Vous aimerez peut-être aussi
- BLDC Product GuideDocument36 pagesBLDC Product GuidemjtbbhrmPas encore d'évaluation
- Dsp-Controlled Intelligent High-Performance AC Present FutureDocument8 pagesDsp-Controlled Intelligent High-Performance AC Present FuturePraful YadavPas encore d'évaluation
- AC Servo SystemsDocument42 pagesAC Servo SystemsLe Hai Dang100% (1)
- Moulded Case Circuit Breakers Technical OverviewDocument0 pageMoulded Case Circuit Breakers Technical OverviewJoni Efwan100% (2)
- Industrial SVCDocument4 pagesIndustrial SVChs1986Pas encore d'évaluation
- VSC Product Introduction-EnDocument36 pagesVSC Product Introduction-EnAldeni Prima AnugrahPas encore d'évaluation
- Datasheet MitsubishiDocument105 pagesDatasheet MitsubishiMuhammad Shoaib HussainPas encore d'évaluation
- Dsa 00104955Document68 pagesDsa 00104955Anta MursidikPas encore d'évaluation
- InverterDocument71 pagesInverterAlade Victor100% (14)
- LabVolt Industrial AC DrivesDocument121 pagesLabVolt Industrial AC Drivesumer farooqPas encore d'évaluation
- Research Paper On DC MachinesDocument5 pagesResearch Paper On DC Machinesfyr5efrr100% (1)
- REN an-CM-314 AC-AC Automatic Voltage Regulator APN 20210928 1Document15 pagesREN an-CM-314 AC-AC Automatic Voltage Regulator APN 20210928 1vidalvis avila castillaPas encore d'évaluation
- Shaft VoltagesDocument27 pagesShaft VoltagesMathi JS MatharooPas encore d'évaluation
- Basic Training Motors, Greas & Drives1Document81 pagesBasic Training Motors, Greas & Drives1hulkund_maheshPas encore d'évaluation
- Power Electronics and Motor Drives Recent Progress and PerspectiveDocument12 pagesPower Electronics and Motor Drives Recent Progress and PerspectiveBnr GoudPas encore d'évaluation
- Vehicle Security SystemDocument36 pagesVehicle Security Systemsrinivasan30704Pas encore d'évaluation
- ICARDocument32 pagesICARKusnadi PerdanaPas encore d'évaluation
- 1.constrution of Flying Quad Rotor With Video Surveillance SystemDocument45 pages1.constrution of Flying Quad Rotor With Video Surveillance SystemakhilPas encore d'évaluation
- Design and Execution of A DC Source With High Power and High EfficiencyDocument19 pagesDesign and Execution of A DC Source With High Power and High EfficiencyInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Ijaiem 2013 08 25 054Document11 pagesIjaiem 2013 08 25 054International Journal of Application or Innovation in Engineering & ManagementPas encore d'évaluation
- Case StudyDocument3 pagesCase StudyRogelio AquinoPas encore d'évaluation
- DC Power For Test Rig and Lab: Laboratory Power Supplies Electronic LoadsDocument16 pagesDC Power For Test Rig and Lab: Laboratory Power Supplies Electronic Loadsjose0enar0munozPas encore d'évaluation
- Ring Vco ThesisDocument7 pagesRing Vco Thesisfj8e4mc7100% (1)
- IGBT Applications Handbook PDFDocument122 pagesIGBT Applications Handbook PDF조용규100% (1)
- TB 01000001 eDocument61 pagesTB 01000001 eRicardo LopezPas encore d'évaluation
- IntroductionDocument3 pagesIntroductionaziz balochPas encore d'évaluation
- Complete INVERTER ProjectDocument34 pagesComplete INVERTER Projectalfred adukobirre adukobilla71% (17)
- 05 CCDocument102 pages05 CCEverton Soares PivottoPas encore d'évaluation
- SMAC Actuators User ManualDocument52 pagesSMAC Actuators User ManualElectromatePas encore d'évaluation
- Overview of Industrial Motor Control SystemsDocument8 pagesOverview of Industrial Motor Control Systemsiwuo4797Pas encore d'évaluation
- IEA Grid Connected PV Power Systems PDFDocument64 pagesIEA Grid Connected PV Power Systems PDFces.alexander.cvPas encore d'évaluation
- Evaluation and Comparative Analysis of Speed Performance of Brushless DC Motor Using Digital ControllersDocument20 pagesEvaluation and Comparative Analysis of Speed Performance of Brushless DC Motor Using Digital ControllersIJRASETPublicationsPas encore d'évaluation
