Vous aimerez peut-être aussi
- 100 circuitos de shields para arduino (español)D'Everand100 circuitos de shields para arduino (español)Évaluation : 3.5 sur 5 étoiles3.5/5 (3)
- Informe Practica Nro. 02: Manejo de Interrupciones Externas Del Microcontrolador PIC 18F4550Document20 pagesInforme Practica Nro. 02: Manejo de Interrupciones Externas Del Microcontrolador PIC 18F4550Victorino VillamizarPas encore d'évaluation
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosD'EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosÉvaluation : 5 sur 5 étoiles5/5 (5)
- Informe Pulsadores-InterrupcionesDocument13 pagesInforme Pulsadores-InterrupcionesSantiago Morales100% (1)
- Sistemas Embebidos Clase 1Document42 pagesSistemas Embebidos Clase 1Tesla McLovinPas encore d'évaluation
- Tarea2 - Tensiómetro DigitalDocument4 pagesTarea2 - Tensiómetro Digitaljuan manuel barrentoPas encore d'évaluation
- 2 - Ucpic18f2550 2017Document37 pages2 - Ucpic18f2550 2017hipolitoPas encore d'évaluation
- Resumen de Capitulos Modulo 2Document29 pagesResumen de Capitulos Modulo 2Maria Teresa Escobar RamirezPas encore d'évaluation
- Code Fuente - PIC18F4550Document4 pagesCode Fuente - PIC18F4550Frank's Ĵalanok'a Cruz0% (1)
- Diseño Con Pic Cerradura ElectronicaDocument10 pagesDiseño Con Pic Cerradura ElectronicaJuan David Barrera Granados100% (1)
- Instructivo de Configuración RSTPDocument13 pagesInstructivo de Configuración RSTPWillian PalacioPas encore d'évaluation
- Informe Labo2Document26 pagesInforme Labo2carlos levano hernandezPas encore d'évaluation
- Informe Del Laboratorio Calificado 01Document16 pagesInforme Del Laboratorio Calificado 01Daniel Ayala NiñoPas encore d'évaluation
- Distintos Tipos de Convertidores Análogos y DigitalesDocument4 pagesDistintos Tipos de Convertidores Análogos y DigitalesAlber Lim GboPas encore d'évaluation
- ProyectoFinal VLSIDocument7 pagesProyectoFinal VLSIAdrián PilataxiPas encore d'évaluation
- Optimizacion de Cauces FuncionalesDocument79 pagesOptimizacion de Cauces Funcionalescupido0005Pas encore d'évaluation
- Temporizador 22 Pic 16f877aDocument2 pagesTemporizador 22 Pic 16f877ajimmylomanoPas encore d'évaluation
- Tacómetro Con PIC16f84ADocument16 pagesTacómetro Con PIC16f84ALuis ChicañaPas encore d'évaluation
- Rectificadores Con DiodosDocument28 pagesRectificadores Con DiodosIori YagamiPas encore d'évaluation
- Arquitectura de Un MicroprocesadorDocument14 pagesArquitectura de Un MicroprocesadorElsy Maely Noriega MoralesPas encore d'évaluation
- Ci MM74C922Document9 pagesCi MM74C922JOSE FRANCIA ZORRILLAPas encore d'évaluation
- Circuito Acondicionador Termocupla KDocument1 pageCircuito Acondicionador Termocupla KMarcelo Moya CajasPas encore d'évaluation
- Laboratorio N°4 - Semáforo Con dsPICDocument3 pagesLaboratorio N°4 - Semáforo Con dsPICjairoPas encore d'évaluation
- Informe Filtro DigitalDocument6 pagesInforme Filtro DigitalAna AlvaradoPas encore d'évaluation
- Clase 5 Set Reset Flancos Not PDFDocument7 pagesClase 5 Set Reset Flancos Not PDFAntonio AntaloPas encore d'évaluation
- Registros de DesplazamientoDocument17 pagesRegistros de DesplazamientoJULIÁN SAÚL DÁVILA REQUE100% (1)
- Lab 4 - ADC-DAC-2018 - 2Document3 pagesLab 4 - ADC-DAC-2018 - 2fieeg4Pas encore d'évaluation
- Proyecto Estabilidad de Sistemas de Potencia IE-624 Grupo #3Document17 pagesProyecto Estabilidad de Sistemas de Potencia IE-624 Grupo #3Timoty AvilaPas encore d'évaluation
- Guía Rápida Del Ensamblador de Los Microprocesadores ATMEL-AVRDocument8 pagesGuía Rápida Del Ensamblador de Los Microprocesadores ATMEL-AVRDavid GuerraPas encore d'évaluation
