Vous aimerez peut-être aussi
- Nikolay Kozyrev - Properties of TimesDocument34 pagesNikolay Kozyrev - Properties of TimesAdriano Piantella100% (1)
- Afrocentricity PDFDocument6 pagesAfrocentricity PDFchveloso100% (2)
- Numerical Solutions of The Schrodinger EquationDocument26 pagesNumerical Solutions of The Schrodinger EquationqrrqrbrbrrblbllxPas encore d'évaluation
- Destiny Analysis of Roger FedererDocument4 pagesDestiny Analysis of Roger Federerjerryking685Pas encore d'évaluation
- Theology of PreSocraticsDocument22 pagesTheology of PreSocraticsAccess Journal100% (1)
- Daniel Johnson - Using The Cube The Pickup Artists Secret Weapon Cd2 Id867011035 Size212Document19 pagesDaniel Johnson - Using The Cube The Pickup Artists Secret Weapon Cd2 Id867011035 Size212Nemanja RepićPas encore d'évaluation
- AREVA - Fault AnalysisDocument106 pagesAREVA - Fault AnalysisAboMohamedBassam100% (1)
- Advanced Theta Healing PracticDocument4 pagesAdvanced Theta Healing PracticDragorad Vitoriović50% (2)
- Sweet SMS and TrustDocument2 pagesSweet SMS and TrustChibueze HarrisonPas encore d'évaluation
- Graphing The Sine FunctionDocument4 pagesGraphing The Sine Functionapi-466088903Pas encore d'évaluation
- Electricity and Magnetism II - Jackson Homework 11Document5 pagesElectricity and Magnetism II - Jackson Homework 11Ale GomezPas encore d'évaluation
- Finite Element MethodDocument68 pagesFinite Element Methodpaulohp2100% (1)
- KGSP Interview Faq PDFDocument2 pagesKGSP Interview Faq PDFFatiHayad100% (2)
- Lesson Plan - Bullying 3Document3 pagesLesson Plan - Bullying 3api-438012581Pas encore d'évaluation
- Aif 1605Document38 pagesAif 1605catapdf3Pas encore d'évaluation
- Calculation and Modelling of Radar Performance 4 Fourier TransformsDocument25 pagesCalculation and Modelling of Radar Performance 4 Fourier TransformsmmhoriiPas encore d'évaluation
- A Functional Determinant For The Riemann Xi FunctionDocument12 pagesA Functional Determinant For The Riemann Xi FunctionJose Javier Garcia MoretaPas encore d'évaluation
- 776 Notes - FFT MethodsDocument7 pages776 Notes - FFT Methodsnemamea1Pas encore d'évaluation
- Discrete Fourier Transform: e C T F DT e T F T C C CDocument9 pagesDiscrete Fourier Transform: e C T F DT e T F T C C CZuraidi EpendiPas encore d'évaluation
- Mmpe Smith OriDocument59 pagesMmpe Smith OriKhalif KeningganPas encore d'évaluation
- Cauchy Best of Best Est-P-9Document22 pagesCauchy Best of Best Est-P-9sahlewel weldemichaelPas encore d'évaluation
- Taylor@Notes On Several Complex Variables 1997 PDFDocument183 pagesTaylor@Notes On Several Complex Variables 1997 PDFعليجاسبPas encore d'évaluation
- Biryukov 2002Document5 pagesBiryukov 2002georgeqin75Pas encore d'évaluation
- Second-Order Subdifferential of 1-And - Norm: Konstantin EmichDocument11 pagesSecond-Order Subdifferential of 1-And - Norm: Konstantin EmichhungkgPas encore d'évaluation
- Elastic Inelastic ScatteringDocument30 pagesElastic Inelastic ScatteringIzan PhysicPas encore d'évaluation
- Non Periodic Trigonometric ApproximationDocument16 pagesNon Periodic Trigonometric ApproximationHillel Tal-EzerPas encore d'évaluation
- Section 9.7/12.8: Triple Integrals in Cylindrical and Spherical CoordinatesDocument18 pagesSection 9.7/12.8: Triple Integrals in Cylindrical and Spherical CoordinatesQuantumGlowPas encore d'évaluation
- A Numerical Scheme For Unsteady Flow of A Viscous Fluid Between Elliptic PlatesDocument5 pagesA Numerical Scheme For Unsteady Flow of A Viscous Fluid Between Elliptic PlatesHamid MojiryPas encore d'évaluation
- Analytic Solution of Simplified Cardan's Shaft Model: M. Zaj I Cek, J. DupalDocument14 pagesAnalytic Solution of Simplified Cardan's Shaft Model: M. Zaj I Cek, J. DupalMuhammad FaisalPas encore d'évaluation
- Applied Mathematics and Mechanics: Shanghai University and Springer-Verlag 2008Document8 pagesApplied Mathematics and Mechanics: Shanghai University and Springer-Verlag 2008Nabil MuhammadPas encore d'évaluation
