Vous aimerez peut-être aussi
- Ejercicios de Ecuaciones Diferenciales OrdinariasD'EverandEjercicios de Ecuaciones Diferenciales OrdinariasÉvaluation : 4 sur 5 étoiles4/5 (1)
- ECUACION DIFE CalculoDocument8 pagesECUACION DIFE CalculoStefany Ines Prince SeasPas encore d'évaluation
- ShootingDocument15 pagesShootingclifford_torresPas encore d'évaluation
- ApuntesEDOProf LidiaOrtega PDFDocument250 pagesApuntesEDOProf LidiaOrtega PDFantonio009gPas encore d'évaluation
- Análisis Cualitativo de Sistemas Autónomos LinealesDocument2 pagesAnálisis Cualitativo de Sistemas Autónomos Linealesbartle290171Pas encore d'évaluation
- Ecuaciones Diferenciales ResueltasDocument3 pagesEcuaciones Diferenciales ResueltasamandaPas encore d'évaluation
- Variacion de ParametrosDocument4 pagesVariacion de Parametrost160392Pas encore d'évaluation
- Semestral Uni - Álgebra Semana 15Document19 pagesSemestral Uni - Álgebra Semana 15JUAN ROBERTOPas encore d'évaluation
- Guia 1,2 Ecuaciones DiferencialesDocument26 pagesGuia 1,2 Ecuaciones DiferencialesPablo Andres SáenzPas encore d'évaluation
- Ejercicios Resueltos de Series IIDocument5 pagesEjercicios Resueltos de Series IIFrancisca RojasPas encore d'évaluation
- Ejercicios de SeriesDocument4 pagesEjercicios de SeriesChristian CarrerasPas encore d'évaluation
- E Ejercicios Resueltos Analisis Lineal Series de FourierDocument6 pagesE Ejercicios Resueltos Analisis Lineal Series de FourierJosePas encore d'évaluation
- Burden-Issuupdf 2Document40 pagesBurden-Issuupdf 2Vicente AriasPas encore d'évaluation
- Calculo IIIDocument188 pagesCalculo IIIEve RiosPas encore d'évaluation
- Resumen Capitulo 1 Denis ZillDocument2 pagesResumen Capitulo 1 Denis ZillJosé MaselPas encore d'évaluation
- Copia de Matematicas Actividad #2Document6 pagesCopia de Matematicas Actividad #2Darwin Steward0% (1)
- Unidad 2. Las Ecuaciones Diferenciales de Primer Orden y Sus SolucionesDocument18 pagesUnidad 2. Las Ecuaciones Diferenciales de Primer Orden y Sus SolucionesGil Sandro GómezPas encore d'évaluation
- Practica Dirigida 2 Derivada Parcial y DireccionalDocument2 pagesPractica Dirigida 2 Derivada Parcial y DireccionalArturo CamonesPas encore d'évaluation
- Ecuaciones Diferenciales con Transformada de LaplaceDocument49 pagesEcuaciones Diferenciales con Transformada de LaplaceSebastián Pazmiño LaraPas encore d'évaluation
- Series Criterios de ConvergenciaDocument5 pagesSeries Criterios de ConvergenciafrikikillPas encore d'évaluation
- Monografia de Espacio VectorialDocument9 pagesMonografia de Espacio VectorialMaik TunquePas encore d'évaluation
- Ejercicios resueltos de ecuaciones diferenciales parciales y ordinarias mediante SpyderDocument20 pagesEjercicios resueltos de ecuaciones diferenciales parciales y ordinarias mediante SpyderEinstein VargasPas encore d'évaluation
- Polinomios de HermiteDocument19 pagesPolinomios de HermiteCarmen DmzPas encore d'évaluation
- Corrección Segundo Parcial, Ecuaciones Diferenciales, Semestre I 2007Document10 pagesCorrección Segundo Parcial, Ecuaciones Diferenciales, Semestre I 2007Hans Müller Santa Cruz50% (2)
- Variación de Parámetros PDFDocument10 pagesVariación de Parámetros PDFIris Barra SassoPas encore d'évaluation
- Ecuaciones Diferenciales Parciales 14Document18 pagesEcuaciones Diferenciales Parciales 14Las Vainas De los Andes.Pas encore d'évaluation
- Solución de Ecuaciones Diferenciales en MapleDocument4 pagesSolución de Ecuaciones Diferenciales en MapleJorge LaraPas encore d'évaluation
- Clasificacion Topologica de Los Sistemas Lineales BidimensionalesDocument9 pagesClasificacion Topologica de Los Sistemas Lineales BidimensionalesLuchoPas encore d'évaluation
- Ecuaciones Diferencial Trabajo2Document104 pagesEcuaciones Diferencial Trabajo2Marco100% (1)
- Algebra Lineal I-2013Document187 pagesAlgebra Lineal I-2013pasttulin100% (1)
