Vous aimerez peut-être aussi
- Ekf Excerptmasterthesis PDFDocument7 pagesEkf Excerptmasterthesis PDFyuniervPas encore d'évaluation
- Apm 2.5 Block Diagram: I2C PortDocument1 pageApm 2.5 Block Diagram: I2C PortyuniervPas encore d'évaluation
- Articulo OK VerDocument7 pagesArticulo OK VeryuniervPas encore d'évaluation
- Artigo Backstepping2 4 PDFDocument6 pagesArtigo Backstepping2 4 PDFyuniervPas encore d'évaluation
- GNC ToolboxDocument10 pagesGNC ToolboxyuniervPas encore d'évaluation
- Path-Following For Non-Minimum Phase Systems Removes Performance LimitationsDocument6 pagesPath-Following For Non-Minimum Phase Systems Removes Performance LimitationsyuniervPas encore d'évaluation
- Proportional Valves PDFDocument4 pagesProportional Valves PDFyuniervPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Quiz 2 2013 ThermodynamicDocument2 pagesQuiz 2 2013 ThermodynamicPaartiban PaneerselvamPas encore d'évaluation
- Augustin - A Contribution To The Design of Ribbed PlatesDocument10 pagesAugustin - A Contribution To The Design of Ribbed Platesm2auPas encore d'évaluation
- Sea Water Reverse Osmosis/ Desalination Products: Corrosion-Resistant Products For Superior Life and DependabilityDocument4 pagesSea Water Reverse Osmosis/ Desalination Products: Corrosion-Resistant Products For Superior Life and DependabilitySyed SamsamuddinPas encore d'évaluation
- Ne6 3911gb-MidlumDocument234 pagesNe6 3911gb-MidlumDinu GabrielPas encore d'évaluation
- Bombas Reciprocantes PDFDocument43 pagesBombas Reciprocantes PDFSamuel Arias CamachoPas encore d'évaluation
- "JD" Series Pulling Tool: 4Jdc Operation ManualDocument4 pages"JD" Series Pulling Tool: 4Jdc Operation Manualsong Li100% (1)
- Example 2a: All-Round Fillet Weld Connection Between I Beam and Plate (Simple)Document6 pagesExample 2a: All-Round Fillet Weld Connection Between I Beam and Plate (Simple)Imran SaikatPas encore d'évaluation
- Important RCC Questions-Short and LongDocument15 pagesImportant RCC Questions-Short and LongmailjoelsamuelPas encore d'évaluation
- PPF Multimedia CatalogDocument24 pagesPPF Multimedia Catalogalperen52Pas encore d'évaluation
- Phase Changes Phase DiagramDocument24 pagesPhase Changes Phase DiagramNicolette BingtanPas encore d'évaluation
- C1568 08 (2013)Document6 pagesC1568 08 (2013)diego rodriguez100% (2)
- Datasheet (API 610 - 1 Page)Document8 pagesDatasheet (API 610 - 1 Page)Rudin Fahrudin RahmanPas encore d'évaluation
- SWD Pipe Size Calculation For South CampusDocument4 pagesSWD Pipe Size Calculation For South Campussalmaan mastanPas encore d'évaluation
- Stg-1 TDBFP Isolation NormalisationDocument4 pagesStg-1 TDBFP Isolation Normalisationnetygen1Pas encore d'évaluation
- Function: Torque-Induced Gyroscopic Precession Heading Indicators or Directional GyrosDocument2 pagesFunction: Torque-Induced Gyroscopic Precession Heading Indicators or Directional GyrosVicePas encore d'évaluation
- Installation, Operation, Maintenance, Repair and Troubleshooting Instructions For THE ZSE Fire PumpDocument119 pagesInstallation, Operation, Maintenance, Repair and Troubleshooting Instructions For THE ZSE Fire PumpKashif MasudPas encore d'évaluation
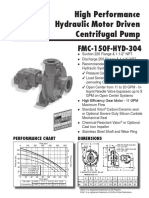
- FMC-150F-HYD-304 - 04-13 Bomba AceDocument2 pagesFMC-150F-HYD-304 - 04-13 Bomba AceEmerson GomesPas encore d'évaluation
- SHM Pendulum Required PracticalDocument3 pagesSHM Pendulum Required PracticalSagar AgrawalPas encore d'évaluation
- CadDocument15 pagesCadBikila JemalPas encore d'évaluation
- CH1Document34 pagesCH1none5402Pas encore d'évaluation
- Timken Tapered Roller Bearings CatalogDocument1 pageTimken Tapered Roller Bearings CatalogFakhar FirdausPas encore d'évaluation
- WB140 2N PDFDocument12 pagesWB140 2N PDFLuisAlbertoVerdejoTapiaPas encore d'évaluation
- International - VT365 (2002-06)Document6 pagesInternational - VT365 (2002-06)Gerard RamPas encore d'évaluation
- Helicoil GB 0180Document40 pagesHelicoil GB 0180MamdouhAlhanafyPas encore d'évaluation
- Electrical Systems Console (S - N 512911001 - 512911999) - 331Document3 pagesElectrical Systems Console (S - N 512911001 - 512911999) - 331Ronaldo Javier Vergara AnayaPas encore d'évaluation
- Hydraulic Quiz 8Document8 pagesHydraulic Quiz 8Aireuxs AdjarainiPas encore d'évaluation
- Installation and User'S Manual 820 LX: Numero de SerieDocument32 pagesInstallation and User'S Manual 820 LX: Numero de SerieAntWonxxxPas encore d'évaluation
- Standard Specification For Standard Specification For: Designation: A 1018/A 1018M - 01a Designation: A 1018/A 1018M - 01aDocument5 pagesStandard Specification For Standard Specification For: Designation: A 1018/A 1018M - 01a Designation: A 1018/A 1018M - 01arahil shahPas encore d'évaluation
- DWGB001Document10 pagesDWGB001LucaPas encore d'évaluation
- Din HandbooksDocument9 pagesDin HandbooksTalha DikenPas encore d'évaluation