Vous aimerez peut-être aussi
- Synchronisation HardwareDocument17 pagesSynchronisation HardwareTarun100% (4)
- Operating System Short Questions and AnswersDocument62 pagesOperating System Short Questions and Answerscontactmenoop40% (5)
- Process Management, Threads, Process Scheduling - Operating SystemsDocument21 pagesProcess Management, Threads, Process Scheduling - Operating SystemsMukesh50% (2)
- Operating Systems - DeadlocksDocument14 pagesOperating Systems - DeadlocksMukesh100% (3)
- Memory Management Processor Management Device Management File Management SecurityDocument47 pagesMemory Management Processor Management Device Management File Management Securityyashika sarodePas encore d'évaluation
- Course Notes-Unit 5Document37 pagesCourse Notes-Unit 5Safa M0% (1)
- Operating System TutorialDocument64 pagesOperating System TutorialSuraj RamolaPas encore d'évaluation
- CS 551: Banker's AlgorithmDocument4 pagesCS 551: Banker's AlgorithmsgdhruvPas encore d'évaluation
- Os 101 NotesDocument102 pagesOs 101 Notesvg0Pas encore d'évaluation
- Round Robin Algorithm With ExamplesDocument6 pagesRound Robin Algorithm With ExamplesSikandar Javid100% (1)
- Unit 1 CN MCQDocument5 pagesUnit 1 CN MCQSanskar PawarPas encore d'évaluation
- Chapter 2 - Communication: Distributed Systems (IT 441)Document59 pagesChapter 2 - Communication: Distributed Systems (IT 441)hiwot kebedePas encore d'évaluation
- Process Scheduling ReportDocument6 pagesProcess Scheduling ReportDevang KhandelwalPas encore d'évaluation
- Operating System NotesDocument168 pagesOperating System Notesishahma100% (1)
- Input/ Output Organization: Accessing I/O DevicesDocument12 pagesInput/ Output Organization: Accessing I/O DevicesGahan A V Gowda100% (1)
- Artificial Intelligence Unit-4 First Order LogicDocument11 pagesArtificial Intelligence Unit-4 First Order LogicMukesh100% (2)
- Cs9251 Mobile Computing 2marks 16marks Question PapersDocument11 pagesCs9251 Mobile Computing 2marks 16marks Question PapersValar MathiPas encore d'évaluation
- Static and Dynamic Channel AllocationDocument6 pagesStatic and Dynamic Channel AllocationGauriPas encore d'évaluation
- CS1253 2,16marksDocument24 pagesCS1253 2,16marksRevathi RevaPas encore d'évaluation
- Operating System NotesDocument63 pagesOperating System NotesmogirejudPas encore d'évaluation
- Theory of ComputationDocument24 pagesTheory of Computationsaranjsp67% (3)
- Case Studies in CDocument7 pagesCase Studies in CVivek Vardhan ReddyPas encore d'évaluation
- Operating System Concepts TestDocument11 pagesOperating System Concepts TestXuong RongPas encore d'évaluation
- Os Process SchedulingDocument4 pagesOs Process SchedulingkiranmaiPas encore d'évaluation
- Artificial Intelligence Question BankDocument8 pagesArtificial Intelligence Question BankAnonymous EImkf6RGdQ100% (2)
- Unit 1 Question and AnswerDocument5 pagesUnit 1 Question and AnswerSangam Maurya100% (1)
- 2mark and 16 OperatingSystemsDocument24 pages2mark and 16 OperatingSystemsDhanusha Chandrasegar SabarinathPas encore d'évaluation
- Introduction To Python Programming: Text Book: Core Python Programming, Wesley J. Chun, Second Edition, PearsonDocument28 pagesIntroduction To Python Programming: Text Book: Core Python Programming, Wesley J. Chun, Second Edition, Pearsonvikhyath ReddyPas encore d'évaluation
- Unit 1 - Analysis and Design of Algorithm - WWW - Rgpvnotes.inDocument19 pagesUnit 1 - Analysis and Design of Algorithm - WWW - Rgpvnotes.inRashi ShrivastavaPas encore d'évaluation
