Vous aimerez peut-être aussi
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageD'EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StoragePas encore d'évaluation
- Dynamic Line Ratings Based on Weather MeasurementsDocument10 pagesDynamic Line Ratings Based on Weather MeasurementsNataGB100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Ampabl - Methodology of Ampacity Calculation For Overhead Line Considering The Effect of Atmospheric Boundary LayerDocument9 pagesAmpabl - Methodology of Ampacity Calculation For Overhead Line Considering The Effect of Atmospheric Boundary Layerintiw_23Pas encore d'évaluation
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringD'EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringPas encore d'évaluation
- A Controlled-Temperature Hot-Wire Anemometer With Voltage Feedback LinearizationDocument6 pagesA Controlled-Temperature Hot-Wire Anemometer With Voltage Feedback LinearizationdanilodspPas encore d'évaluation
- Efficient Simulation of Temperature Evolution of Overhead 2Document11 pagesEfficient Simulation of Temperature Evolution of Overhead 2sam abusiPas encore d'évaluation
- A New Algorithm For Electrical Impedance Tomography Inverse ProblemDocument5 pagesA New Algorithm For Electrical Impedance Tomography Inverse Problemjagomez7896Pas encore d'évaluation
- Sensors: High Sensitivity MEMS Strain Sensor: Design and SimulationDocument20 pagesSensors: High Sensitivity MEMS Strain Sensor: Design and Simulationvijayasarathy2013Pas encore d'évaluation
- TMP 86 FDDocument5 pagesTMP 86 FDFrontiersPas encore d'évaluation
- Measuring Instrument Configurations and FunctionsDocument21 pagesMeasuring Instrument Configurations and FunctionsMukhtar AnasPas encore d'évaluation
- A Modified Method For Tuning PID Controller For Buck-Boost ConverterDocument7 pagesA Modified Method For Tuning PID Controller For Buck-Boost ConverterIJAERS JOURNALPas encore d'évaluation
- DC Time Constant EstimationDocument6 pagesDC Time Constant Estimationrasheed313Pas encore d'évaluation
- Overcurrent and Earth Fault Protection Systems Assessment: Hossein - Askarian@eng - Monash.edu - AuDocument0 pageOvercurrent and Earth Fault Protection Systems Assessment: Hossein - Askarian@eng - Monash.edu - AuAnonymous 9VcxlFErfPas encore d'évaluation
- Analysis of formulas to calculate the AC resistance of different conductorsDocument21 pagesAnalysis of formulas to calculate the AC resistance of different conductorsjesus marquez arvaezPas encore d'évaluation
- Lab - Strain Measurement SystemDocument8 pagesLab - Strain Measurement SystemscribdkimPas encore d'évaluation
- 2 3 PaperDocument6 pages2 3 PaperOm ChoudharyPas encore d'évaluation
- ExtraDocument6 pagesExtraRaja SekarPas encore d'évaluation
- Measuring Contact Resistance in Looped CircuitsDocument4 pagesMeasuring Contact Resistance in Looped CircuitsSenthil CuddaloraPas encore d'évaluation
- Voltage Stability Constrained Available Transfer Capability Calculation Using MatlabDocument11 pagesVoltage Stability Constrained Available Transfer Capability Calculation Using Matlabpralay royPas encore d'évaluation
- PTC Ee Tee 7 Us MPDocument4 pagesPTC Ee Tee 7 Us MPbmmostefaPas encore d'évaluation
- ST97Document7 pagesST97dalcdalcPas encore d'évaluation
- State Estimation and Power Flow Analysis of Power Systems: Jiaxiong ChenDocument7 pagesState Estimation and Power Flow Analysis of Power Systems: Jiaxiong ChenBruno FonsecaPas encore d'évaluation
- Ref62 Bailin - Hughes.1952Document7 pagesRef62 Bailin - Hughes.1952aveliveloPas encore d'évaluation
- Optimizing The Design of A Switched-Capacitor Dynamic-Element-Matching AmplifierDocument6 pagesOptimizing The Design of A Switched-Capacitor Dynamic-Element-Matching Amplifierreza12368Pas encore d'évaluation
