Vous aimerez peut-être aussi
- Aula 2 - Raciocinio Lógico - Graficos e FunçõesDocument26 pagesAula 2 - Raciocinio Lógico - Graficos e FunçõesEdmilson_Q_FilhoPas encore d'évaluation
- Sintaxe Básica Java ScriptDocument20 pagesSintaxe Básica Java ScriptEdmilson_Q_FilhoPas encore d'évaluation
- AsmDocument59 pagesAsmCristysROPas encore d'évaluation
- PMCanvas EditalSENAISESI2015Document1 pagePMCanvas EditalSENAISESI2015Edmilson_Q_FilhoPas encore d'évaluation
- Introducao Ao PICDocument51 pagesIntroducao Ao PICcesarcemPas encore d'évaluation
- Processos EstocásticosDocument13 pagesProcessos EstocásticosEdmilson_Q_FilhoPas encore d'évaluation
- Mozzer-Estudo de Técnicas de Controle Aplicada Ao Sistema PênduloDocument58 pagesMozzer-Estudo de Técnicas de Controle Aplicada Ao Sistema PênduloMichael McgeePas encore d'évaluation
- Un2-Rede DevicenetDocument38 pagesUn2-Rede DevicenetEdmilson_Q_FilhoPas encore d'évaluation
- (ARTIGO TÉCNICO) O Uso de Canaletas Metálicas Minimizando As Correntes de Foucalt em Instalações PROFIBUSDocument5 pages(ARTIGO TÉCNICO) O Uso de Canaletas Metálicas Minimizando As Correntes de Foucalt em Instalações PROFIBUSEdmilson_Q_FilhoPas encore d'évaluation
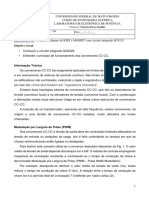
- Circuito SG3525 conversor CC-CCDocument7 pagesCircuito SG3525 conversor CC-CCNikolas Augusto100% (1)
- 580M RetroescavadeiraDocument6 pages580M RetroescavadeiraJerônimo RafaelPas encore d'évaluation
- Programa de Gerenciamento de Riscos: Álvaro Dos Santos Arruda - Engenheiro de Segurança Do TrabalhoDocument41 pagesPrograma de Gerenciamento de Riscos: Álvaro Dos Santos Arruda - Engenheiro de Segurança Do TrabalhoAlvaro S. Arruda100% (4)
- Caderno 1 - Eear Brasil - MatematicaDocument62 pagesCaderno 1 - Eear Brasil - MatematicaRicciardo SilvaPas encore d'évaluation
- 1 Estudo Dirigido HDIDocument8 pages1 Estudo Dirigido HDIJullyana BorbaPas encore d'évaluation
- Reiri 1Document69 pagesReiri 1Rainbow. .dashlokaaPas encore d'évaluation
- AULA 10 Sem Centros Introducao PDFDocument23 pagesAULA 10 Sem Centros Introducao PDFMarcos SídneyPas encore d'évaluation
- FundamentosDocument2 pagesFundamentosCleo CoelhoPas encore d'évaluation
- Penas, Características Externas e Esqueleto Das AvesDocument85 pagesPenas, Características Externas e Esqueleto Das AvesGraziele SilvaPas encore d'évaluation
- Oferta de conselhos e reflexões sobre a vidaDocument12 pagesOferta de conselhos e reflexões sobre a vidaFatima4BretzPas encore d'évaluation
- Céus Caninos DefensoresDocument3 pagesCéus Caninos DefensoresAlessandro Cater D. MarquesPas encore d'évaluation
- Ventilador pulmonar VLP 6000 para emergênciasDocument1 pageVentilador pulmonar VLP 6000 para emergênciasailson.marins sl98104120Pas encore d'évaluation
- Exercício de Revisão 9 AnoDocument4 pagesExercício de Revisão 9 AnoJéssica LaynePas encore d'évaluation
- Honda New Civic 1.8 2006Document3 pagesHonda New Civic 1.8 2006Pedro Almeida Junior100% (1)
- Chef Flexivel - 100 Receitas para Bater Os MacrosDocument131 pagesChef Flexivel - 100 Receitas para Bater Os MacrosallonsoPas encore d'évaluation
- Psicologia e ReligiãoDocument7 pagesPsicologia e ReligiãoFranciscoWalissonPas encore d'évaluation
- Manual Compressor TraduzidoDocument80 pagesManual Compressor TraduzidoNoelson SilvaPas encore d'évaluation
- Lubrificação de Eixos LinearesDocument2 pagesLubrificação de Eixos LinearesiapglPas encore d'évaluation
- Prova Eags 2023 Cod 20 PDF Rede Elétrica FuDocument2 pagesProva Eags 2023 Cod 20 PDF Rede Elétrica FuFabio HorsayPas encore d'évaluation
- Teoria Dos SistemasDocument4 pagesTeoria Dos SistemaspghopoPas encore d'évaluation
- Boletim 40 03.10.2021Document4 pagesBoletim 40 03.10.2021tiagoscarneiroPas encore d'évaluation
- A visão extraordinária de levar o Homem à LuaDocument4 pagesA visão extraordinária de levar o Homem à LuaAna MartinsPas encore d'évaluation
- Ficha Técnica Conservação e RestauraçãoDocument7 pagesFicha Técnica Conservação e RestauraçãoLiz RamírezPas encore d'évaluation
- Vagão Forrageiro ManualDocument82 pagesVagão Forrageiro ManualTORNEARIA LIPPERTPas encore d'évaluation
- Medindo Vibração GuiaDocument46 pagesMedindo Vibração GuiaFelipe PimentaPas encore d'évaluation
- Estudo Dirigido (A1) - Saneamento. GABARITODocument2 pagesEstudo Dirigido (A1) - Saneamento. GABARITOandersonPas encore d'évaluation
- RESOLUÇÃO 996Document6 pagesRESOLUÇÃO 996ritielesimeoliPas encore d'évaluation
- Plano Recuperação Desastres PRDDocument3 pagesPlano Recuperação Desastres PRDAndersonPas encore d'évaluation
- Teste de pressão de bomba de combustívelDocument2 pagesTeste de pressão de bomba de combustívelClaudio PrataPas encore d'évaluation
- Gestão do Tempo: Autoavaliação em 40 QuestõesDocument5 pagesGestão do Tempo: Autoavaliação em 40 QuestõesAndrea CoelhoPas encore d'évaluation