Vous aimerez peut-être aussi
- Chevy Differentials: How to Rebuild the 10- and 12-BoltD'EverandChevy Differentials: How to Rebuild the 10- and 12-BoltÉvaluation : 5 sur 5 étoiles5/5 (8)
- How to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsD'EverandHow to Rebuild & Modify Ford C4 & C6 Automatic TransmissionsÉvaluation : 5 sur 5 étoiles5/5 (5)
- Automotive Wheel Alignment System: by Michael Danek Isaac KousariDocument26 pagesAutomotive Wheel Alignment System: by Michael Danek Isaac KousariSandra MarkivPas encore d'évaluation
- Autonomous Vehicle ControlDocument41 pagesAutonomous Vehicle ControlJames GillardPas encore d'évaluation
- J Measurement 2017 04 011Document9 pagesJ Measurement 2017 04 011Rushikesh SadavartePas encore d'évaluation
- Development of Vehicle Dynamics Model Using Adams Car For Formula Student Race Car - NI CommunityDocument1 pageDevelopment of Vehicle Dynamics Model Using Adams Car For Formula Student Race Car - NI CommunityIulian NgiPas encore d'évaluation
- Research Paper On AtvDocument6 pagesResearch Paper On Atvtxnqwcvkg100% (1)
- Vehicle Dynamics: Submitted By: 18AU02 Submitted To: P.Ghilman HaiderDocument14 pagesVehicle Dynamics: Submitted By: 18AU02 Submitted To: P.Ghilman Haiderahmad razaPas encore d'évaluation
- Economic Solution For Data Acquisition in A Formula SAE Race CarDocument6 pagesEconomic Solution For Data Acquisition in A Formula SAE Race CarmclarenrulzPas encore d'évaluation
- Sae J3213-2023Document32 pagesSae J3213-20237620383tlPas encore d'évaluation
- MET2020 Patel MoxitDocument17 pagesMET2020 Patel MoxitSaleh AlotaibiPas encore d'évaluation
- Auto Clutch ControlDocument55 pagesAuto Clutch ControlsenthilmhPas encore d'évaluation
- Bachelor Thesis: Analysis of Vehicle Behavior To Find Criteria For Steering Robot TestsDocument78 pagesBachelor Thesis: Analysis of Vehicle Behavior To Find Criteria For Steering Robot TestsAmit BakshiPas encore d'évaluation
- Drive by Wire Go KartDocument66 pagesDrive by Wire Go KartBien Morfe100% (1)
- Thomson Clutches Brakes CatalogDocument152 pagesThomson Clutches Brakes CatalogElectromatePas encore d'évaluation
- Validation of ADMS/Car Simulations and Dynamic Performance in Multi-Link SuspensionsDocument56 pagesValidation of ADMS/Car Simulations and Dynamic Performance in Multi-Link SuspensionsRhaian BarrosPas encore d'évaluation
- Shock Absorber DynamometerDocument19 pagesShock Absorber DynamometerUmanath R Poojary100% (1)
- Structural Analysis of Double-Wishbone Suspension SystemDocument7 pagesStructural Analysis of Double-Wishbone Suspension SystemIJRASETPublicationsPas encore d'évaluation
- Wheel Balancing Machine Design for Cars and MotorcyclesDocument26 pagesWheel Balancing Machine Design for Cars and MotorcyclesSrinivas100% (1)
- Brake System Design For A Single Seater VehicleDocument27 pagesBrake System Design For A Single Seater VehicleAshraf Zulkafli100% (1)
- Synopsis-Wheel HubDocument4 pagesSynopsis-Wheel Hubrock starPas encore d'évaluation
- Automotive Research HandbookDocument15 pagesAutomotive Research HandbookVinay Nagnath JokarePas encore d'évaluation
- Designing an Optimized Formula SAE Cooling SystemDocument60 pagesDesigning an Optimized Formula SAE Cooling Systemscsurratt50% (2)
- Shivaramu H T Numaan Naveed Ahmed Devdarsh C Ajay and Santhosh Kumar T CDocument8 pagesShivaramu H T Numaan Naveed Ahmed Devdarsh C Ajay and Santhosh Kumar T CHemanth C KPas encore d'évaluation
- Case Study3phyDocument21 pagesCase Study3phylakkapathinisrinidhiPas encore d'évaluation
- The Path To Zero Accidents - Modular Advanced Braking SystemDocument6 pagesThe Path To Zero Accidents - Modular Advanced Braking SystemMarcelo LosekannPas encore d'évaluation