- Janjan 3rd Year PrintDocument8 pagesJanjan 3rd Year PrintIVAN JOHN BITONPas encore d'évaluation
- Sprabw0b PDFDocument19 pagesSprabw0b PDFAshok KumarPas encore d'évaluation
- Torque Control of CSI Fed Induction Motor Drives: Electrical Engineering Institute "Nikola Tesla", Belgrade SerbiaDocument27 pagesTorque Control of CSI Fed Induction Motor Drives: Electrical Engineering Institute "Nikola Tesla", Belgrade SerbiarijilpoothadiPas encore d'évaluation
- Moeller Type Test Assembly (TTA)Document8 pagesMoeller Type Test Assembly (TTA)มนตรี เดชธนาศักดิ์Pas encore d'évaluation
- Electric Linear Actuators and Controls Full enDocument51 pagesElectric Linear Actuators and Controls Full ensaleemut3Pas encore d'évaluation
- A High Frequency High Efficiency High Power Factor Isolated OnDocument109 pagesA High Frequency High Efficiency High Power Factor Isolated OnSanyog Jayant PoharePas encore d'évaluation
- PowerFactorCorrectionLV ICARDocument76 pagesPowerFactorCorrectionLV ICARminjut100% (1)
- SMAC 2017 Product CatalogDocument31 pagesSMAC 2017 Product CatalogElectromatePas encore d'évaluation
- IGBT HandbookDocument130 pagesIGBT HandbookmrchlPas encore d'évaluation
- WEG Brushless Excitation System Series Diode Redundancy Usa10023 Brochure English PDFDocument2 pagesWEG Brushless Excitation System Series Diode Redundancy Usa10023 Brochure English PDFusefiPas encore d'évaluation
- Kinetics Industries Manufacturer Of Excitation SystemsDocument78 pagesKinetics Industries Manufacturer Of Excitation SystemsБорис Спасов100% (1)
- KEWO AD Sereis AC Drive Operation Manual 1 - 3V20150921 PDFDocument193 pagesKEWO AD Sereis AC Drive Operation Manual 1 - 3V20150921 PDFUsman Shah100% (4)
- Monitoring Generator Vibration Reveals Previously Undetected 60 Hz SignalsDocument9 pagesMonitoring Generator Vibration Reveals Previously Undetected 60 Hz SignalsKevin Luis Perez QuirozPas encore d'évaluation
- 2003 - Taylor & Francis Chap - Montagu - GS and Resonant ScannersDocument53 pages2003 - Taylor & Francis Chap - Montagu - GS and Resonant ScannersnorbdudePas encore d'évaluation
- Automatic Induction Motor ProjectDocument78 pagesAutomatic Induction Motor ProjectPraveen MathiasPas encore d'évaluation
- ZliuDocument72 pagesZliuprakhar agrawalPas encore d'évaluation
- B1 Function GeneratorDocument59 pagesB1 Function Generatorshaik sha100% (1)
- Power Factor CorrectionDocument48 pagesPower Factor Correctionskaarz86% (7)
- DC 12V To 220V Ac Inverter Making by Using Ic CD4047Document19 pagesDC 12V To 220V Ac Inverter Making by Using Ic CD4047Amartya RoyPas encore d'évaluation
- Power Converters For Wind Turbines: Current and Future DevelopmentDocument13 pagesPower Converters For Wind Turbines: Current and Future DevelopmentLullaby summerPas encore d'évaluation
- Wireless Remote Motor Controller ProjectDocument7 pagesWireless Remote Motor Controller ProjectBoy LiverpoolPas encore d'évaluation
- DC Breaker ABB PDFDocument60 pagesDC Breaker ABB PDFVivek KumawatPas encore d'évaluation
- Customer Specification: Static Excitation System (Ses)Document18 pagesCustomer Specification: Static Excitation System (Ses)Ravindra JadhavPas encore d'évaluation
- Speed Control of DC Motor Using PWM and Microcontroller 8051Document21 pagesSpeed Control of DC Motor Using PWM and Microcontroller 8051Mohit Keshri100% (1)
- Dheeraj ThesisDocument73 pagesDheeraj ThesisAshish BharadePas encore d'évaluation
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlD'EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlÉvaluation : 5 sur 5 étoiles5/5 (1)
- Block DiagramDocument1 pageBlock Diagramwozoo23Pas encore d'évaluation
- Ashby How To Write A PaperDocument47 pagesAshby How To Write A PaperGauri RanadivePas encore d'évaluation
- Schedule of Benefits: State NoticeDocument9 pagesSchedule of Benefits: State Noticewozoo23Pas encore d'évaluation