- Formulario Ecuaciones DiferencialesDocument14 pagesFormulario Ecuaciones Diferencialesramm_ÁlvarezPas encore d'évaluation
- Tabla de Ecuaciones Diferenciales OrdinariasDocument6 pagesTabla de Ecuaciones Diferenciales OrdinariasGabriel De AbreuPas encore d'évaluation
- Sucesiones CuadráticasDocument2 pagesSucesiones CuadráticasMicaela Zapata MataPas encore d'évaluation
- Examen Matematica 1 Ing. Ambiental UniDocument7 pagesExamen Matematica 1 Ing. Ambiental UniManuel Quiñines SanchezPas encore d'évaluation
- Compendio Cb-142 Iipc 2016-IDocument13 pagesCompendio Cb-142 Iipc 2016-IGONZALOMOISES1GMAIL100% (1)
- Transformada de FourierDocument82 pagesTransformada de FourierJosePas encore d'évaluation
- Ecuaciones Diferenciales 2 OrdenDocument29 pagesEcuaciones Diferenciales 2 Ordennike sangPas encore d'évaluation
- Tarea 7Document6 pagesTarea 7Ricardo AlejosPas encore d'évaluation
- Ejercicios Primer ParcialDocument51 pagesEjercicios Primer ParcialErickSimonPas encore d'évaluation
- Secc 6.3, Funciones EspecialesDocument37 pagesSecc 6.3, Funciones Especialesjose2182Pas encore d'évaluation
- 4.sistemas de Ecuaciones Lineales Con MathematicaDocument5 pages4.sistemas de Ecuaciones Lineales Con MathematicadanielPas encore d'évaluation
- Elementos Basicos de MATLABDocument76 pagesElementos Basicos de MATLABYvern TovarPas encore d'évaluation
- Unidad 3. Ecuaciones Diferenciales Lineales de Orden Superior PDFDocument26 pagesUnidad 3. Ecuaciones Diferenciales Lineales de Orden Superior PDFKevin OvandoPas encore d'évaluation
- Polinomios de LegendreDocument4 pagesPolinomios de LegendreJesusGonzalezNucamendiPas encore d'évaluation
- Ecuaciones cuadráticas y de grado superiorDocument19 pagesEcuaciones cuadráticas y de grado superiorcoversol linaresPas encore d'évaluation
- Variación de Parámetros y Operador AnuladorDocument5 pagesVariación de Parámetros y Operador AnuladorEcuaciones DiferencialesPas encore d'évaluation
- Soluciones en series de potencias de EDO linealesDocument20 pagesSoluciones en series de potencias de EDO linealesGracielaStephanyMatiasPoncePas encore d'évaluation
- Ecuaciones Diferenciales Lineales de Orden SuperiorDocument49 pagesEcuaciones Diferenciales Lineales de Orden SuperiorIvan MundoPas encore d'évaluation
- Capitulo 5 - Derivadas Parciales - Diferenciales IIDocument12 pagesCapitulo 5 - Derivadas Parciales - Diferenciales IIJuan FernandezPas encore d'évaluation
- Estabilidad de LyapunovDocument10 pagesEstabilidad de LyapunovPhoenix AngelPas encore d'évaluation
- Universidad Técnica de Manabí: Taller 3 de Ecuaciones DiferencialesDocument5 pagesUniversidad Técnica de Manabí: Taller 3 de Ecuaciones DiferencialesKathy KellyPas encore d'évaluation
- Examen 3 Ecuaciones Diferenciales Tipo BDocument6 pagesExamen 3 Ecuaciones Diferenciales Tipo BIsaac Gutierrez SykesPas encore d'évaluation
- 3ra UnidadDocument28 pages3ra UnidadLucio SifuentesPas encore d'évaluation
- Ecuaciones Diferenciales Unidad 4Document28 pagesEcuaciones Diferenciales Unidad 4Jason Clemente0% (1)
- Unidad 4 - Sistemas de Acuaciones Diferenciales Lineales PDFDocument22 pagesUnidad 4 - Sistemas de Acuaciones Diferenciales Lineales PDFSelinaPas encore d'évaluation
- Sistemas de Ecuaciones Diferenciales Lineales Parte 1Document6 pagesSistemas de Ecuaciones Diferenciales Lineales Parte 1Michael Martines IzquierdoPas encore d'évaluation
- Tema 7Document21 pagesTema 7Naldo San Agustín de Obispo0% (1)
- Tema 4....Document21 pagesTema 4....fernando k3Pas encore d'évaluation
- PRACTICA INEC LinealDocument1 pagePRACTICA INEC LinealanchrisPas encore d'évaluation
- Rectas en r3Document88 pagesRectas en r3Tomas Cayao FloresPas encore d'évaluation
- Caso01 VentadecomputadorasDocument7 pagesCaso01 VentadecomputadorasanchrisPas encore d'évaluation
- Dinamicas - Primaria 2013Document4 pagesDinamicas - Primaria 2013anchrisPas encore d'évaluation
