Vous aimerez peut-être aussi
- Normal ModesDocument49 pagesNormal ModesEsteban RodríguezPas encore d'évaluation
- WilberforceDocument16 pagesWilberforce123chess0% (1)
- Notes On Mechanical Vibrations: 1 Masses and Springs-The Linear OscillatorDocument10 pagesNotes On Mechanical Vibrations: 1 Masses and Springs-The Linear Oscillatoramlandas08Pas encore d'évaluation
- Damped Harmonic Oscillators: Spring Mass X Dashpot FDocument3 pagesDamped Harmonic Oscillators: Spring Mass X Dashpot FMuhammad Hasan RazaPas encore d'évaluation
- SHM NotesDocument4 pagesSHM Notesgiulio.zizzo2850Pas encore d'évaluation
- Vibration of Two Degree of Freedom SystemDocument23 pagesVibration of Two Degree of Freedom SystemDewa Ayu Mery AgustinPas encore d'évaluation
- 8 Coupled Oscillators and Normal Modes Fall 2003: K M. But When TwoDocument6 pages8 Coupled Oscillators and Normal Modes Fall 2003: K M. But When TwoAratz HernandezPas encore d'évaluation
- The Simple Harmonic OscillatorDocument7 pagesThe Simple Harmonic OscillatorArchit SharmaPas encore d'évaluation
- Applications of 2nd-Order Differential EquationsDocument18 pagesApplications of 2nd-Order Differential EquationsNurPas encore d'évaluation
- Vibration TechnologyDocument39 pagesVibration TechnologyHari Tej AvvaruPas encore d'évaluation
- Chapter 1: Oscillations Hour: 1 1. Introduction To Oscillation and VibrationDocument19 pagesChapter 1: Oscillations Hour: 1 1. Introduction To Oscillation and VibrationVivek kapoorPas encore d'évaluation
- Classical & Quantum Harmonic OscillatorsDocument4 pagesClassical & Quantum Harmonic OscillatorsFredrick MutungaPas encore d'évaluation
- Handout M.4 - Solutions of Ordinary Differential Equations: F T KX T X C T X MDocument15 pagesHandout M.4 - Solutions of Ordinary Differential Equations: F T KX T X C T X MTushar DeshpandePas encore d'évaluation
- Physics Final Exam GuideDocument8 pagesPhysics Final Exam Guideskw1990Pas encore d'évaluation
- Vibrations in Engineering: Faculty of Civil Engineering and Applied MechanicsDocument133 pagesVibrations in Engineering: Faculty of Civil Engineering and Applied Mechanicsvuhoangdai90Pas encore d'évaluation
- Dynsmics of Aerospace Structures LectureDocument392 pagesDynsmics of Aerospace Structures LecturevanmiloPas encore d'évaluation
- WEEK 8 Further Physics Solutions From Konrad HarradineDocument6 pagesWEEK 8 Further Physics Solutions From Konrad HarradineDulwich PhysicsPas encore d'évaluation
- Coupled Spring PDFDocument16 pagesCoupled Spring PDFa_oucharPas encore d'évaluation
- Coupled OscillationsDocument3 pagesCoupled OscillationsGurvir SinghPas encore d'évaluation
- Adv Mech2Document6 pagesAdv Mech2stefanovicana1Pas encore d'évaluation
- Physics430 Lecture15Document16 pagesPhysics430 Lecture15Onimash RajuPas encore d'évaluation
- 13 Oscillatoryor Periodic Motion Rev 2Document12 pages13 Oscillatoryor Periodic Motion Rev 2Eslam HashimPas encore d'évaluation
- Lecture Ii-6: Gauge Theory in 2 Dimensions With Self-Interacting Bosons, The Wilson Line Operator, and Confinement Edward WittenDocument9 pagesLecture Ii-6: Gauge Theory in 2 Dimensions With Self-Interacting Bosons, The Wilson Line Operator, and Confinement Edward WittenluisdanielPas encore d'évaluation
- 17.3: Applications of Second-Order Differential Equations: Simple Harmonic MotionDocument13 pages17.3: Applications of Second-Order Differential Equations: Simple Harmonic MotionHội NguyễnPas encore d'évaluation
- Plane Waves and Wave Propagation: Augustin Jean Fresnel (1788 - 1827) November 9, 2001Document58 pagesPlane Waves and Wave Propagation: Augustin Jean Fresnel (1788 - 1827) November 9, 2001Simon RugenyiPas encore d'évaluation
- Chapter1 PDFDocument13 pagesChapter1 PDFnkoreisha7752Pas encore d'évaluation