- Case Study2 PhyDocument18 pagesCase Study2 PhylakkapathinisrinidhiPas encore d'évaluation
- Friction Clutches Brakes Ctuk PDFDocument66 pagesFriction Clutches Brakes Ctuk PDFsssf-dobojPas encore d'évaluation
- Adaptive Cruise Control ReportDocument60 pagesAdaptive Cruise Control Reportapi-36231555175% (4)
- PFD and PFMEA Application in Manufacturing Clutch Release ForkDocument12 pagesPFD and PFMEA Application in Manufacturing Clutch Release ForkAnand PathakPas encore d'évaluation
- PV776 TSP23762 1Document70 pagesPV776 TSP23762 1Benjamin Miranda FloresPas encore d'évaluation
- The Re-Design and Analysis of The Suspension System On The Formula Student Race CarDocument53 pagesThe Re-Design and Analysis of The Suspension System On The Formula Student Race CarPabloPas encore d'évaluation
- 2938Document8 pages2938Risira Erantha KannangaraPas encore d'évaluation
- 2011 JettaDocument58 pages2011 JettaRafael Batiati100% (3)
- Columbia Maintenance ManualDocument122 pagesColumbia Maintenance ManualLuis Enrique Lopez Rojas100% (1)
- Chen O Et Al ENPH 459 2013Document27 pagesChen O Et Al ENPH 459 2013LllPas encore d'évaluation
- Shop Manual 830E-1 A40851 & UP PDFDocument1 053 pagesShop Manual 830E-1 A40851 & UP PDFGerardo Esteban Lagos Rojas100% (2)
- Electrically Powered Hydraulic Steering SystemDocument63 pagesElectrically Powered Hydraulic Steering SystemShashi Chaurasia67% (3)
- Quieter Gears PTE1014Document2 pagesQuieter Gears PTE1014ANKITPas encore d'évaluation
- Development and Analysis of A Multi Link SuspensionDocument100 pagesDevelopment and Analysis of A Multi Link SuspensionGianLucaPas encore d'évaluation
- Senior Design Final Report Engineering 340: David Dickensheets Knoa Knapper David Qu Matt ScholtenDocument81 pagesSenior Design Final Report Engineering 340: David Dickensheets Knoa Knapper David Qu Matt ScholtenHamza Laz AliPas encore d'évaluation
- RIT Automotive Dynamometer RedesignDocument33 pagesRIT Automotive Dynamometer RedesignLuís FidalgoPas encore d'évaluation
- FSAE PowerTrain Phase 4 NNDocument80 pagesFSAE PowerTrain Phase 4 NNAnonymous NK2QBE9oPas encore d'évaluation
- Casestudy Sample Document I SEM 2023Document21 pagesCasestudy Sample Document I SEM 2023lakkapathinisrinidhiPas encore d'évaluation
- Simulation Assignment - FinalDocument24 pagesSimulation Assignment - FinalPragathees RamamoorthiPas encore d'évaluation
- Vehicle Steering Systems - Hardware-In-The-Loop Simulator DrivinDocument234 pagesVehicle Steering Systems - Hardware-In-The-Loop Simulator DrivinmacorcheroPas encore d'évaluation
- Automatic Braking System Research PaperDocument5 pagesAutomatic Braking System Research Paperlzpyreqhf100% (1)
- Case Study 1Document17 pagesCase Study 1lakkapathinisrinidhiPas encore d'évaluation
- 08 F2010 ReportDocument80 pages08 F2010 ReportAnantjain93Pas encore d'évaluation
- Seminar ReportDocument21 pagesSeminar Reportabhinav posti100% (1)
- Indiana UniversityDocument64 pagesIndiana Universitymdasifkhan2013Pas encore d'évaluation
- Dot 33850 DS1Document43 pagesDot 33850 DS1Fendy RoynPas encore d'évaluation
- Chassis DynamometerDocument6 pagesChassis DynamometervanessaPas encore d'évaluation
- ASME_RAM_1_2013_Reliability,_AvailabilityDocument24 pagesASME_RAM_1_2013_Reliability,_AvailabilityAmir BakhshiyanPas encore d'évaluation
- ABS User ManualDocument40 pagesABS User ManualAntonio NavarretePas encore d'évaluation
- AC - A04-007-02 - EN - Application Control Manual SMMSiDocument578 pagesAC - A04-007-02 - EN - Application Control Manual SMMSiRoberto FloresPas encore d'évaluation
- Selection of Driveline Components: Applications ManualDocument44 pagesSelection of Driveline Components: Applications ManualمحمدکعبیPas encore d'évaluation
