Vous aimerez peut-être aussi
- Edited 2 MarksDocument24 pagesEdited 2 MarksMohamed RiasPas encore d'évaluation
- Space Switching & Time SwitchingDocument21 pagesSpace Switching & Time SwitchingHassaan KhanPas encore d'évaluation
- EEE 441 Lecture3 (Switching System)Document60 pagesEEE 441 Lecture3 (Switching System)JAWWAD SADIQ AYON100% (2)
- Multiplexing and DemultiplexingDocument10 pagesMultiplexing and DemultiplexingCharming buddyPas encore d'évaluation
- Chapter 1 - Introduction To The Telephone NetworkDocument9 pagesChapter 1 - Introduction To The Telephone NetworkPoit X Nincompoops100% (1)
- SSMT Solution ManualDocument12 pagesSSMT Solution ManualPraahas Amin0% (1)
- Public Switched Telephone Network (PSTN) : Voice and Data Delivery NetworksDocument180 pagesPublic Switched Telephone Network (PSTN) : Voice and Data Delivery NetworksAlas Mallari DonatoPas encore d'évaluation
- Multiple Choice Questions - Wireless CommunicationDocument3 pagesMultiple Choice Questions - Wireless CommunicationEdwin Quinlat DevizaPas encore d'évaluation
- Telecommunication Switching System Control of Switching System PDFDocument19 pagesTelecommunication Switching System Control of Switching System PDFUdhay Prakash100% (1)
- Introduction To Communication SystemsDocument19 pagesIntroduction To Communication SystemsSolomon Tadesse AthlawPas encore d'évaluation
- Principle of Electronic ChangeDocument10 pagesPrinciple of Electronic Changeveeru_virender100% (2)
- Digital Modulation TechniquesDocument14 pagesDigital Modulation TechniquesbrajeshPas encore d'évaluation
- Chapter Five: Topics Discussed in This SectionDocument39 pagesChapter Five: Topics Discussed in This SectionSolomon Tadesse AthlawPas encore d'évaluation
- Unit 4 Satellite AccessDocument23 pagesUnit 4 Satellite AccessSoundararajan RajagopalanPas encore d'évaluation
- Communication InterfaceDocument45 pagesCommunication Interfaceprabhabathi devi100% (1)
- Amplitude ModulationDocument12 pagesAmplitude ModulationamrilsiregarPas encore d'évaluation
- Notes Lecture7 GSMDocument32 pagesNotes Lecture7 GSMAkhil DasPas encore d'évaluation
- TSSN Material Q&AnsDocument103 pagesTSSN Material Q&AnstwilightrenesmeePas encore d'évaluation
- Linear Convolution Vs Circular Convolution in The DFTDocument4 pagesLinear Convolution Vs Circular Convolution in The DFTa_alok25100% (1)
- UNIT-one-IT2402-MOBILE COMMUNICATION Unit 1 2 MarksDocument6 pagesUNIT-one-IT2402-MOBILE COMMUNICATION Unit 1 2 Marksdatatycoon100% (1)
- FDMADocument66 pagesFDMApoojapriya204100% (2)
- Switching Networks: Single Stage NetworkDocument67 pagesSwitching Networks: Single Stage NetworkEngr Sajid Mahmood RizviPas encore d'évaluation
- Pulse Code ModulationDocument11 pagesPulse Code ModulationMaryam ShahPas encore d'évaluation
- 4) Frequency and Phase ModulationDocument13 pages4) Frequency and Phase ModulationAditya PaulPas encore d'évaluation
- Analog Modulation TechniquesDocument66 pagesAnalog Modulation Techniquespawan33% (3)
- Solutions To Analytical Problems: Chapter 6 Frequency Management and Channel AssignmentDocument14 pagesSolutions To Analytical Problems: Chapter 6 Frequency Management and Channel AssignmentchandanaPas encore d'évaluation
- Digital Communication - Mr. Sriram - Mrs.a.vinnarasi NEWDocument7 pagesDigital Communication - Mr. Sriram - Mrs.a.vinnarasi NEWPriya DarshuPas encore d'évaluation
- Mwe CF PDFDocument67 pagesMwe CF PDFSailesh HanumanthulaPas encore d'évaluation
- Pulse ModulationDocument55 pagesPulse ModulationMuhammad Aiman AmranPas encore d'évaluation
- LAb 1Document8 pagesLAb 1nazmyPas encore d'évaluation
- Chapter 4 Digital Mod - Part 1Document47 pagesChapter 4 Digital Mod - Part 1posktovaPas encore d'évaluation
- Analog Communication Unit2 VtuDocument76 pagesAnalog Communication Unit2 Vturaghudathesh100% (2)
