Thanh TuanPas encore d'évaluation
- Designing A TMS320F280x Based Digitally Controlled DC-DC Switching Power SupplyDocument16 pagesDesigning A TMS320F280x Based Digitally Controlled DC-DC Switching Power SupplyNguyen Thanh TuanPas encore d'évaluation
- A Fast Current-Based MPPT Technique Employing Sliding Mode ControlDocument6 pagesA Fast Current-Based MPPT Technique Employing Sliding Mode ControlNguyen Thanh TuanPas encore d'évaluation
- Application Note ANP 16: Loop Compensation of Voltage-Mode Buck ConvertersDocument9 pagesApplication Note ANP 16: Loop Compensation of Voltage-Mode Buck ConvertersNguyen Thanh TuanPas encore d'évaluation
- Integrated Photovoltaic Maximum Power Point Tracking ConverterDocument5 pagesIntegrated Photovoltaic Maximum Power Point Tracking ConverterAndré Dzis GiacominiPas encore d'évaluation
- TIPD128 CapacitiveLoadDrive CapacitiveLoadDriveSolutionUsingAnIsolationResistor Tidu032cDocument28 pagesTIPD128 CapacitiveLoadDrive CapacitiveLoadDriveSolutionUsingAnIsolationResistor Tidu032cLudovico SilvinoPas encore d'évaluation
- Practice QuestionsDocument2 pagesPractice QuestionsSamiraTJBAPas encore d'évaluation
- Chapter 7 - Bode Plot and Gain Compensation (Part 2)Document18 pagesChapter 7 - Bode Plot and Gain Compensation (Part 2)Thanes WaranPas encore d'évaluation
- Landau RSTDocument11 pagesLandau RSTpbaculimaPas encore d'évaluation
- Improve transient response and noise attenuation with MicroRAMDocument8 pagesImprove transient response and noise attenuation with MicroRAMalexanderPas encore d'évaluation
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghPas encore d'évaluation
- Design of A Telescopic Fully Differential OTADocument7 pagesDesign of A Telescopic Fully Differential OTAUdai ValluruPas encore d'évaluation
- Plecs Tl431Document11 pagesPlecs Tl431khsniper100% (1)
- Control System 2MARKSDocument16 pagesControl System 2MARKSSeekay Alais Karuppaiah CPas encore d'évaluation
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88Pas encore d'évaluation
- Scientech 2323Document80 pagesScientech 2323sarikapravinPas encore d'évaluation
- Design of Fully Differential Operational Amplifier With High Gain, Large Bandwidth and Large Dynamic RangeDocument93 pagesDesign of Fully Differential Operational Amplifier With High Gain, Large Bandwidth and Large Dynamic RangeAhmed EdrisPas encore d'évaluation
- Transient Response Counts When Choosing Phase MarginDocument4 pagesTransient Response Counts When Choosing Phase Marginharis13harisPas encore d'évaluation
- 2.7V To 5.5V Single Supply CMOS Op Amps: FeaturesDocument20 pages2.7V To 5.5V Single Supply CMOS Op Amps: FeaturesDavid ReyesPas encore d'évaluation
- L1AdaptCntrl CSM Oct2011Document52 pagesL1AdaptCntrl CSM Oct2011alexanderkalePas encore d'évaluation
- Chapter - 04Document38 pagesChapter - 04Alfredo Lopez CordovaPas encore d'évaluation
- Lead and Lag Compensators: Systems and Control TheoryDocument53 pagesLead and Lag Compensators: Systems and Control TheoryAppasani ManishankarPas encore d'évaluation
- L420 OpAmpCompIDocument14 pagesL420 OpAmpCompIShreerama Samartha G BhattaPas encore d'évaluation
- A Compensation-Based Optimization Methodology For Gain-Boosted OpampDocument4 pagesA Compensation-Based Optimization Methodology For Gain-Boosted OpampShubham RaiPas encore d'évaluation
- MAX4238-MAX4239 - AmplificadorDocument10 pagesMAX4238-MAX4239 - AmplificadorJeferson FraytagPas encore d'évaluation
- Control System Engineering Time Response and Frequency AnalysisDocument16 pagesControl System Engineering Time Response and Frequency AnalysisrameshsmePas encore d'évaluation
- Aicd Exam SolutionDocument16 pagesAicd Exam SolutionTenzin ChoendenPas encore d'évaluation
- PowerESIM ManualDocument62 pagesPowerESIM ManualCataPas encore d'évaluation
- R2A20111Document41 pagesR2A20111Vidal VelasquezPas encore d'évaluation
- Current Mode Pi ControllerDocument19 pagesCurrent Mode Pi ControllersunitaPas encore d'évaluation
- Bode Plot Stability AnalysisDocument28 pagesBode Plot Stability AnalysisDeepthiPas encore d'évaluation
- Feedback AmplifierDocument52 pagesFeedback AmplifierBharavi K SPas encore d'évaluation
- Assiut University Automatic Control Final Exam QuestionsDocument3 pagesAssiut University Automatic Control Final Exam QuestionsEngAbdallahMohamedPas encore d'évaluation
- Computer Science Textbook Solutions - 30Document31 pagesComputer Science Textbook Solutions - 30acc-expertPas encore d'évaluation
- DC-DC Converters Feedback and ControlDocument220 pagesDC-DC Converters Feedback and ControlNguyên NghĩaPas encore d'évaluation