- Adaptive MPC Current Control-1Document15 pagesAdaptive MPC Current Control-1sainadh saiPas encore d'évaluation
- Fast Calculation of A Voltage Stability IndexDocument11 pagesFast Calculation of A Voltage Stability IndexphieuxuatkhoPas encore d'évaluation
- HamerstaddDocument5 pagesHamerstadddeepjpgPas encore d'évaluation
- Numerical Analysis of AC Losses in SuperconductorsDocument6 pagesNumerical Analysis of AC Losses in SuperconductorsRaghbendra TiwariPas encore d'évaluation
- Research On A Power Management System For Thermoelectric Generators To Drive Wireless Sensors On A Spindle UnitDocument15 pagesResearch On A Power Management System For Thermoelectric Generators To Drive Wireless Sensors On A Spindle UnitAds SupportPas encore d'évaluation
- Contribution 618 FinalDocument4 pagesContribution 618 Final0kim chanPas encore d'évaluation
- Sag and tension calculations for mountainous terrainDocument8 pagesSag and tension calculations for mountainous terrainSangyt Karna100% (1)
- Voltage Sag Characterization in A Distribution Systems: A Case StudyDocument8 pagesVoltage Sag Characterization in A Distribution Systems: A Case Studyhuycanh2511Pas encore d'évaluation
- Accurate Calculation and Physical Measurement of Trasmission Line Parameters To Improve Impedance Relay PerformanceDocument7 pagesAccurate Calculation and Physical Measurement of Trasmission Line Parameters To Improve Impedance Relay PerformancetunghtdPas encore d'évaluation
- Analysis of Waveform Distortion and Absorbed Powers in Switching Power SuppliesDocument6 pagesAnalysis of Waveform Distortion and Absorbed Powers in Switching Power SuppliesRaj ChavanPas encore d'évaluation
- Transformer Winding ResistanceDocument20 pagesTransformer Winding Resistancekajale.shrikantPas encore d'évaluation
- Evaluating Induced Voltages in PipelinesDocument9 pagesEvaluating Induced Voltages in PipelinessajuaanalsaPas encore d'évaluation
- Core Losses Under DC Bias Condition Based On Steinmetz ParametersDocument8 pagesCore Losses Under DC Bias Condition Based On Steinmetz ParametersAlan SouliePas encore d'évaluation
- Online Control of SVC Using ANN Based Pole Placement ApproachDocument5 pagesOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliPas encore d'évaluation
- A Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueDocument8 pagesA Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueAkash VermaPas encore d'évaluation
- Technol0Gy:Simulationfor: Ualn Suppl"Document4 pagesTechnol0Gy:Simulationfor: Ualn Suppl"Nishanthi BheemanPas encore d'évaluation
- Calculation of Cable Parameters For Different Cable ShapesDocument7 pagesCalculation of Cable Parameters For Different Cable ShapestechtricPas encore d'évaluation
- Radial Temperature Distribution of AAAC Overhead LinesDocument6 pagesRadial Temperature Distribution of AAAC Overhead LinesCarlos Lino Rojas AgüeroPas encore d'évaluation
- Evaluating lightning return stroke current using electromagnetic fieldsDocument20 pagesEvaluating lightning return stroke current using electromagnetic fieldsBat MojPas encore d'évaluation
- Model and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesDocument5 pagesModel and Applications For Harmonic Analysis of Ac/Dc Power Systems Coupled by Power Electronic Converters in High-Power Industrial DrivesRavindranath NaikPas encore d'évaluation
- Unloaded Power TransformerDocument8 pagesUnloaded Power TransformerMadhusudan RaoPas encore d'évaluation
- Ok - (1983) - Transient Analysis of Grounding Systems - MeliopoulosDocument11 pagesOk - (1983) - Transient Analysis of Grounding Systems - MeliopoulosTiago Amanda DiasPas encore d'évaluation