- GSM Chap1 - 8th ECE - VTU - GSM Architectrue and Interfaces2-RamisuniverseDocument15 pagesGSM Chap1 - 8th ECE - VTU - GSM Architectrue and Interfaces2-Ramisuniverseramisuniverse2100% (1)
- Detection of Radar Signals in Noise: Unit - 5Document60 pagesDetection of Radar Signals in Noise: Unit - 5Gajula SureshPas encore d'évaluation
- Analog To Digital ConverterDocument7 pagesAnalog To Digital ConverterRavi Patel100% (1)
- Ec7101-Telecommunication Switching Circuits & NetworksDocument8 pagesEc7101-Telecommunication Switching Circuits & NetworksAbhijeet BishtPas encore d'évaluation
- T&SS Lecture-3Document29 pagesT&SS Lecture-3sarim imranPas encore d'évaluation
- EC8501 Digital Communication MCQ PadeepzDocument40 pagesEC8501 Digital Communication MCQ PadeepzNivetha100% (1)
- Unit 3 - 15EC409Document130 pagesUnit 3 - 15EC409Akash ChauhanPas encore d'évaluation
- Communication Engineering Unit 1 Lecture 1Document22 pagesCommunication Engineering Unit 1 Lecture 1Deepak SinghPas encore d'évaluation
- Chapter 3 Angle Modulation FinalDocument51 pagesChapter 3 Angle Modulation Finalshiwangizaw tikaboPas encore d'évaluation
- Chapter 2 - Digital Switching Systems (EEEg8254)Document58 pagesChapter 2 - Digital Switching Systems (EEEg8254)Barnabas Fantahun100% (1)
- Chapter 2: Optical Transmitter and ReceiverDocument72 pagesChapter 2: Optical Transmitter and ReceiverYosef KirosPas encore d'évaluation
- MSK ModulationDocument31 pagesMSK Modulationnassr_ismailPas encore d'évaluation
- Chapter 3Document52 pagesChapter 3ናዝራዊ አማኑኤል ጌታቸው0% (1)
- 2 PSTN PDFDocument38 pages2 PSTN PDFRamyAyashPas encore d'évaluation
- EC8561 COMMUNICATION SYSTEMS LabDocument1 pageEC8561 COMMUNICATION SYSTEMS Labvanithapremkumar50% (2)
- 4 Pulse Code Modulation (PCM)Document45 pages4 Pulse Code Modulation (PCM)Kunal KatariyaPas encore d'évaluation
- BSNLDocument26 pagesBSNLRaj KumarPas encore d'évaluation
- Digital Communication Line Codes PDFDocument7 pagesDigital Communication Line Codes PDFAzImmPas encore d'évaluation
- Digital CommunicationMCQDocument3 pagesDigital CommunicationMCQZahid Yousuf0% (1)
- Circuit and Packet SwitchingDocument27 pagesCircuit and Packet Switchingdevbrat anandPas encore d'évaluation
- DEC LAB 06 (Design of A Digital To Analog Converter)Document9 pagesDEC LAB 06 (Design of A Digital To Analog Converter)anon_776365175Pas encore d'évaluation
- Communication TheoryDocument156 pagesCommunication TheoryMuumini De Souza NezzaPas encore d'évaluation
- Signaling in Telecommunication NetworksD'EverandSignaling in Telecommunication NetworksÉvaluation : 4 sur 5 étoiles4/5 (1)
- Teknik Penyambungan - (Evolusi Sistem Switching)Document93 pagesTeknik Penyambungan - (Evolusi Sistem Switching)Endro Teguh PratamaPas encore d'évaluation
- Crossbar SwitchingDocument18 pagesCrossbar SwitchingEngr Nuzhat Lashari100% (3)
- Space Division SwitchingDocument18 pagesSpace Division SwitchingKavitha A K100% (1)
- Chapter 3 TransistorsDocument17 pagesChapter 3 TransistorsFikri RahimPas encore d'évaluation
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1D'EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Évaluation : 2.5 sur 5 étoiles2.5/5 (3)
- Handout 7: Phase and Frequency ModulationDocument7 pagesHandout 7: Phase and Frequency ModulationRajurajiPas encore d'évaluation
- Frequency ModulationDocument135 pagesFrequency ModulationRajuraji100% (1)
- ISDN BasicsDocument112 pagesISDN BasicsRajurajiPas encore d'évaluation
- SPC Telephone ExchangeDocument22 pagesSPC Telephone ExchangeRajurajiPas encore d'évaluation
- IP Addressing: Introductory MaterialDocument26 pagesIP Addressing: Introductory MaterialRajurajiPas encore d'évaluation
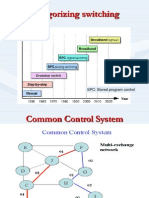
- Categorizing Switching: SPC: Stored Program ControlDocument42 pagesCategorizing Switching: SPC: Stored Program ControlRajurajiPas encore d'évaluation
- Signaling: Module NameDocument37 pagesSignaling: Module NameRajurajiPas encore d'évaluation
