Vous aimerez peut-être aussi
- Kochar Inderkumar Asst. Professor MPSTME, MumbaiDocument66 pagesKochar Inderkumar Asst. Professor MPSTME, MumbaiKochar InderkumarPas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- Digital Filter Design: Wang Weilian Wlwang@ynu - Edu.cn School of Information Science and Technology Yunnan UniversityDocument41 pagesDigital Filter Design: Wang Weilian Wlwang@ynu - Edu.cn School of Information Science and Technology Yunnan Universitysannu91Pas encore d'évaluation
- Some Case Studies on Signal, Audio and Image Processing Using MatlabD'EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabPas encore d'évaluation
- Lecture 7Document42 pagesLecture 7Andika Dwi RubyantoroPas encore d'évaluation
- Introduction To Discrete Time Systems and The Z TransformDocument93 pagesIntroduction To Discrete Time Systems and The Z TransformRaufzha AnandaPas encore d'évaluation
- IIR Filter DesignDocument40 pagesIIR Filter DesignMxaz MyzxPas encore d'évaluation
- Bandpass SignallingDocument16 pagesBandpass SignallingNitin SahuPas encore d'évaluation
- 2 Basics DSP AV Z Filters NoiseDocument31 pages2 Basics DSP AV Z Filters NoisevignanarajPas encore d'évaluation
- DSP Notes KAR Part2Document23 pagesDSP Notes KAR Part2Srinivas VNPas encore d'évaluation
- Signal Processing Assignment: Donald Carr May 18, 2005Document39 pagesSignal Processing Assignment: Donald Carr May 18, 2005sshebiPas encore d'évaluation
- Chapter 7 Filter Design TechniquesDocument152 pagesChapter 7 Filter Design TechniquesluckyamruPas encore d'évaluation
- Bilinear Tranformation2Document11 pagesBilinear Tranformation2Ayodele Emmanuel SonugaPas encore d'évaluation
- Design of Infinite Impulse Response (IIR) Digital FiltersDocument16 pagesDesign of Infinite Impulse Response (IIR) Digital FiltersSedat IsterPas encore d'évaluation
- FIR and IIR Filter AsdsaDocument55 pagesFIR and IIR Filter AsdsaShanmuka ReddyPas encore d'évaluation
- 5th OrderDocument14 pages5th OrderAbbas Sabbar GhaliPas encore d'évaluation
- Implement Ac I OnDocument26 pagesImplement Ac I OnMaria GreenPas encore d'évaluation
- Frequency ResponseDocument9 pagesFrequency ResponseAnanda RamanPas encore d'évaluation
- Priyanshu Raj 20EE10055 Exp 5 Part 2Document17 pagesPriyanshu Raj 20EE10055 Exp 5 Part 2Priyanshu rajPas encore d'évaluation
- Introduction To Equalization: Guy Wolf Roy Ron Guy ShwartzDocument50 pagesIntroduction To Equalization: Guy Wolf Roy Ron Guy ShwartzShilpi RaiPas encore d'évaluation
- Bilinear Transformation Made Easy: S A S HDocument5 pagesBilinear Transformation Made Easy: S A S HgeorgesmaccarioPas encore d'évaluation
- 14 Interpolation DecimationDocument32 pages14 Interpolation DecimationSanjay BalwaniPas encore d'évaluation
- Interpolation & Decimation: - Sampling Period at The OutputDocument32 pagesInterpolation & Decimation: - Sampling Period at The OutputAnand Krishna GhattyPas encore d'évaluation
- CSD Practical MannualDocument35 pagesCSD Practical MannualitsurturnPas encore d'évaluation
- EC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFDocument13 pagesEC6502-Principal of Digital Signal Processing - 2013 - Regulation PDFSuba Sara SubaPas encore d'évaluation
- Digital Signal ProcessingDocument7 pagesDigital Signal ProcessingJagadeesh KumarPas encore d'évaluation
- EC 2314 Digital Signal Processing - Filter Realization: by Dr. K. UdhayakumarDocument40 pagesEC 2314 Digital Signal Processing - Filter Realization: by Dr. K. UdhayakumarAzwar CxPas encore d'évaluation
- Digital Filters (IIR)Document28 pagesDigital Filters (IIR)Sujatanu0% (1)
- Digital State-Variable Filters: 1 Normalized Second-Order Continuous-Time Lowpass FilterDocument9 pagesDigital State-Variable Filters: 1 Normalized Second-Order Continuous-Time Lowpass FilterJennifer WilliamsPas encore d'évaluation