- Multiplexor Con PIC16F877ADocument7 pagesMultiplexor Con PIC16F877AJoel Caballero Zabaleta100% (1)
- Capitulo 6 - ProblemasDocument6 pagesCapitulo 6 - ProblemasArturo Fidel Flores BellidoPas encore d'évaluation
- 3 Progra Del Microcontrolador en Ensamblador (3) (2792)Document32 pages3 Progra Del Microcontrolador en Ensamblador (3) (2792)Alfredo Pacheco ZapataPas encore d'évaluation
- Implementación y Control de Un Mecanismo de Dos Grados de LibertadDocument6 pagesImplementación y Control de Un Mecanismo de Dos Grados de LibertadISmael MEdina LOpezPas encore d'évaluation
- PIC16F887Document127 pagesPIC16F887Ernesto ArzabalaPas encore d'évaluation
- Automatización Del Sistema Hidropónico Mediante El Uso de IOTDocument2 pagesAutomatización Del Sistema Hidropónico Mediante El Uso de IOTAmilcar Canaza SalasPas encore d'évaluation
- Examen Tercer Corte PLCDocument2 pagesExamen Tercer Corte PLCGerardo A. NavarretePas encore d'évaluation
- Fuentes de InterrupcionDocument4 pagesFuentes de InterrupcionJoel SalahPas encore d'évaluation
- Cerradura Electrónica Codificad1Document6 pagesCerradura Electrónica Codificad1Marlon Glowing SalasPas encore d'évaluation
- Informe Práctica Nro. 4: Diseñar Aplicaciones Con La Interfaz Intercircuito. (I2C)Document22 pagesInforme Práctica Nro. 4: Diseñar Aplicaciones Con La Interfaz Intercircuito. (I2C)Victorino VillamizarPas encore d'évaluation
- AMC2 CP2 (Listo)Document9 pagesAMC2 CP2 (Listo)CarlosAlejandroArroligaAmadorPas encore d'évaluation
- Laboratorio MicroelectronicaDocument2 pagesLaboratorio Microelectronicaageha28Pas encore d'évaluation
- Practica 7 Sist Med Temperatura Comp II pt100Document2 pagesPractica 7 Sist Med Temperatura Comp II pt100Kevin Celis100% (1)
- Análisis Y Diseño Electrónico Basados en El Amplificador OperacionalDocument19 pagesAnálisis Y Diseño Electrónico Basados en El Amplificador OperacionalDIEGO ARMANDO RAMIREZ DIAZPas encore d'évaluation
- Practica 10 - Control Con Perturbacion Externa UNACDocument2 pagesPractica 10 - Control Con Perturbacion Externa UNACMarco SantiagoPas encore d'évaluation
- PulsosDocument14 pagesPulsosGordo XploPas encore d'évaluation
- Laboratorio 2 MicrocontrolDocument3 pagesLaboratorio 2 MicrocontrolDayber CruzPas encore d'évaluation
- td3 PDFDocument226 pagestd3 PDFTecnicasdigitales3 UtnPas encore d'évaluation
- Tutoriale de MikroCDocument11 pagesTutoriale de MikroCAntonio Montalvo DiazPas encore d'évaluation
- Informe 5Document6 pagesInforme 5HECTOR BAYRON PAREDES CAJAMARCAPas encore d'évaluation
- Práctica No. 4 CAD Con RetroalimentacionDocument7 pagesPráctica No. 4 CAD Con RetroalimentacionDaniela OzunaPas encore d'évaluation
- Balotario Capitulo 4 FinalDocument5 pagesBalotario Capitulo 4 FinalVictor UV VelardePas encore d'évaluation
- Troceador AcDocument12 pagesTroceador AcKaren HerreraPas encore d'évaluation
- Paso A Paso Bipolar Conductor Del MotorDocument26 pagesPaso A Paso Bipolar Conductor Del Motorskycoster77Pas encore d'évaluation
- 2012 H Rotativas J Información-General Sandvik PDFDocument20 pages2012 H Rotativas J Información-General Sandvik PDFEdwin RodriguezPas encore d'évaluation
- Interrupción Timer1 AVRDocument7 pagesInterrupción Timer1 AVRJose Antonio Meza ChoquehuaytaPas encore d'évaluation
- Interrupciones en El Pic 18f4550Document29 pagesInterrupciones en El Pic 18f4550slipkkot100% (1)
- Interrupciones y TemporizadoresDocument38 pagesInterrupciones y TemporizadoresAlberto Hai RePas encore d'évaluation