- Pipelining in Computer ArchitectureDocument46 pagesPipelining in Computer ArchitectureMag CreationPas encore d'évaluation
- ThreadsDocument47 pagesThreads21PC12 - GOKUL DPas encore d'évaluation
- Operating System OS Compiled Notes 06CS53Document160 pagesOperating System OS Compiled Notes 06CS53Srinath Gm G MPas encore d'évaluation
- Chapter 1 - Fundamentals of Computer DesignDocument40 pagesChapter 1 - Fundamentals of Computer Designarchumeenabalu100% (1)
- Architecture and Computer Organization Part 13.3 Virtual MemoryDocument9 pagesArchitecture and Computer Organization Part 13.3 Virtual MemoryAnthony van IngePas encore d'évaluation
- HPC MCQDocument3 pagesHPC MCQJayaprabha KansePas encore d'évaluation
- Divide and ConquerDocument50 pagesDivide and Conquerjoe learioPas encore d'évaluation
- B.tech CS S8 High Performance Computing Module Notes Module 1Document19 pagesB.tech CS S8 High Performance Computing Module Notes Module 1Jisha Shaji100% (1)
- DCN-unit-1 ModifiedDocument112 pagesDCN-unit-1 ModifiedMayank KumarPas encore d'évaluation
- Operating SystemDocument35 pagesOperating SystemVasudevPas encore d'évaluation
- ModelsDocument17 pagesModelsameet_ngangomPas encore d'évaluation
- Operating System 2 Marks and 16 Marks - AnswersDocument45 pagesOperating System 2 Marks and 16 Marks - AnswersDiana Arun75% (4)
- Unit-6 Distributed Shared MemoryDocument71 pagesUnit-6 Distributed Shared Memorydeepak2083Pas encore d'évaluation
- Computer Networks - Physical LayerDocument40 pagesComputer Networks - Physical LayerChandana PamidimukkalaPas encore d'évaluation
- Advanced Database Systems Transactions Processing: What Is A Transaction?Document102 pagesAdvanced Database Systems Transactions Processing: What Is A Transaction?ephrem mollaPas encore d'évaluation
- Theoretical Concept of Unix Operating SystemDocument10 pagesTheoretical Concept of Unix Operating SystemManish Yadav100% (1)
- Important Questions Computer Networks: Question BankDocument2 pagesImportant Questions Computer Networks: Question Bankvenkiscribd444Pas encore d'évaluation
- ANNAUNIVERSITY OPERATING SYSTEM Unit 1Document89 pagesANNAUNIVERSITY OPERATING SYSTEM Unit 1studentscorners100% (1)
- OS Multiple Choice QuestionsDocument6 pagesOS Multiple Choice QuestionsSheena MohammedPas encore d'évaluation
- 2 Event Driven ProgrammingDocument28 pages2 Event Driven ProgrammingmussdimbPas encore d'évaluation
- JAVA: MCQ. These Are Sample MCQ Questions. Just For Practice. Option A/1 Option B/2 Option C/3 Option D/4 AnswerDocument4 pagesJAVA: MCQ. These Are Sample MCQ Questions. Just For Practice. Option A/1 Option B/2 Option C/3 Option D/4 AnswerDevanand YadavPas encore d'évaluation
- Os El 2019103555 Hardware SyncDocument4 pagesOs El 2019103555 Hardware SyncPranava Raman BMSPas encore d'évaluation
- OS 2nd Assignments AnswersDocument8 pagesOS 2nd Assignments AnswersSai Kishan .sPas encore d'évaluation
- Mod 3Document12 pagesMod 3Atul DrawsPas encore d'évaluation
- Inter-Process CommunicationDocument7 pagesInter-Process CommunicationAniket kumarPas encore d'évaluation
- Process Synchronization NotesDocument24 pagesProcess Synchronization Notesbalasubrahmanya23Pas encore d'évaluation
- Unit2 (A) - Final - Process SynchronizationDocument12 pagesUnit2 (A) - Final - Process SynchronizationSREESAIARJUN KOSINEPALLIPas encore d'évaluation
- OS Notes Module 3 4Document49 pagesOS Notes Module 3 4Huzaifa AnjumPas encore d'évaluation
