Vous aimerez peut-être aussi
- Đề thi ĐH 2016 môn tiếng AnhDocument6 pagesĐề thi ĐH 2016 môn tiếng Anhanh_em5503Pas encore d'évaluation
- Set OperationsDocument4 pagesSet Operationsanh_em5503Pas encore d'évaluation
- Robust Control: Steven - Ding@uni-Due - de Robust Control (V-WS 09/10)Document14 pagesRobust Control: Steven - Ding@uni-Due - de Robust Control (V-WS 09/10)anh_em5503Pas encore d'évaluation
- AUN/SEED-Net Doctoral Program in Japan 2016Document16 pagesAUN/SEED-Net Doctoral Program in Japan 2016LuthfieSangKaptenPas encore d'évaluation
- CD 4026 BDocument15 pagesCD 4026 Bbeta2009Pas encore d'évaluation
- IJCAS - v6 - n4 - pp.477-487 Brush Less DC MotorDocument11 pagesIJCAS - v6 - n4 - pp.477-487 Brush Less DC MotormohankumaaPas encore d'évaluation
- IR LED High PowerDocument8 pagesIR LED High PowerAdithya SeshanPas encore d'évaluation
- Conductivity AlDocument7 pagesConductivity AljorgernrPas encore d'évaluation
- Adaptive Fuzzy Filtering in A Deterministic SettingDocument14 pagesAdaptive Fuzzy Filtering in A Deterministic Settinganh_em5503Pas encore d'évaluation
- B8 BDocument8 pagesB8 Banh_em5503Pas encore d'évaluation
- 67i9-Control of DC CapacitorDocument13 pages67i9-Control of DC CapacitorIJAET JournalPas encore d'évaluation
- Functional Problems 2009Document11 pagesFunctional Problems 2009anh_em5503Pas encore d'évaluation
- Features Description: CMOS Programmable Peripheral InterfaceDocument26 pagesFeatures Description: CMOS Programmable Peripheral Interfaceanh_em5503Pas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Experiment 3 (A) : Cc205 Lab Mechanic of StructuresDocument5 pagesExperiment 3 (A) : Cc205 Lab Mechanic of StructuresZol HasPas encore d'évaluation
- Structural Control System for Water TankDocument4 pagesStructural Control System for Water TankJOSMRIVERCPas encore d'évaluation
- 03-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Adv - 2017 - P1 - GTA-13 - P-I - QPDocument19 pages03-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Adv - 2017 - P1 - GTA-13 - P-I - QPsaloni guptaPas encore d'évaluation
- Resonance - Wikipedia, The Free EncyclopediaDocument10 pagesResonance - Wikipedia, The Free Encyclopedialoke06235Pas encore d'évaluation
- Partial Differential Equations Muzammil Tanveer PDFDocument173 pagesPartial Differential Equations Muzammil Tanveer PDFM Irfan IqbalPas encore d'évaluation
- 39 Space Air DistributionDocument25 pages39 Space Air DistributionPRASAD326100% (3)
- Mechanical VibrationsDocument435 pagesMechanical VibrationsUtkarsh Mishra100% (2)
- Course Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24Document27 pagesCourse Structure and Detailed Syllabus For 1st Year B.tech Admission Batch 2023-24nabajyotimajhi2000Pas encore d'évaluation
- Curtain Wall Calculation PDFDocument134 pagesCurtain Wall Calculation PDFAlaaBadwy100% (1)
- Review Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sDocument8 pagesReview Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sMohamedPas encore d'évaluation
- CK Osborne Reynolds PDFDocument4 pagesCK Osborne Reynolds PDFChaminduKrishanRupasinghePas encore d'évaluation
- Understanding the Mole ConceptDocument23 pagesUnderstanding the Mole ConceptMuyatwa LiksPas encore d'évaluation
- HW3 - Solutions (Sec 21)Document3 pagesHW3 - Solutions (Sec 21)Joichiro NishiPas encore d'évaluation
- Low Angle XRDDocument11 pagesLow Angle XRDKoushik PonnuruPas encore d'évaluation
- Wiles1994 - in Situ Stress Determination Using The Under-Excavation Technique - I. TheoryDocument8 pagesWiles1994 - in Situ Stress Determination Using The Under-Excavation Technique - I. TheoryRisantoPas encore d'évaluation
- ANNA UNIVERSITY MECHANICAL ENGINEERING SIMULATION LAB EXAMDocument5 pagesANNA UNIVERSITY MECHANICAL ENGINEERING SIMULATION LAB EXAMAsst.Prof MECH100% (1)
- Sae Technical Paper Series: Tankut Acarman and Umit OzgunerDocument9 pagesSae Technical Paper Series: Tankut Acarman and Umit OzgunerLeonel Bejar VelardePas encore d'évaluation
- Column Design Prokon.Document16 pagesColumn Design Prokon.akankwasaPas encore d'évaluation
- Energy and Linear and Angular Momenta in Simple Electromagnetic SystemsDocument24 pagesEnergy and Linear and Angular Momenta in Simple Electromagnetic SystemsJennifer RibeiroPas encore d'évaluation
- Evaluation of Dynamic Increment Component of Earth Pressure Behind The Retaining WallsDocument7 pagesEvaluation of Dynamic Increment Component of Earth Pressure Behind The Retaining WallsSivaramakrishnanPas encore d'évaluation
- Sura Publications: Neet Based QuestionsDocument16 pagesSura Publications: Neet Based QuestionsSubash_SaradhaPas encore d'évaluation
- Experimental study of four-point bending test on CLT deep beamsDocument6 pagesExperimental study of four-point bending test on CLT deep beamsFergus GardnerPas encore d'évaluation
- Degree of Freedom PDFDocument13 pagesDegree of Freedom PDFAnasPas encore d'évaluation
- Physics Form 4. Chapter 2. 2.5 ForceDocument49 pagesPhysics Form 4. Chapter 2. 2.5 ForceNuridahBintiZaimi100% (1)
- Unit 2 HydrostaticsDocument17 pagesUnit 2 HydrostaticsRin MoonPas encore d'évaluation
- Bending Deflection - Macaulay Step Functions: AE1108-II: Aerospace Mechanics of MaterialsDocument9 pagesBending Deflection - Macaulay Step Functions: AE1108-II: Aerospace Mechanics of MaterialsAyanwale-cole pelumi AkeemPas encore d'évaluation
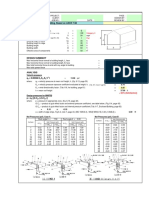
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Document2 pagesWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldPas encore d'évaluation
- Application of Tomography Inversion Methods To Determine The Seismic Wave Velocity Structure (VP, VS, VPVS) of The MEQ Data On ALPHA Geothermal FielDocument5 pagesApplication of Tomography Inversion Methods To Determine The Seismic Wave Velocity Structure (VP, VS, VPVS) of The MEQ Data On ALPHA Geothermal FielWegiDwiSaptoPas encore d'évaluation
- SV Is5Document205 pagesSV Is5weiya100% (1)