- 7 Manejo de Interrupciones V21Document25 pages7 Manejo de Interrupciones V21Luis AvilésPas encore d'évaluation
- 7 Manejo de Interrupciones PICDocument25 pages7 Manejo de Interrupciones PICjpazmiño_25100% (2)
- InterruptoresDocument14 pagesInterruptoresJessica De Jesus AlvaradoPas encore d'évaluation
- 1) Telefonía CelularDocument9 pages1) Telefonía CelularSteven StanfordPas encore d'évaluation
- Genero Derechosydeberes PDFDocument3 pagesGenero Derechosydeberes PDFCarlos Pozo ContrerasPas encore d'évaluation
- Generac I On Clave BCPDocument2 pagesGenerac I On Clave BCPGTardePas encore d'évaluation
- Trabajo de Laboratorio 5Document3 pagesTrabajo de Laboratorio 5Carlos Pozo ContrerasPas encore d'évaluation
- Trabajo de Control2Document17 pagesTrabajo de Control2Carlos Pozo ContrerasPas encore d'évaluation
- DFS Manual SDocument34 pagesDFS Manual Smelissa garnica floresPas encore d'évaluation
- 6ta Practica Dirigida 2012-IIDocument4 pages6ta Practica Dirigida 2012-IICarlos Pozo ContrerasPas encore d'évaluation
- 1PC Arquitectura de Computadores II (2012-01)Document6 pages1PC Arquitectura de Computadores II (2012-01)Carlos Pozo ContrerasPas encore d'évaluation
- PC3 Arquitectura de Computadores II (2011-02)Document4 pagesPC3 Arquitectura de Computadores II (2011-02)Carlos Pozo ContrerasPas encore d'évaluation
- ElectroII Problemas ResueltosDocument53 pagesElectroII Problemas ResueltosMiguelAngelJaureguiPas encore d'évaluation
- Informe de Tele # 5Document21 pagesInforme de Tele # 5Carlos Pozo ContrerasPas encore d'évaluation
- 1PC Arquitectura de Computadores II (2012-01)Document6 pages1PC Arquitectura de Computadores II (2012-01)Carlos Pozo ContrerasPas encore d'évaluation
- Dispositivos Lógicos MicroprogramablesDocument50 pagesDispositivos Lógicos MicroprogramablesCarlos Pozo ContrerasPas encore d'évaluation
- EP Arquitectura II (2012-01)Document8 pagesEP Arquitectura II (2012-01)Carlos Pozo ContrerasPas encore d'évaluation
- Laboratorio Nº3 - ArquiDocument7 pagesLaboratorio Nº3 - ArquiCarlos Pozo ContrerasPas encore d'évaluation
- Teoria Semana 9 ViernesDocument15 pagesTeoria Semana 9 ViernesJulio CrPas encore d'évaluation
- Laboratorio Nº2Document6 pagesLaboratorio Nº2Carlos Pozo ContrerasPas encore d'évaluation
- PC3 Arquitectura de Computadores II (2012-01)Document6 pagesPC3 Arquitectura de Computadores II (2012-01)Carlos Pozo ContrerasPas encore d'évaluation
- Teoria Semana 11 Parte 2Document10 pagesTeoria Semana 11 Parte 2Carlos Pozo ContrerasPas encore d'évaluation
- Diapos Arki II Proye DomoticaDocument5 pagesDiapos Arki II Proye DomoticaCarlos Pozo ContrerasPas encore d'évaluation
- LaboratorDocument3 pagesLaboratorCarlos Pozo ContrerasPas encore d'évaluation
- LaboratorDocument3 pagesLaboratorCarlos Pozo ContrerasPas encore d'évaluation
- RFIDDocument11 pagesRFIDCarlos Pozo ContrerasPas encore d'évaluation
- Presentacion PP UARTDocument6 pagesPresentacion PP UARTCarlos Pozo ContrerasPas encore d'évaluation
- Manual de Microcontroladores PICDocument68 pagesManual de Microcontroladores PICabraham-tellez-5555Pas encore d'évaluation
- Diapos Arki II Proye DomoticaDocument5 pagesDiapos Arki II Proye DomoticaCarlos Pozo ContrerasPas encore d'évaluation
- Circuitos Electrónicos IIIDocument22 pagesCircuitos Electrónicos IIICarlos Pozo ContrerasPas encore d'évaluation
- Diapos Arki II Proye DomoticaDocument5 pagesDiapos Arki II Proye DomoticaCarlos Pozo ContrerasPas encore d'évaluation
- Manual de Microcontroladores PICDocument68 pagesManual de Microcontroladores PICabraham-tellez-5555Pas encore d'évaluation