- Unit 2Document19 pagesUnit 2ONLINE hapurPas encore d'évaluation
- CSt206-OS-module 3 - Part1Document14 pagesCSt206-OS-module 3 - Part1Faris BashaPas encore d'évaluation
- OS Lecture 5Document10 pagesOS Lecture 5nkg0603Pas encore d'évaluation
- Cisco Introduction To Cyber Security Chap-4Document9 pagesCisco Introduction To Cyber Security Chap-4MukeshPas encore d'évaluation
- Protocols and Reference Models - CCNAv7-1Document41 pagesProtocols and Reference Models - CCNAv7-1MukeshPas encore d'évaluation
- Deadlocks in Operating SystemsDocument37 pagesDeadlocks in Operating SystemsMukeshPas encore d'évaluation
- Introduction To Networks - CCNAv7 Module-1Document42 pagesIntroduction To Networks - CCNAv7 Module-1Mukesh0% (1)
- Cisco Introduction To Cyber Security Chap-1Document9 pagesCisco Introduction To Cyber Security Chap-1Mukesh80% (5)
- Basic Router and Switch Configuration - CCNAv7 Module 2Document36 pagesBasic Router and Switch Configuration - CCNAv7 Module 2MukeshPas encore d'évaluation
- Unicast Routing Protocols - RIP, OSPF and BGPDocument48 pagesUnicast Routing Protocols - RIP, OSPF and BGPMukesh100% (1)
- Quality of ServiceDocument40 pagesQuality of ServiceMukeshPas encore d'évaluation
- Cisco Introduction To Cyber Security Chap-2Document9 pagesCisco Introduction To Cyber Security Chap-2MukeshPas encore d'évaluation
- Next Generation IP - IPv6Document46 pagesNext Generation IP - IPv6Mukesh100% (1)
- Transport Layer - MukeshDocument54 pagesTransport Layer - MukeshMukeshPas encore d'évaluation
- MVC & Struts NotesDocument6 pagesMVC & Struts NotesMukesh100% (1)
- Multimedia Data and ProtocolsDocument59 pagesMultimedia Data and ProtocolsMukesh100% (1)
- Multicasting and Multicast ProtocolsDocument50 pagesMulticasting and Multicast ProtocolsMukeshPas encore d'évaluation
- Trusted Systems, Firewalls, Intrusion Detection SystemsDocument18 pagesTrusted Systems, Firewalls, Intrusion Detection SystemsMukesh100% (34)
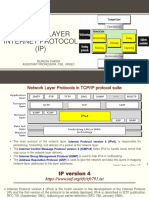
- Network Layer - IP - MukeshDocument19 pagesNetwork Layer - IP - MukeshMukesh100% (2)
- Unicast Routing - MukeshDocument29 pagesUnicast Routing - MukeshMukeshPas encore d'évaluation
- Bluetooth, IEEE 802.11, WIMAXDocument30 pagesBluetooth, IEEE 802.11, WIMAXMukesh71% (7)
- Introduction To Networks, Reference ModelsDocument38 pagesIntroduction To Networks, Reference ModelsMukesh100% (2)
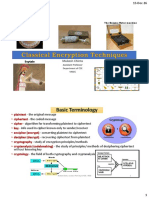
- Classsical Encryption Techniques MukeshDocument13 pagesClasssical Encryption Techniques MukeshMukeshPas encore d'évaluation
- Symmetric Encryption, DES, AES, MAC, Hash Algorithms, HMACDocument76 pagesSymmetric Encryption, DES, AES, MAC, Hash Algorithms, HMACMukesh86% (7)
- Operating Systems: Files Concept & Implementing File SystemsDocument27 pagesOperating Systems: Files Concept & Implementing File SystemsMukesh88% (48)
- Assymetric Cryptography, Kerberos, X.509 CertificatesDocument34 pagesAssymetric Cryptography, Kerberos, X.509 CertificatesMukesh80% (5)
- Introduction To SecurityDocument37 pagesIntroduction To SecurityMukeshPas encore d'évaluation
- Database Issues in Mobile ComputingDocument20 pagesDatabase Issues in Mobile ComputingMukesh90% (51)
- MC (Unit-7) MANET'sDocument23 pagesMC (Unit-7) MANET'sMukesh93% (42)
- Servlets NotesDocument18 pagesServlets NotesMukesh100% (8)
- JSP NotesDocument35 pagesJSP NotesMukesh71% (14)
- ReadmeDocument2 pagesReadmeTiến LộcPas encore d'évaluation