- EECS 215 Problem Set Cover Page Winter 2012Document1 pageEECS 215 Problem Set Cover Page Winter 2012wozoo23Pas encore d'évaluation
- Condition Sensing SwitchesDocument64 pagesCondition Sensing SwitchesksathishgreenPas encore d'évaluation
- The ARC Navomatic 300A Autopilot: A Concise GuideDocument14 pagesThe ARC Navomatic 300A Autopilot: A Concise GuideJoão AlmeidaPas encore d'évaluation
- JMB-8000 Aseptic Brick Carton Filling Machine For 200-350mlDocument4 pagesJMB-8000 Aseptic Brick Carton Filling Machine For 200-350mlkanon77Pas encore d'évaluation
- Electroneumática AvanzadaDocument216 pagesElectroneumática AvanzadaAlfredo GalarzaPas encore d'évaluation
- TDBFP Manul PDFDocument266 pagesTDBFP Manul PDFsantoshPas encore d'évaluation
- BUL: 3-Way Unit Valve, PN 16: FeaturesDocument8 pagesBUL: 3-Way Unit Valve, PN 16: FeaturesDiego Felipe Orellana AravenaPas encore d'évaluation
- Hawker Beechcraft Services: 3992 Aviation Circle Atlanta, Georgia 30336 Faa Crs Eryr682DDocument6 pagesHawker Beechcraft Services: 3992 Aviation Circle Atlanta, Georgia 30336 Faa Crs Eryr682DSanjuan Galán FernandoPas encore d'évaluation
- Agenda: Damper Types Damper Construction PTF (Pressure/Temperature/Flow) Testing Procedures Applications ConfigurationsDocument62 pagesAgenda: Damper Types Damper Construction PTF (Pressure/Temperature/Flow) Testing Procedures Applications ConfigurationsMarcoCiallellaPas encore d'évaluation
- Process Flow and P&IDs Workbook 2 (Inc Drawings)Document55 pagesProcess Flow and P&IDs Workbook 2 (Inc Drawings)Mahathir Che Ap100% (10)
- ChokesBrochure ENG v01Document12 pagesChokesBrochure ENG v01ermaiezPas encore d'évaluation
- Error Code AxorDocument29 pagesError Code Axordp.plantdeptPas encore d'évaluation
- Catalogo Valvulas de ControlDocument116 pagesCatalogo Valvulas de ControlEberth Jose Briceño DelgadoPas encore d'évaluation
- Calibracion E69PDocument16 pagesCalibracion E69PmktcablePas encore d'évaluation
- DDocument47 pagesDshaonaaPas encore d'évaluation
- Aumapresentation For MaticDocument73 pagesAumapresentation For MaticAxlejunz Dublin Rondina0% (1)
- Isa Symbols PDFDocument3 pagesIsa Symbols PDFpekmidePas encore d'évaluation
- Iyappan Engg ProductsDocument91 pagesIyappan Engg Productsapi-3827823Pas encore d'évaluation
- Valvula de Control ParkingDocument5 pagesValvula de Control ParkingmartinaguilarespinoPas encore d'évaluation
- KP STK 3 25 19aDocument255 pagesKP STK 3 25 19afcarrera.tssmxPas encore d'évaluation
- Book of Cannon Patent DrawingsDocument478 pagesBook of Cannon Patent DrawingsToz Koparan100% (8)
- 190 e Cr302 en Servomotors-For-steam-turbinesDocument10 pages190 e Cr302 en Servomotors-For-steam-turbinesscribdkhatnPas encore d'évaluation
- Solutions Book Activity 6.1 To 6.7Document11 pagesSolutions Book Activity 6.1 To 6.7mooPas encore d'évaluation
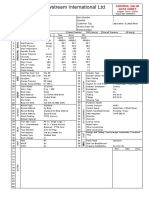
- Control Valve Data SheetDocument6 pagesControl Valve Data SheetsisesetPas encore d'évaluation
- DPFC Quick Start Guide Setup and InstallationDocument24 pagesDPFC Quick Start Guide Setup and InstallationsakarisoPas encore d'évaluation
- Instruction Manual Fisher Fieldvue dvc6000f Digital Valve Controllers Supported en 125592 PDFDocument392 pagesInstruction Manual Fisher Fieldvue dvc6000f Digital Valve Controllers Supported en 125592 PDFEnerprec SASPas encore d'évaluation
- Catalogo Fluid Control FMCDocument80 pagesCatalogo Fluid Control FMCGustavo JassoPas encore d'évaluation
- PIBCV-40Document2 pagesPIBCV-40James ChanPas encore d'évaluation
- Catalog Auma Tigron Explosion Proof - PT - SCMDocument24 pagesCatalog Auma Tigron Explosion Proof - PT - SCMBachtiar SPas encore d'évaluation
- Syllabus BOM PDFDocument2 pagesSyllabus BOM PDFKanwar Pal Singh DhillonPas encore d'évaluation
- Phobos Ma PDFDocument9 pagesPhobos Ma PDFIoan PascuPas encore d'évaluation