- Ecn de OndaDocument5 pagesEcn de OndaVictor LozanoPas encore d'évaluation
- Structural Dynamics Fundamentals in <40 CharactersDocument12 pagesStructural Dynamics Fundamentals in <40 CharactersrajPas encore d'évaluation
- Oscillations: Normal Modes and FrequenciesDocument65 pagesOscillations: Normal Modes and FrequenciesChethan PrathapPas encore d'évaluation
- Notesinstalment2 PDFDocument26 pagesNotesinstalment2 PDFVikas NarangPas encore d'évaluation
- Nonlinear DynamicsDocument84 pagesNonlinear DynamicsMilad S. HaghighiPas encore d'évaluation
- Hw4 SolutionsDocument7 pagesHw4 SolutionsAn Nahl100% (1)
- Mechanics 3 Revision NotesDocument45 pagesMechanics 3 Revision NotesDexter FungPas encore d'évaluation
- Modeling Damped Vibrations Using Differential EquationsDocument8 pagesModeling Damped Vibrations Using Differential Equations05ITB Nishant PandeyPas encore d'évaluation
- Normal Modes TextDocument13 pagesNormal Modes TextVie YaPas encore d'évaluation
- Block 9 NotesDocument24 pagesBlock 9 NotesRusting StardustPas encore d'évaluation
- Ap 3Document45 pagesAp 3MARTÍN SOLANO MARTÍNEZPas encore d'évaluation
- MIT2 003SCF11 Pset9 SolDocument10 pagesMIT2 003SCF11 Pset9 SolDasaka BrahmendraPas encore d'évaluation
- Vibrating Systems ExplainedDocument33 pagesVibrating Systems Explainedsumitsaha263Pas encore d'évaluation
- Goldstein Classical Mechanics - Chap15Document53 pagesGoldstein Classical Mechanics - Chap15ncrusaiderPas encore d'évaluation
- Nonlinear Oscillator Perturbation TheoryDocument19 pagesNonlinear Oscillator Perturbation TheoryAthul S GovindPas encore d'évaluation
- Classical HamiltonianDocument4 pagesClassical Hamiltonianbatenas1Pas encore d'évaluation
- Wave Phenomena: Physics 15cDocument29 pagesWave Phenomena: Physics 15cKattari DwiPas encore d'évaluation
- Hyperbolic equations explainedDocument14 pagesHyperbolic equations explainedB Raghavendra BejgamPas encore d'évaluation
- QFT BoccioDocument63 pagesQFT Bocciounima3610Pas encore d'évaluation
- Class 17Document33 pagesClass 17Mohamed AslamPas encore d'évaluation
- Bab 17 Sistem Getaran1Document29 pagesBab 17 Sistem Getaran1novitia latifahPas encore d'évaluation
- Simple Harmonic Motion, SuperpositionDocument9 pagesSimple Harmonic Motion, SuperpositionSaurav KumarPas encore d'évaluation
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pages1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghPas encore d'évaluation
- First Integrals. Reduction. The 2-Body ProblemDocument19 pagesFirst Integrals. Reduction. The 2-Body ProblemShweta SridharPas encore d'évaluation
- STRC201 Sdof JMWB PDFDocument99 pagesSTRC201 Sdof JMWB PDFAkash ChandraPas encore d'évaluation
- Lattice Vibrations and Phonon Dispersion RelationsDocument12 pagesLattice Vibrations and Phonon Dispersion RelationsKartikay5Pas encore d'évaluation
- Feynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsD'EverandFeynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsPas encore d'évaluation
- Problems in Quantum Mechanics: Third EditionD'EverandProblems in Quantum Mechanics: Third EditionÉvaluation : 3 sur 5 étoiles3/5 (2)
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11D'EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Pas encore d'évaluation
- Three Blank PagesDocument3 pagesThree Blank PagesanonymousxxPas encore d'évaluation
- BlankDocument1 pageBlankanonymousxxPas encore d'évaluation
- Nonlinear VibrationsDocument153 pagesNonlinear VibrationsBosonUpPas encore d'évaluation
- Inverted Pendulum Design With Hardware Fuzzy Logic ControllerDocument6 pagesInverted Pendulum Design With Hardware Fuzzy Logic ControlleranonymousxxPas encore d'évaluation