- Convergent Inversion Approximations For Polynomials in Bernstein FormDocument18 pagesConvergent Inversion Approximations For Polynomials in Bernstein FormMaiah DinglasanPas encore d'évaluation
- A New Predictor-Corrector Method For Optimal Power FlowDocument5 pagesA New Predictor-Corrector Method For Optimal Power FlowfpttmmPas encore d'évaluation
- Branlard Notes (Poisson Equation)Document9 pagesBranlard Notes (Poisson Equation)Juan Carlos Morales ParraPas encore d'évaluation
- تحويلات فورير في الفيزياء PDFDocument7 pagesتحويلات فورير في الفيزياء PDFhammoud100% (1)
- MQ Cap7 PDFDocument7 pagesMQ Cap7 PDFmekokiPas encore d'évaluation
- Fejer TheoremDocument10 pagesFejer TheoremVishal NairPas encore d'évaluation
- 1 s2.0 0196885891900139 MainDocument20 pages1 s2.0 0196885891900139 MainRupert smallfawcettPas encore d'évaluation
- Correlation Duality Relations For The (N,, ND) ModelDocument6 pagesCorrelation Duality Relations For The (N,, ND) ModelFlorinMacoveiPas encore d'évaluation
- On The Plane Curves Whose Curvature Depends On The Distance From The OriginDocument8 pagesOn The Plane Curves Whose Curvature Depends On The Distance From The OriginParvathi NPas encore d'évaluation
- Minor2 SolDocument4 pagesMinor2 SolShane WatsonPas encore d'évaluation
- Eigenfunctions of The Laplace-Beltrami Operator On HyperboloidsDocument5 pagesEigenfunctions of The Laplace-Beltrami Operator On HyperboloidsMarcos BrumPas encore d'évaluation
- 11 AbociDocument10 pages11 AbocielectrotehnicaPas encore d'évaluation
- Semi Classic A Electron OpticsDocument15 pagesSemi Classic A Electron Opticslenc46Pas encore d'évaluation
- Wendland1995 Article PiecewisePolynomialPositiveDefDocument8 pagesWendland1995 Article PiecewisePolynomialPositiveDefxiaoyu chenPas encore d'évaluation
- A Sharp Version of Mahler's Inequality For Products of PolynomialsDocument13 pagesA Sharp Version of Mahler's Inequality For Products of PolynomialsLazar MihailPas encore d'évaluation
- Dan Christensen Et Al - Computations Involving Spin Networks, Spin Foams, Quantum Gravity and Lattice Gauge TheoryDocument29 pagesDan Christensen Et Al - Computations Involving Spin Networks, Spin Foams, Quantum Gravity and Lattice Gauge TheoryLopmazPas encore d'évaluation
- The Fokker-Planck EquationDocument12 pagesThe Fokker-Planck EquationslamPas encore d'évaluation
- Entire Course Material All Files Combined For 2011 FinalDocument191 pagesEntire Course Material All Files Combined For 2011 FinalFinian MassaPas encore d'évaluation
- Mit18 02sc Mnotes Cv1Document4 pagesMit18 02sc Mnotes Cv1gizatowerPas encore d'évaluation
- D13 PDFDocument7 pagesD13 PDFHồ ThắngPas encore d'évaluation
- Performance Bounds in MIMO Linear Control With Pole Location ConstraintDocument6 pagesPerformance Bounds in MIMO Linear Control With Pole Location ConstraintpmhiPas encore d'évaluation
- Associated Legendre Functions and Dipole Transition Matrix ElementsDocument16 pagesAssociated Legendre Functions and Dipole Transition Matrix ElementsFrancisco QuiroaPas encore d'évaluation
- A Graphical Derivation of The Legendre Transform: Sam Kennerly April 12, 2011Document9 pagesA Graphical Derivation of The Legendre Transform: Sam Kennerly April 12, 2011mlepck2Pas encore d'évaluation
- Chain RuleDocument8 pagesChain RuletxungoPas encore d'évaluation
- Chapter 10: Solution of Partial Differential Equations (PDE's) Using Hankel TransformsDocument15 pagesChapter 10: Solution of Partial Differential Equations (PDE's) Using Hankel Transformsxmanix2012Pas encore d'évaluation
- MIT6 262S11 Lec02Document11 pagesMIT6 262S11 Lec02Mahmud HasanPas encore d'évaluation
- Statistical Mechanics Lecture Notes (2006), L2Document5 pagesStatistical Mechanics Lecture Notes (2006), L2OmegaUserPas encore d'évaluation
- Eur Difftopgp SolnDocument16 pagesEur Difftopgp SolnVa LentínPas encore d'évaluation
- FormulariumDocument7 pagesFormulariumKamilPas encore d'évaluation
- 9Document10 pages9Laurentiu Chilibaru-Cristina OpritescuPas encore d'évaluation