- Stationary Random ProcessesDocument62 pagesStationary Random ProcessesGramoz CubreliPas encore d'évaluation
- EPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityDocument58 pagesEPM 4056 Feedback Control Analysis and Design: Trim. 48-Trimester 2 2011/2012 Ching Seong Tan Multimedia UniversityTan Yong LiangPas encore d'évaluation
- Final 091002Document13 pagesFinal 091002kalidass88Pas encore d'évaluation
- DSP Objective Type QuestionsDocument15 pagesDSP Objective Type QuestionsAdnan Zahid67% (3)
- DSP Lab Ii Signals, Sampling, Z Transform and Convolution: Is Sampled at 1000 HZ Over 0.1 Second DurationDocument1 pageDSP Lab Ii Signals, Sampling, Z Transform and Convolution: Is Sampled at 1000 HZ Over 0.1 Second DurationLaka DaisyPas encore d'évaluation
- An Implementation of Distributed Arithmetic Adaptive Filter Using Coefficient Distribution Without Look-Up TableDocument30 pagesAn Implementation of Distributed Arithmetic Adaptive Filter Using Coefficient Distribution Without Look-Up TableAnirut M TkttPas encore d'évaluation
- Chap7-IIR Filter DesignDocument114 pagesChap7-IIR Filter DesignHANSAPas encore d'évaluation
- Number Systems and Conversion: This Chapter in The Book IncludesDocument34 pagesNumber Systems and Conversion: This Chapter in The Book Includes최재원Pas encore d'évaluation
- The Handbook of Formulas and Tables For Signal ProcessingDocument8 pagesThe Handbook of Formulas and Tables For Signal ProcessingPrakash BachaniPas encore d'évaluation
- Digital Audio EffectsDocument111 pagesDigital Audio EffectsshervinshPas encore d'évaluation
- PID ControlDocument56 pagesPID ControlSyafRizal100% (1)
- Chapter 4 Retiming: 1 ECE734 VLSI Arrays For Digital Signal ProcessingDocument24 pagesChapter 4 Retiming: 1 ECE734 VLSI Arrays For Digital Signal ProcessingaravinthcpPas encore d'évaluation
- Discrete Time SystemDocument7 pagesDiscrete Time SystemMark Ryan ToPas encore d'évaluation
- Lesson17 2Document34 pagesLesson17 2api-277477207Pas encore d'évaluation
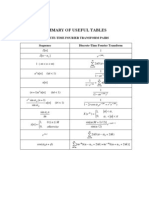
- Appendix Summary of Useful Tables: Discrete-Time Fourier Transform Pairs Sequence Discrete-Time Fourier TransformDocument7 pagesAppendix Summary of Useful Tables: Discrete-Time Fourier Transform Pairs Sequence Discrete-Time Fourier Transform鲁肃津Pas encore d'évaluation
- Discrete Time Signal Processing Unit-Ii Question Bank Part - A (Two Marks)Document2 pagesDiscrete Time Signal Processing Unit-Ii Question Bank Part - A (Two Marks)Anonymous Ndsvh2soPas encore d'évaluation
- State Variable FilterDocument9 pagesState Variable FilterSimadri BadatyaPas encore d'évaluation
- Filter DesignDocument9 pagesFilter DesignTaylor MaddixPas encore d'évaluation
- (EE3101) Laboratory 2 ReportDocument14 pages(EE3101) Laboratory 2 Report94747Pas encore d'évaluation
- DTSP Easy SoltnDocument15 pagesDTSP Easy SoltnluckyamruPas encore d'évaluation
- COMSATS Institute of Information Technology: Terminal - Fall 2014Document10 pagesCOMSATS Institute of Information Technology: Terminal - Fall 2014Rabya BahadurPas encore d'évaluation
- DSP QuestionsDocument8 pagesDSP Questionsjjshree79Pas encore d'évaluation
- (A305) Otomatik Kontrol Ders Notu (Slayt)Document27 pages(A305) Otomatik Kontrol Ders Notu (Slayt)Mücahit Ezel100% (1)
- 6.0 Iir Filter Bee3213Document54 pages6.0 Iir Filter Bee3213Dora TengPas encore d'évaluation
- Digital Filters - Implementation and Design: Basic Filtering OperationsDocument19 pagesDigital Filters - Implementation and Design: Basic Filtering OperationsPATEL SWAPNEELPas encore d'évaluation
- PID Algorithms (Topic 26)Document20 pagesPID Algorithms (Topic 26)MustaphaRamziPas encore d'évaluation
- Sinusoidal Response.: S A S XDocument15 pagesSinusoidal Response.: S A S XManidhar ThulaPas encore d'évaluation