- A Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsDocument10 pagesA Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsjeffguitarPas encore d'évaluation
- GA For Optimal PI in DC Voltage Regulation of D-STATCOMDocument9 pagesGA For Optimal PI in DC Voltage Regulation of D-STATCOMShipra PandeyPas encore d'évaluation
- Detrimental Effects of Capacitors in Distribution Networks in The Presence of Harmonic PollutionDocument5 pagesDetrimental Effects of Capacitors in Distribution Networks in The Presence of Harmonic PollutionLuis CifuentesPas encore d'évaluation
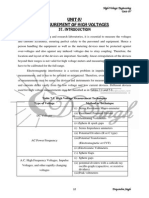
- UNIT-4 of HVEDocument18 pagesUNIT-4 of HVEAayush PatidarPas encore d'évaluation
- Microcontroller-Based Automated Billing SystemDocument7 pagesMicrocontroller-Based Automated Billing SystemMarcelo PerotoniPas encore d'évaluation
- A Simplified Voltage Stability Index (SVSI)Document8 pagesA Simplified Voltage Stability Index (SVSI)Hanish SinghalPas encore d'évaluation
- Basic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. OyarzúnDocument15 pagesBasic Integrated Modelling: A Case Study: Mario E. Salgado and Diego R. Oyarzúnñ=?!2Pas encore d'évaluation
- Annamalai PaperDocument9 pagesAnnamalai PaperPrabu BaskaranPas encore d'évaluation
- CFD and Low-Fidelity Model Optimization of Hypersonic Intake GeometryDocument12 pagesCFD and Low-Fidelity Model Optimization of Hypersonic Intake GeometryAhmad SalahPas encore d'évaluation
- Inverter - Fault Current Contribution PDFDocument6 pagesInverter - Fault Current Contribution PDFbalaeee123Pas encore d'évaluation
- Determination of The Earth Fault Factor in Power Systems For Different Earthed NeutralsDocument6 pagesDetermination of The Earth Fault Factor in Power Systems For Different Earthed Neutralsbisas_rishiPas encore d'évaluation
- Kei 41 CDocument8 pagesKei 41 CPeddi ReddyPas encore d'évaluation
- Is 802 Part1 Sec1Document22 pagesIs 802 Part1 Sec1Archana BarnwalPas encore d'évaluation
- M.S. and high tensile nuts bolts productionDocument5 pagesM.S. and high tensile nuts bolts productionscribddaduPas encore d'évaluation
- Is 5613-1-1 2002 Design of Overhead Power Lines Up To 11 KVDocument26 pagesIs 5613-1-1 2002 Design of Overhead Power Lines Up To 11 KVAlexis Fernandez CordovaPas encore d'évaluation
- Construction Manual For Sub-StationsDocument150 pagesConstruction Manual For Sub-Stationspankaj_electrical0% (1)
- Receiving Welcoming and Greeting of GuestDocument18 pagesReceiving Welcoming and Greeting of GuestMarwa KorkabPas encore d'évaluation
- Stereotype Threat Widens Achievement GapDocument2 pagesStereotype Threat Widens Achievement GapJoePas encore d'évaluation
- Vocabulary Prefixes ExercisesDocument2 pagesVocabulary Prefixes ExercisesMarina García CarrascoPas encore d'évaluation
- Db2 Compatibility PDFDocument23 pagesDb2 Compatibility PDFMuhammed Abdul QaderPas encore d'évaluation
- ATP Draw TutorialDocument55 pagesATP Draw TutorialMuhammad Majid Altaf100% (3)
- Fluorescent sensors for detection of heavy metalsDocument36 pagesFluorescent sensors for detection of heavy metalskawtherahmedPas encore d'évaluation
- Ice Cream: Uses and Method of ManufactureDocument6 pagesIce Cream: Uses and Method of ManufactureMari LizPas encore d'évaluation
- Decision MatrixDocument12 pagesDecision Matrixrdos14Pas encore d'évaluation
- Radical Candor: Fully Revised and Updated Edition: How To Get What You Want by Saying What You Mean - Kim ScottDocument5 pagesRadical Candor: Fully Revised and Updated Edition: How To Get What You Want by Saying What You Mean - Kim Scottzafytuwa17% (12)
- Materi Green SCMDocument38 pagesMateri Green SCManandaailanthusPas encore d'évaluation