- Java Swing ExampleDocument4 pagesJava Swing Example0107248Pas encore d'évaluation
- Chapter 2 OS by GagneDocument12 pagesChapter 2 OS by GagneKing BoiPas encore d'évaluation
- Code Injection Series Part1Document18 pagesCode Injection Series Part1Tài phùngPas encore d'évaluation
- Some Useful CommandDocument9 pagesSome Useful CommandKRUPA MQPas encore d'évaluation
- Pcomm32Pro: Software Reference ManualDocument109 pagesPcomm32Pro: Software Reference ManualqwerPas encore d'évaluation
- SMT and CMP ArchitecturesDocument19 pagesSMT and CMP Architecturesi_2loveu3235100% (3)
- Lab Manual Laboratory Practice-I: (System Programming & Operating System)Document35 pagesLab Manual Laboratory Practice-I: (System Programming & Operating System)prafulla100% (2)
- How To Mount Software RAID1 Member Using MdadmDocument4 pagesHow To Mount Software RAID1 Member Using Mdadmjaleelh9898Pas encore d'évaluation
- Upgrade Software BTS NokiaDocument93 pagesUpgrade Software BTS NokiaXavier MazivilaPas encore d'évaluation
- Unit 4 DBMS Pre ReadingDocument8 pagesUnit 4 DBMS Pre ReadingAbhishek abhishekPas encore d'évaluation
- Inter Process CommunicationDocument6 pagesInter Process Communicationnameera0987654321Pas encore d'évaluation
- Oracle ASM Vs HP UX LVM DusanBaljevic Sep2009Document50 pagesOracle ASM Vs HP UX LVM DusanBaljevic Sep2009cooljai619100% (1)
- Create Virtual SCSI Adapter - 2Document12 pagesCreate Virtual SCSI Adapter - 2Senthil GaneshPas encore d'évaluation
- MkUSB Quick Start Manual 1Document30 pagesMkUSB Quick Start Manual 1fibbo2012Pas encore d'évaluation
- About Histogram, Servercreditcard and Extremely Cloudy0rdinaryDocument4 198 pagesAbout Histogram, Servercreditcard and Extremely Cloudy0rdinaryPriscilla Felicia HarmanusPas encore d'évaluation
- Eaton'S Cooper Power Series Form 6 Recloser Control Proview 5.1 Software InformationDocument6 pagesEaton'S Cooper Power Series Form 6 Recloser Control Proview 5.1 Software InformationJefferson Mosquera PerezPas encore d'évaluation
- Install Uchk2Document2 pagesInstall Uchk2sutedjo partoPas encore d'évaluation
- Taming The Daemon: Writing Cross-Platform Service Applications in FPC/LazarusDocument10 pagesTaming The Daemon: Writing Cross-Platform Service Applications in FPC/Lazarusnoel799Pas encore d'évaluation
- CNAi Import Export InstructionsDocument12 pagesCNAi Import Export InstructionsSokratesPas encore d'évaluation
- HPE PrimeraDocument13 pagesHPE PrimeraHai LangPas encore d'évaluation
- Using Fastcgi To Host PHP Applications On Iis 7Document24 pagesUsing Fastcgi To Host PHP Applications On Iis 7sebacruzarPas encore d'évaluation
- Registry and G Policy MapDocument26 pagesRegistry and G Policy MaposuwiraPas encore d'évaluation
- ABR11 Battle Card - Symantec Backup Exec 2012Document2 pagesABR11 Battle Card - Symantec Backup Exec 2012vinay_mdrPas encore d'évaluation
- ADB Shell Commands ListDocument9 pagesADB Shell Commands ListManojVaishnavPas encore d'évaluation
- Chapter 7Document24 pagesChapter 7ravi100% (1)
- Issue 1 MMNR Short DumpDocument6 pagesIssue 1 MMNR Short DumppookusmasPas encore d'évaluation
- Lab Sheet5Document9 pagesLab Sheet5vishnu kesavPas encore d'évaluation
- SLConsole Release Notes FRS 6.65Document6 pagesSLConsole Release Notes FRS 6.65lucasPas encore d'évaluation
- C# - Creating A Service To Monitor A DirectoryDocument6 pagesC# - Creating A Service To Monitor A DirectoryMiguel Ángel Macías MartínezPas encore d'évaluation