Vous aimerez peut-être aussi
- ORDEM DE SERVIÇO - SoldadorDocument3 pagesORDEM DE SERVIÇO - SoldadorRafael Moreira Cassiano75% (20)
- Ficha Anamnese Capilar..Document2 pagesFicha Anamnese Capilar..Ana Paula Cunha49% (39)
- MODELO Relatorio PalestraDocument4 pagesMODELO Relatorio PalestraWeslley EnthonnyPas encore d'évaluation
- Estrutura de Relatório de Trabalho de CampoDocument2 pagesEstrutura de Relatório de Trabalho de CampoFlávia Regina CavalcantePas encore d'évaluation
- Econometria Series FinanceirasDocument55 pagesEconometria Series FinanceirasVede Teus Berna Manberna100% (1)
- DENSODocument33 pagesDENSONilson BarbosaPas encore d'évaluation
- Enem Picos Pi Machado de Assis 15 09Document10 pagesEnem Picos Pi Machado de Assis 15 09DanielMatematicaColaresPas encore d'évaluation
- NBR 12142Document3 pagesNBR 12142Carlos MaiaPas encore d'évaluation
- BIC Tabela Comissoes DespesasDocument35 pagesBIC Tabela Comissoes DespesasbrawnysoaresPas encore d'évaluation
- Portugal - 2. Metade Do Seculo XIXDocument16 pagesPortugal - 2. Metade Do Seculo XIXNelsonMatias100% (1)
- 20 Programa de Afiliados Rentáveis para Ganhar Dinheiro OnlineDocument16 pages20 Programa de Afiliados Rentáveis para Ganhar Dinheiro Onlineluiz reeyPas encore d'évaluation
- 1° Questionário de Estagio 1Document3 pages1° Questionário de Estagio 1cspuhlPas encore d'évaluation
- Caixa II - PeE - 18 - 02 - 16Document2 pagesCaixa II - PeE - 18 - 02 - 16Gelson Fernandes FernandesPas encore d'évaluation
- LAMINA SubDrive Inline 1100Document2 pagesLAMINA SubDrive Inline 1100Marcos RighettoPas encore d'évaluation
- HD X SSD PDFDocument4 pagesHD X SSD PDFFabricio DornellesPas encore d'évaluation
- 54518705cap-19 - Partida Eletrica CB600FDocument19 pages54518705cap-19 - Partida Eletrica CB600Fivanmariano1978Pas encore d'évaluation
- Catálogos Operadoras de TelecartofiliaDocument1 859 pagesCatálogos Operadoras de TelecartofiliamarceloprcPas encore d'évaluation
- Aulas LajesDocument11 pagesAulas LajesitalokaiquePas encore d'évaluation
- Play Planif Anual 5 AnoDocument6 pagesPlay Planif Anual 5 Anopipinha33Pas encore d'évaluation
- Anais Do V Seminário Brasileiro Sobre o Pensamento de Jacques EllulDocument277 pagesAnais Do V Seminário Brasileiro Sobre o Pensamento de Jacques EllulMaria Cristina VendrametoPas encore d'évaluation
- Manual de Elaboracao de Projetos Viarios para o Municipio de BH - Publicação 17-11-11Document175 pagesManual de Elaboracao de Projetos Viarios para o Municipio de BH - Publicação 17-11-11cranfiPas encore d'évaluation
- Apostila Informatica BasicaDocument137 pagesApostila Informatica BasicaEdinéia RibeiroPas encore d'évaluation
- Licenciamento Actividade Estabelecimento Apoio SocialDocument15 pagesLicenciamento Actividade Estabelecimento Apoio SocialManuel DiasPas encore d'évaluation
- Faseamento Das Redes de DistribuiçãoDocument8 pagesFaseamento Das Redes de DistribuiçãoAlex Barbosa CamiloPas encore d'évaluation
- RotativasDocument6 pagesRotativasAnderson AntunesPas encore d'évaluation
- Sistema PortuguesDocument70 pagesSistema PortuguesAntónio FerreiraPas encore d'évaluation
- Modelo Envio Discente - Atividade ContextualizadaDocument1 pageModelo Envio Discente - Atividade ContextualizadaAmanda NascimentoPas encore d'évaluation
- AW139 MANUAL DE EMERGÊNCIA em Português RevisadoDocument195 pagesAW139 MANUAL DE EMERGÊNCIA em Português RevisadoMATHEUS MOURAPas encore d'évaluation
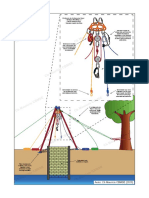
- Resgate em PoçoDocument1 pageResgate em PoçoCarlos BenicioPas encore d'évaluation
- Tabela ASCIIDocument4 pagesTabela ASCIILeonardo Zanzotte CalvelhePas encore d'évaluation