- ContratoDocument2 pagesContratojcmt2kPas encore d'évaluation
- CV Alfonso Díaz CDocument13 pagesCV Alfonso Díaz CAlfonsoDiazCaleroPas encore d'évaluation
- Procedimiento de Sand Blast Y Pintura. 1.-OBJETIVODocument10 pagesProcedimiento de Sand Blast Y Pintura. 1.-OBJETIVOADALBERTOPas encore d'évaluation
- Práctica 4 AmpermetroDocument16 pagesPráctica 4 AmpermetroPaloma NizarindaniPas encore d'évaluation
- Polchile Pa Purpanel IsoDocument2 pagesPolchile Pa Purpanel IsocrisanfernanaPas encore d'évaluation
- Catalogo Accesorios ErgolwedDocument32 pagesCatalogo Accesorios ErgolwedAlejandro Lopez RubioPas encore d'évaluation
- Generador TrifasicoDocument4 pagesGenerador TrifasicoRuben Max PlancartePas encore d'évaluation
- Placa LCP 3.5 para Tibia Distal MedialDocument24 pagesPlaca LCP 3.5 para Tibia Distal MedialWaldo Baldelomar Capobianco0% (1)
- Diseño de VigasDocument14 pagesDiseño de VigasJose ChuquimiaPas encore d'évaluation
- Servicio de Transito AereoDocument107 pagesServicio de Transito Aereomarcos100% (3)
- API 576rp Eaf Inspeccion de Dispositivos de Alivio de PresionDocument46 pagesAPI 576rp Eaf Inspeccion de Dispositivos de Alivio de Presionpatim9071Pas encore d'évaluation
- Mobiliario Urbano SedesolDocument34 pagesMobiliario Urbano SedesolAlfredo TorresPas encore d'évaluation
- Agrimac Motocultor Diesel Catalogo Agria HispaniaDocument12 pagesAgrimac Motocultor Diesel Catalogo Agria HispaniaborioPas encore d'évaluation
- Convertidores CC-CCDocument4 pagesConvertidores CC-CCAlexit EmoxaPas encore d'évaluation
- PRACTICA 2do PARCIALDocument5 pagesPRACTICA 2do PARCIALjuanPas encore d'évaluation
- Temple de Los MaterialesDocument5 pagesTemple de Los MaterialesMONSERRAT100% (1)
- Ficha Tecnica Pletina de CobreDocument2 pagesFicha Tecnica Pletina de Cobrefayber camposPas encore d'évaluation
- Informe Mecanica MaterialesDocument9 pagesInforme Mecanica MaterialesKevin LoraPas encore d'évaluation
- GENER-P-17 Protección Contra Caídas V2 PDFDocument49 pagesGENER-P-17 Protección Contra Caídas V2 PDFJorge AcuñaPas encore d'évaluation
- Sistema de Gestión para La Evaluación y Prevención de Riesgos Laborales en El Sector ConstrucciónDocument668 pagesSistema de Gestión para La Evaluación y Prevención de Riesgos Laborales en El Sector ConstrucciónJames AlexanderPas encore d'évaluation
- Llenadora MultiformatoDocument4 pagesLlenadora MultiformatoJuan Pablo Castro RiveraPas encore d'évaluation
- Red de CorrienteDocument19 pagesRed de CorrienteElvisVasquezGonzalezPas encore d'évaluation
- Estudio de Mecanica de SuelosDocument4 pagesEstudio de Mecanica de SuelosAnthony Vega GuimareyPas encore d'évaluation
- Brochure Gdata Mayor It PDFDocument1 pageBrochure Gdata Mayor It PDFraagcomoPas encore d'évaluation
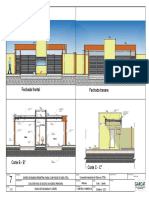
- Fachada Frontal Fachada TraseraDocument1 pageFachada Frontal Fachada TraseraGabriel Rodrigo Cano TapiaPas encore d'évaluation
- Proyecto de Pasaje Final Patasagua AltoDocument106 pagesProyecto de Pasaje Final Patasagua AltoEdson Waly F-lovePas encore d'évaluation
- Especificaciones Tecnicas Poste de MaderaDocument89 pagesEspecificaciones Tecnicas Poste de Maderajhontlv321Pas encore d'évaluation
- Prop Mecanicas 1Document15 pagesProp Mecanicas 1Víctor RamírezPas encore d'évaluation
- Estilo Oriental, Bepsy Arias PDFDocument10 pagesEstilo Oriental, Bepsy Arias PDFBepsy AriasPas encore d'évaluation
- Metodos Epa 1 Al 5 ResumenDocument2 pagesMetodos Epa 1 Al 5 ResumenDiana Carolina BeltranPas encore d'évaluation