- ¿Qué Filtros Hay en Un Jetta y Cuándo ReemplazarlosDocument4 pages¿Qué Filtros Hay en Un Jetta y Cuándo ReemplazarlosLaura Rivera EscalantePas encore d'évaluation
- La Iniciacion Deportiva. TrabajoDocument13 pagesLa Iniciacion Deportiva. TrabajoJose MendozaPas encore d'évaluation
- Lectura 10Document3 pagesLectura 10Yakii MendozaPas encore d'évaluation
- Carrera Ingeniería Industrial secuencias cursadoDocument1 pageCarrera Ingeniería Industrial secuencias cursadoDiego SilvaPas encore d'évaluation
- Procesamiento y Formado de Espumas de PolímeroDocument26 pagesProcesamiento y Formado de Espumas de PolímeroAndres Valbuena0% (1)
- Expediente Tecnico AquasystemDocument32 pagesExpediente Tecnico AquasystemArq.proy01 GRUPOLAYPas encore d'évaluation
- Practica Metodo de RichieDocument8 pagesPractica Metodo de RichieIvonne CoyotziPas encore d'évaluation
- Catálogo de partes MasesaDocument72 pagesCatálogo de partes MasesaSegundo ZapataPas encore d'évaluation
- LB 4 - Evaluación Del Matadero Municipal de Tingo María para Implementar POES y BPMDocument5 pagesLB 4 - Evaluación Del Matadero Municipal de Tingo María para Implementar POES y BPMfrpatriciaPas encore d'évaluation
- Apelación contra resolución de exclusión del Monotributo por incumplimiento de parámetrosDocument3 pagesApelación contra resolución de exclusión del Monotributo por incumplimiento de parámetrosmarcosk50% (2)
- Tarea 6.3-Blehideliz FamiliaDocument7 pagesTarea 6.3-Blehideliz FamiliaBlehideliz FamiliaPas encore d'évaluation
- Mito y Verdades de La Violencia de GeneroDocument25 pagesMito y Verdades de La Violencia de GeneroDelina BaldPas encore d'évaluation
- Robert FisherDocument4 pagesRobert FisherLuthierFer VenezuelaPas encore d'évaluation
- Historia de La Farmacia PDFDocument29 pagesHistoria de La Farmacia PDFJhon Brayan Angarita Medina100% (1)
- Libranos Del Maligno - Padre BenitoDocument132 pagesLibranos Del Maligno - Padre BenitoMiaPas encore d'évaluation
- 4 BlumerDocument8 pages4 Blumerdalia gerszunyPas encore d'évaluation
- Semana 01 - Tarea - Practica El Parafraseo - MaterialDocument4 pagesSemana 01 - Tarea - Practica El Parafraseo - MaterialErick MarquinaPas encore d'évaluation
- Habilidades sociales esencialesDocument18 pagesHabilidades sociales esencialesmariacillerPas encore d'évaluation
- Reporte de Laboratorio de Metalografía 1Document11 pagesReporte de Laboratorio de Metalografía 1Eduardo Santos LeónPas encore d'évaluation
- Reporte de Pps Pisis Marzo 2020Document27 pagesReporte de Pps Pisis Marzo 2020Lina María EstradaPas encore d'évaluation
- Introducción A Los Sistemas - Segundo ParcialDocument3 pagesIntroducción A Los Sistemas - Segundo ParcialLeonidas RosesPas encore d'évaluation
- Planta Procesadora de CitricosDocument124 pagesPlanta Procesadora de CitricosGabriel Martinez100% (1)
- Catálogo tuberías mangueras industriales PVC HDPEDocument19 pagesCatálogo tuberías mangueras industriales PVC HDPEAgustin Acuña RodriguezPas encore d'évaluation
- S13. s2 - El Artículo de Opinión PDFDocument16 pagesS13. s2 - El Artículo de Opinión PDFLucero LuPas encore d'évaluation
- Mapa Conceptual VPH FinalDocument1 pageMapa Conceptual VPH FinalMariaTrujilloPedroza100% (3)
- INGENIERÍA CIVIL - ROL - EXAMENES - PARCIALES - 2023-II - WDocument8 pagesINGENIERÍA CIVIL - ROL - EXAMENES - PARCIALES - 2023-II - WGiovanny ArósteguiPas encore d'évaluation
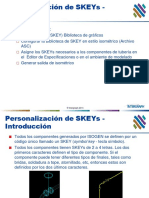
- Simbolos Personalizados y SoportesDocument18 pagesSimbolos Personalizados y Soporteskakoso74Pas encore d'évaluation
- Runas Vikingas 3Document9 pagesRunas Vikingas 3GusPas encore d'évaluation
- AlgebraDocument3 pagesAlgebraAlexita LopezPas encore d'évaluation
- Norma Iso 9000-2015 Fundamentos y VocabularioDocument34 pagesNorma Iso 9000-2015 Fundamentos y VocabularioLuis Carlos Mota Zapata100% (1)