- Roman Questions II PDFDocument738 pagesRoman Questions II PDFjlinderski100% (3)
- Recording and reporting in hospitals and nursing collegesDocument48 pagesRecording and reporting in hospitals and nursing collegesRaja100% (2)
- Final Thesis Owura Kofi AmoabengDocument84 pagesFinal Thesis Owura Kofi AmoabengKunal AgarwalPas encore d'évaluation
- Comparing Social Studies Lesson PlansDocument6 pagesComparing Social Studies Lesson PlansArielle Grace Yalung100% (1)
- EdiTasc EDocument89 pagesEdiTasc EOglasnik MostarPas encore d'évaluation
- Discourse Community 2Document7 pagesDiscourse Community 2api-272763663Pas encore d'évaluation
- CV Raman's Discovery of the Raman EffectDocument10 pagesCV Raman's Discovery of the Raman EffectjaarthiPas encore d'évaluation
- Capitalism Communism Socialism DebateDocument28 pagesCapitalism Communism Socialism DebateMr. Graham Long100% (1)
- Evidence My Favorite PlayerDocument2 pagesEvidence My Favorite PlayerReynel Soir0% (1)
- English Class Language DevicesDocument56 pagesEnglish Class Language DevicesKAREN GREGANDAPas encore d'évaluation
- MVC ImpDocument4 pagesMVC ImpsrinathmsPas encore d'évaluation
- Lesson Rubric Team Group (Lesson Plan 1)Document2 pagesLesson Rubric Team Group (Lesson Plan 1)Yodalis VazquezPas encore d'évaluation
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentxandercagePas encore d'évaluation
- PSPO I Question AnswerDocument11 pagesPSPO I Question AnswerAurélie ROUEPas encore d'évaluation
- Upstream Color PDFDocument16 pagesUpstream Color PDFargentronicPas encore d'évaluation
- Finance Process Optimization - Mapping The Journey To High PerformanceDocument3 pagesFinance Process Optimization - Mapping The Journey To High PerformanceStephen G. LynchPas encore d'évaluation
- Chapter 2: Science, Technology, and Society in Human Condition Lesson 1: Human FlourishingDocument5 pagesChapter 2: Science, Technology, and Society in Human Condition Lesson 1: Human FlourishingJcPas encore d'évaluation
- A Personality Trait-Based Interactionist Model of Job PerformanceDocument18 pagesA Personality Trait-Based Interactionist Model of Job PerformanceAlvina AhmedPas encore d'évaluation
- Carnot CycleDocument3 pagesCarnot CyclealexontingPas encore d'évaluation
- Corporate Strategic Planning AssignmentDocument10 pagesCorporate Strategic Planning AssignmentSumit DuttaPas encore d'évaluation
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressD'EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressÉvaluation : 5 sur 5 étoiles5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)D'EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Évaluation : 5 sur 5 étoiles5/5 (2)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsD'EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsPas encore d'évaluation
- SolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)D'EverandSolidWorks 2015 Learn by doing-Part 2 (Surface Design, Mold Tools, and Weldments)Évaluation : 4.5 sur 5 étoiles4.5/5 (5)
- Fusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.D'EverandFusion 360 | Step by Step: CAD Design, FEM Simulation & CAM for Beginners.Pas encore d'évaluation
- Beginning AutoCAD® 2020 Exercise WorkbookD'EverandBeginning AutoCAD® 2020 Exercise WorkbookÉvaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersD'EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersPas encore d'évaluation
- Beginning AutoCAD® 2022 Exercise Workbook: For Windows®D'EverandBeginning AutoCAD® 2022 Exercise Workbook: For Windows®Pas encore d'évaluation
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsD'EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsÉvaluation : 5 sur 5 étoiles5/5 (1)