- Digital Signal Processing QUESTION BANKDocument5 pagesDigital Signal Processing QUESTION BANKSaran SekaranPas encore d'évaluation
- QB 2Document4 pagesQB 2Veena Divya KrishnappaPas encore d'évaluation
- Continuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap02Document36 pagesContinuous and Discrete Time Signals and Systems (Mandal & Asif) Solutions - Chap02Lyubomir Hristov91% (11)
- Procurement Audit PlanDocument12 pagesProcurement Audit PlanMustafa Bilal100% (1)
- Ewellery Ndustry: Presentation OnDocument26 pagesEwellery Ndustry: Presentation Onharishgnr0% (1)
- European Steel and Alloy Grades: 16Mncr5 (1.7131)Document3 pagesEuropean Steel and Alloy Grades: 16Mncr5 (1.7131)farshid KarpasandPas encore d'évaluation
- 1 Ton Per Hour Electrode Production LineDocument7 pages1 Ton Per Hour Electrode Production LineMohamed AdelPas encore d'évaluation
- Bench VortexDocument3 pagesBench VortexRio FebriantoPas encore d'évaluation
- WWW - Manaresults.co - In: Internet of ThingsDocument3 pagesWWW - Manaresults.co - In: Internet of Thingsbabudurga700Pas encore d'évaluation
- Software Hackathon Problem StatementsDocument2 pagesSoftware Hackathon Problem StatementsLinusNelson100% (2)
- Coca-Cola Summer Intern ReportDocument70 pagesCoca-Cola Summer Intern ReportSourabh NagpalPas encore d'évaluation
- Contemp World Module 2 Topics 1 4Document95 pagesContemp World Module 2 Topics 1 4Miguel EderPas encore d'évaluation
- Mix Cases UploadDocument4 pagesMix Cases UploadLu CasPas encore d'évaluation
- SCHEDULE OF FEES - FinalDocument1 pageSCHEDULE OF FEES - FinalAbhishek SunaPas encore d'évaluation
- bz4x EbrochureDocument21 pagesbz4x EbrochureoswaldcameronPas encore d'évaluation
- Fact Pack Financial Services KenyaDocument12 pagesFact Pack Financial Services KenyaCatherinePas encore d'évaluation
- People V Superior Court (Baez)Document19 pagesPeople V Superior Court (Baez)Kate ChatfieldPas encore d'évaluation
- Common OPCRF Contents For 2021 2022 FINALE 2Document21 pagesCommon OPCRF Contents For 2021 2022 FINALE 2JENNIFER FONTANILLA100% (30)
- Fortigate Fortiwifi 40F Series: Data SheetDocument6 pagesFortigate Fortiwifi 40F Series: Data SheetDiego Carrasco DíazPas encore d'évaluation
- Strength and Microscale Properties of Bamboo FiberDocument14 pagesStrength and Microscale Properties of Bamboo FiberDm EerzaPas encore d'évaluation
- Civil NatureDocument3 pagesCivil NatureZ_Jahangeer100% (4)
- Channel System: Presented byDocument78 pagesChannel System: Presented bygrace22mba22Pas encore d'évaluation
- Marketing Management - Pgpmi - Class 12Document44 pagesMarketing Management - Pgpmi - Class 12Sivapriya KrishnanPas encore d'évaluation
- Strategic Management ModelsDocument4 pagesStrategic Management ModelsBarno NicholusPas encore d'évaluation
- Solutions To Questions - Chapter 6 Mortgages: Additional Concepts, Analysis, and Applications Question 6-1Document16 pagesSolutions To Questions - Chapter 6 Mortgages: Additional Concepts, Analysis, and Applications Question 6-1--bolabolaPas encore d'évaluation
- Standard Cost EstimatesDocument12 pagesStandard Cost EstimatesMasroon ẨśầŕPas encore d'évaluation
- Nasoya FoodsDocument2 pagesNasoya Foodsanamta100% (1)
- TNCT Q2 Module3cDocument15 pagesTNCT Q2 Module3cashurishuri411100% (1)
- Auto Report LogDocument3 pagesAuto Report LogDaniel LermaPas encore d'évaluation
- Bharat Heavy Electricals LimitedDocument483 pagesBharat Heavy Electricals LimitedRahul NagarPas encore d'évaluation
- Ss1169 - Telecom Frameworx l1TMFDocument65 pagesSs1169 - Telecom Frameworx l1TMFPrince SinghPas encore d'évaluation
- TokyoDocument6 pagesTokyoMarcio BonziniPas encore d'évaluation
- Sika Saudi Arabia: Safety Data SheetDocument4 pagesSika Saudi Arabia: Safety Data Sheetusman khalid100% (1)