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisD'EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisÉvaluation : 4 sur 5 étoiles4/5 (2)
- The Multibody Systems Approach to Vehicle DynamicsD'EverandThe Multibody Systems Approach to Vehicle DynamicsÉvaluation : 5 sur 5 étoiles5/5 (2)
- Wireless Transmission of Electrical PowerDocument25 pagesWireless Transmission of Electrical PowerMk Enterprise JamuriaPas encore d'évaluation
- 5M Furnace TechnologyDocument8 pages5M Furnace TechnologyFakhri GhrairiPas encore d'évaluation
- An Introduction To Crystal FiltersDocument8 pagesAn Introduction To Crystal FiltersmathurashwaniPas encore d'évaluation
- Physics ProjectDocument18 pagesPhysics ProjectkishorePas encore d'évaluation
- Man#449Document94 pagesMan#449Oscar MarilungoPas encore d'évaluation
- Alternative CurrentDocument4 pagesAlternative CurrentRajeev RanjanPas encore d'évaluation
- VillamorDocument80 pagesVillamorJeremiash ForondaPas encore d'évaluation
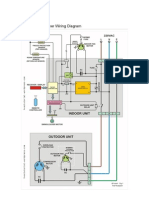
- Split Air Conditioner Wiring Diagram ContactorsDocument8 pagesSplit Air Conditioner Wiring Diagram ContactorsVicente Rossi80% (5)
- My Custom QuizDocument30 pagesMy Custom QuizIsmael GonzalezPas encore d'évaluation
- DGC-2020ES - Accessories Instruction ManualDocument28 pagesDGC-2020ES - Accessories Instruction ManualGiangDoPas encore d'évaluation
- DIY 1000 Watt Wind TurbineDocument9 pagesDIY 1000 Watt Wind Turbinegraham4877Pas encore d'évaluation
- Study On The Residual Current Protection Device TeDocument8 pagesStudy On The Residual Current Protection Device TeyodahePas encore d'évaluation
- Tesla CarDocument24 pagesTesla Carelptrek100% (8)
- Pneumatic Troubleshooting ChartsDocument6 pagesPneumatic Troubleshooting ChartsSHRAVAN KUMARPas encore d'évaluation
- 2x813 Linear Amplifier Cathode Input GW0FZYDocument16 pages2x813 Linear Amplifier Cathode Input GW0FZYGus RudyPas encore d'évaluation
- Transformer Design PDFDocument31 pagesTransformer Design PDFJacinth VarughesePas encore d'évaluation
- Proton Precession MagnetometersDocument52 pagesProton Precession MagnetometersAzmie RisyadPas encore d'évaluation
- McCoy VFO PDFDocument17 pagesMcCoy VFO PDFFrancisco J. Aguilera HiguereyPas encore d'évaluation
- Automatic Water Pump ControllerDocument19 pagesAutomatic Water Pump ControllerSrinivasRaoPas encore d'évaluation
- 11 - First Order CircuitsDocument67 pages11 - First Order CircuitsNaim ParvesPas encore d'évaluation
- RM3545 RM3544 DsDocument12 pagesRM3545 RM3544 DsWira Technic UtamaPas encore d'évaluation
- Smps Design MagneticsDocument2 pagesSmps Design Magneticscrysisfear2Pas encore d'évaluation
- Oscilador de Fuente PFC LG FA5501ADocument26 pagesOscilador de Fuente PFC LG FA5501AAntonio ChavezPas encore d'évaluation
- 1 Form A/1 Form C/2 Form A/2 Form C, 5 A/10 A, Power RelaysDocument14 pages1 Form A/1 Form C/2 Form A/2 Form C, 5 A/10 A, Power RelaysMetehan TuranPas encore d'évaluation
- Electrical CircuitsDocument53 pagesElectrical Circuitssuganyav6Pas encore d'évaluation
- TransformersDocument90 pagesTransformerssujiv_sujiv1278Pas encore d'évaluation
- Long Range FM Transmitter With 2 Watt Power and 1Document4 pagesLong Range FM Transmitter With 2 Watt Power and 1ashar565Pas encore d'évaluation
- Module 10 Visual Inspection and Other NDE Methods and SymbolsDocument41 pagesModule 10 Visual Inspection and Other NDE Methods and SymbolsMiki JaksicPas encore d'évaluation
- Sauer b554-Mch Control CatDocument10 pagesSauer b554-Mch Control CatMohamed RashedPas encore d'évaluation
- Busbar Protection ABMDocument103 pagesBusbar Protection ABMNoli Oteba0% (1)