- Wind Energy InformationDocument56 pagesWind Energy InformationRajurajiPas encore d'évaluation
- Learning Basics of DecibelsDocument7 pagesLearning Basics of DecibelsRajuraji100% (1)
- History of Telecom & ElectronicsDocument90 pagesHistory of Telecom & ElectronicsRajuraji100% (1)
- Antennas & Propagation Signal Encoding: CSG 250 Spring 2005Document79 pagesAntennas & Propagation Signal Encoding: CSG 250 Spring 2005RajurajiPas encore d'évaluation
- 1662 Operación y Mantenimiento PDFDocument324 pages1662 Operación y Mantenimiento PDFJosé Luis Armando100% (1)
- Datasheet Romantis UHP1000 Satellite Router PDFDocument2 pagesDatasheet Romantis UHP1000 Satellite Router PDFWaldito Febri RamadhanPas encore d'évaluation
- MCQSDocument41 pagesMCQSFahadKhan50% (2)
- EEX4330 - Final Paper2020 - V1Document4 pagesEEX4330 - Final Paper2020 - V1DK White LionPas encore d'évaluation
- BLAKE Summary: 1. It Moves Information From A Source To A Destination Communication SystemDocument59 pagesBLAKE Summary: 1. It Moves Information From A Source To A Destination Communication SystemZesi Villamor Delos SantosPas encore d'évaluation
- Computer Network-1 IA Question BankDocument5 pagesComputer Network-1 IA Question BankVeena GadadPas encore d'évaluation
- Multiple Access Protocol: Presented By, J.Merlin Florrence I M.SCDocument35 pagesMultiple Access Protocol: Presented By, J.Merlin Florrence I M.SCsrivatsa.a.malali srivatsa.a.malaliPas encore d'évaluation
- MW TXN and RTNDocument105 pagesMW TXN and RTNHAWLITUPas encore d'évaluation
- MiTOP-E3 T3 PDFDocument120 pagesMiTOP-E3 T3 PDFcristytrs787878Pas encore d'évaluation
- GATE Communication Systems by KanodiaDocument88 pagesGATE Communication Systems by Kanodiakaran11383% (6)
- Core Network Product OverviewDocument26 pagesCore Network Product Overviewkarun9387Pas encore d'évaluation
- Circuit Switched NetworkDocument6 pagesCircuit Switched NetworkYasin OmaryPas encore d'évaluation
- WDM-DWDM Systems & ComponentsDocument47 pagesWDM-DWDM Systems & Componentsaarthi ravindranPas encore d'évaluation
- ATM - Asynchronous Transfer ModeDocument38 pagesATM - Asynchronous Transfer ModeRaviPas encore d'évaluation
- Cisco IP RAN Optimization SolutionDocument4 pagesCisco IP RAN Optimization SolutionAumpika VitchayapitikulPas encore d'évaluation
- Ipaso100 - 200 - 400 - 1000 - v8.0 - 20110301 To ZteDocument24 pagesIpaso100 - 200 - 400 - 1000 - v8.0 - 20110301 To ZteMuhammad NaeemPas encore d'évaluation
- Alcatel-Lucent 1850 TSS-320: Transport Service SwitchDocument12 pagesAlcatel-Lucent 1850 TSS-320: Transport Service SwitchW@2nPas encore d'évaluation
- "Synchronous Optical Networking": TopicDocument7 pages"Synchronous Optical Networking": TopicHvadann DjessingPas encore d'évaluation
- An Honet - Technical Manual (V7.11) PDFDocument202 pagesAn Honet - Technical Manual (V7.11) PDFtuanvuanh200777Pas encore d'évaluation
- DssDocument2 pagesDssKim JonesPas encore d'évaluation
- Ashutosh Tripathi Training FileDocument56 pagesAshutosh Tripathi Training Filebablujaipal53Pas encore d'évaluation
- Liberty Port-ZTE-ZXCTN-6200 Product Description PDFDocument163 pagesLiberty Port-ZTE-ZXCTN-6200 Product Description PDFkank riyan67% (3)
- Types and Functions of RF MultiplexerDocument10 pagesTypes and Functions of RF MultiplexerjackPas encore d'évaluation
- UTStarcom NetRing TN705 2028Document2 pagesUTStarcom NetRing TN705 2028smithm007100% (1)
- VR New FucntionsDocument35 pagesVR New FucntionsHogr Rgoh100% (2)
- Osi ModelDocument94 pagesOsi Modelsumit_12100% (1)
- Manual KilomuxDocument252 pagesManual Kilomuxberry_pl100% (1)
- 1 - TDM & FDMDocument22 pages1 - TDM & FDMMohamed AliPas encore d'évaluation
- SHLR Product DescriptionDocument48 pagesSHLR Product DescriptionVoravit Satitviriyakul100% (1)
- OTN and ASON Fundamentals TrainingDocument148 pagesOTN and ASON Fundamentals Traininghas samPas encore d'évaluation