- Dslam Commissioning Steps Punjab For 960 PortDocument8 pagesDslam Commissioning Steps Punjab For 960 Portanl_bhn100% (1)
- QF-16 Security ProceduresDocument55 pagesQF-16 Security Proceduresmaruka33Pas encore d'évaluation
- Orbeez Sorting and Patterns Learning ExperienceDocument5 pagesOrbeez Sorting and Patterns Learning Experienceapi-349800041Pas encore d'évaluation
- Mitsubishi Evo Vii Workshop ManualDocument1 471 pagesMitsubishi Evo Vii Workshop ManuallimaynardPas encore d'évaluation
- Entrepreneurship Starting and Operating A Small Business 4th Edition Mariotti Test Bank Full Chapter PDFDocument33 pagesEntrepreneurship Starting and Operating A Small Business 4th Edition Mariotti Test Bank Full Chapter PDFmelrosecontrastbtjv1w100% (13)
- Optimize Your Portfolio With Modern TheoriesDocument65 pagesOptimize Your Portfolio With Modern Theoriesastro9jyotish9asim9mPas encore d'évaluation
- Heat Exchangers: Thermal Activity and Fluid MotionDocument14 pagesHeat Exchangers: Thermal Activity and Fluid Motionishu vohraPas encore d'évaluation
- Jurnal Aceh MedikaDocument10 pagesJurnal Aceh MedikaJessica SiraitPas encore d'évaluation
- Lesson 5 The 19th Century PhilippinesDocument5 pagesLesson 5 The 19th Century PhilippinesJoquem PamesaPas encore d'évaluation
- Odoo Video Conference User GuidesDocument12 pagesOdoo Video Conference User GuidesZeus TitanPas encore d'évaluation
- Climate Change ReactionDocument2 pagesClimate Change ReactionAngelika CotejoPas encore d'évaluation
- Syllabus 2012 Singing 20190122Document91 pagesSyllabus 2012 Singing 20190122suzypienaarPas encore d'évaluation
- DHRM 3 SyllabusDocument10 pagesDHRM 3 SyllabusCherokee Tuazon RodriguezPas encore d'évaluation
- Axial and Appendicular Muscles GuideDocument10 pagesAxial and Appendicular Muscles GuideYasmeen AlnajjarPas encore d'évaluation
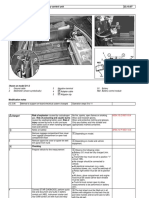
- Checking battery control unitDocument3 pagesChecking battery control unitjuanPas encore d'évaluation
- Brief History of Gifted and Talented EducationDocument4 pagesBrief History of Gifted and Talented Educationapi-336040000Pas encore d'évaluation
- The DHCP Snooping and DHCP Alert Method in SecurinDocument9 pagesThe DHCP Snooping and DHCP Alert Method in SecurinSouihi IslemPas encore d'évaluation
- SAP Untangled: An Introductory Guide To SAP For New HomesDocument28 pagesSAP Untangled: An Introductory Guide To SAP For New HomestempuserPas encore d'évaluation
- 1st Activity in ACCA104Document11 pages1st Activity in ACCA104John Rey BonitPas encore d'évaluation
- ZetaPlus EXT SP Series CDocument5 pagesZetaPlus EXT SP Series Cgeorgadam1983Pas encore d'évaluation
- Urea CycleDocument2 pagesUrea CycleyoungdandarePas encore d'évaluation
- Sexual ExtacyDocument18 pagesSexual ExtacyChal JhonnyPas encore d'évaluation
- Celene Stained Glass ColoursDocument4 pagesCelene Stained Glass ColoursRathna ChalamPas encore d'évaluation
- Record of Appropriations and Obligations: TotalDocument1 pageRecord of Appropriations and Obligations: TotaljomarPas encore d'évaluation
- Adjectives For A Businessman 2023Document2 pagesAdjectives For A Businessman 2023elyvuujavierPas encore d'évaluation
- Principles of The Doctrine of ChristDocument17 pagesPrinciples of The Doctrine of ChristNovus Blackstar100% (2)
- Modern Pharmacy Layout TrendsDocument9 pagesModern Pharmacy Layout TrendsRaheem KhanPas encore d'évaluation
- A Better Kiln CoatingDocument2 pagesA Better Kiln Coatingamir100% (4)
- Visvesvaraya Technological University BelagaviDocument148 pagesVisvesvaraya Technological University BelagavichetanbvPas encore d'évaluation
- Right to Personal Liberty and Judicial Process in IndiaDocument636 pagesRight to Personal Liberty and Judicial Process in IndiaDrDiana PremPas encore d'évaluation