- Conformal Liouville Theory From D 10 Parallelizable TypeDocument9 pagesConformal Liouville Theory From D 10 Parallelizable TypeAlexander DeckerPas encore d'évaluation
- Evaluation of FourierDocument5 pagesEvaluation of FourierVivek KumarPas encore d'évaluation
- Collomb-Tutorial On Trigonometric Curve FittingDocument15 pagesCollomb-Tutorial On Trigonometric Curve Fittingj.emmett.dwyer1033Pas encore d'évaluation
- Warped Products - PetersenDocument12 pagesWarped Products - PetersenKrishan RajaratnamPas encore d'évaluation
- 1986 Renormalization Group Analysis of Turbulence (5P)Document5 pages1986 Renormalization Group Analysis of Turbulence (5P)LeeSM JacobPas encore d'évaluation
- Counting Number of Subspaces-2Document10 pagesCounting Number of Subspaces-2Adi SubbuPas encore d'évaluation
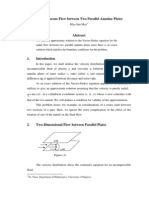
- Radial Viscous Flow Between Two Parallel Annular PlatesDocument12 pagesRadial Viscous Flow Between Two Parallel Annular PlatesKyi Htin PawPas encore d'évaluation
- Equation-Of-Motion Impurity Anderson Model With Finite Coulomb Repulsion BDocument4 pagesEquation-Of-Motion Impurity Anderson Model With Finite Coulomb Repulsion BBilal TariqPas encore d'évaluation
- Research Progress: 1 Routine StuffDocument5 pagesResearch Progress: 1 Routine StuffchichieinsteinPas encore d'évaluation
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianD'EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianÉvaluation : 5 sur 5 étoiles5/5 (1)
- Convolution and Equidistribution: Sato-Tate Theorems for Finite-Field Mellin Transforms (AM-180)D'EverandConvolution and Equidistribution: Sato-Tate Theorems for Finite-Field Mellin Transforms (AM-180)Pas encore d'évaluation
- Chapter 7Document24 pagesChapter 7Muhammad KamranPas encore d'évaluation
- SelectionDocument15 pagesSelectionMuhammad KamranPas encore d'évaluation
- Maths Titles J&BDocument20 pagesMaths Titles J&BMuhammad KamranPas encore d'évaluation
- Circles and SquaresDocument15 pagesCircles and Squaresfanm_belPas encore d'évaluation
- Reflection For His Life STDocument2 pagesReflection For His Life STAriel Aniban Arcamo0% (1)
- Chapter 1Document4 pagesChapter 1fatemehPas encore d'évaluation
- Chapter 6Document57 pagesChapter 6Clang SantiagoPas encore d'évaluation
- Piaget's 4 Stages of Cognitive Development ExplainedDocument26 pagesPiaget's 4 Stages of Cognitive Development ExplainedGengjiaqi CHANGPas encore d'évaluation
- Prufer Ambivalence&DespairDocument11 pagesPrufer Ambivalence&DespairZachariah McVickerPas encore d'évaluation
- Presentation On Seven CsDocument36 pagesPresentation On Seven Csprateekc2967% (3)
- Romantic Criticism of Shakespearen DramaDocument202 pagesRomantic Criticism of Shakespearen DramaRafael EscobarPas encore d'évaluation
- 24 Books That Will Make You A More Well-Rounded Person - Features - Culture - The IndependentDocument42 pages24 Books That Will Make You A More Well-Rounded Person - Features - Culture - The IndependentNatalina Dass Tera LodatoPas encore d'évaluation
- Assessment Plan ShilohDocument2 pagesAssessment Plan Shilohapi-478596695Pas encore d'évaluation
- HerzbergDocument16 pagesHerzbergIrish IsipPas encore d'évaluation
- Free Falling BodiesDocument9 pagesFree Falling BodiesblinturiPas encore d'évaluation
- Module 1 Crim 4Document25 pagesModule 1 Crim 4Emmanuel James BasPas encore d'évaluation
- Creative Talents: Unit 7Document35 pagesCreative Talents: Unit 7Anna Maria RaleaPas encore d'évaluation
- Manthara and Surpanakha PDFDocument4 pagesManthara and Surpanakha PDFKavya KrishnakumarPas encore d'évaluation
- Atheism On The HorizonDocument63 pagesAtheism On The HorizonD'Argo Endymion AgathonPas encore d'évaluation
- Air Pollution University Tun Hussein Onn MalaysiaDocument16 pagesAir Pollution University Tun Hussein Onn Malaysiahanbpjhr50% (2)
- 0010 - People vs. Agpangan 79 Phil. 334, October 10, 1947 PDFDocument7 pages0010 - People vs. Agpangan 79 Phil. 334, October 10, 1947 PDFGra syaPas encore d'évaluation
- English For AcademicDocument7 pagesEnglish For AcademicbonPas encore d'évaluation