Vous aimerez peut-être aussi
- Introduction to Single Degree of Freedom SystemsDocument99 pagesIntroduction to Single Degree of Freedom SystemsJura PateregaPas encore d'évaluation
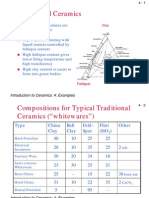
- Introduction To CeramicsDocument29 pagesIntroduction To CeramicsShrikrishna BirajdarPas encore d'évaluation
- Formability Training Dec2012 PDFDocument111 pagesFormability Training Dec2012 PDFShrikrishna BirajdarPas encore d'évaluation
- Lecture 9-10 - Frequency Response MethodsDocument68 pagesLecture 9-10 - Frequency Response MethodsDerrick Maatla Moadi100% (1)
- Vibration in Two Lectures: Free, Forced, Damped and Undamped SystemsDocument12 pagesVibration in Two Lectures: Free, Forced, Damped and Undamped SystemsUjjawal GuptaPas encore d'évaluation
- Quality Is Certain: How to Implement Crosby's 14 StepsDocument28 pagesQuality Is Certain: How to Implement Crosby's 14 StepsShrikrishna BirajdarPas encore d'évaluation
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsD'EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsPas encore d'évaluation
- Mechanical Vibration - MSD - Part 2Document9 pagesMechanical Vibration - MSD - Part 2Mohammad Saad SalimPas encore d'évaluation
- Design of An Elevated Compressor Table Top Structure Considering Soil-Pile-Structure InteractionDocument11 pagesDesign of An Elevated Compressor Table Top Structure Considering Soil-Pile-Structure InteractionMin KhantPas encore d'évaluation
- 18CS06 Structural Dynamics: Duhamel'S IntegralDocument29 pages18CS06 Structural Dynamics: Duhamel'S Integral20MC06 - SORNAMUGI KPas encore d'évaluation
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariPas encore d'évaluation
- AcousticsDocument50 pagesAcousticsalvareszPas encore d'évaluation
- Dynamic Characteristics of Sensors and Measurement SystemsDocument29 pagesDynamic Characteristics of Sensors and Measurement SystemsveenadivyakishPas encore d'évaluation
- Irc SP.114.2018Document146 pagesIrc SP.114.2018Anonymous YHcvra8Xw6Pas encore d'évaluation
- Dynamic Charactorstics of An InstrumentsDocument30 pagesDynamic Charactorstics of An InstrumentsDhinakaran VeemanPas encore d'évaluation
- Harmonically Excited VibrationDocument61 pagesHarmonically Excited VibrationSiddharth MohanPas encore d'évaluation
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)D'EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)Pas encore d'évaluation
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11D'EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Pas encore d'évaluation
- Footfall Vibration and Finite Element AnalysisDocument4 pagesFootfall Vibration and Finite Element AnalysisthaibinhkxPas encore d'évaluation
- Lighting & Acoustic Performance Evaluation and DesignDocument123 pagesLighting & Acoustic Performance Evaluation and DesignTsaiWanChing100% (1)
- Section 1 Review of Fundamentals: S1-1 NAS122, Section 1, January 2004 2004 MSC - Software CorporationDocument26 pagesSection 1 Review of Fundamentals: S1-1 NAS122, Section 1, January 2004 2004 MSC - Software CorporationroylmechPas encore d'évaluation
- Section 1 Review of FundamentalsDocument23 pagesSection 1 Review of FundamentalsIvana Junia AleloPas encore d'évaluation
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزPas encore d'évaluation
- DRG Sesi 4 SDoF Forced VibrationDocument10 pagesDRG Sesi 4 SDoF Forced VibrationanggaPas encore d'évaluation
- SDOFDocument30 pagesSDOFb ramachandraPas encore d'évaluation
- Forced-Vibration Response to Harmonic LoadingDocument11 pagesForced-Vibration Response to Harmonic LoadingLâm KhanhPas encore d'évaluation
- Instrumentation and Product Testing: Dynamic Characteristics of Measurement SystemDocument25 pagesInstrumentation and Product Testing: Dynamic Characteristics of Measurement SystemCircuit ControlarPas encore d'évaluation
- Forced-Vibration Response: Forced - Vibration Harmonic Loading Periodic Loading Impulsive Loading General Dynamic LoadingDocument15 pagesForced-Vibration Response: Forced - Vibration Harmonic Loading Periodic Loading Impulsive Loading General Dynamic LoadingChí Khang ĐặngPas encore d'évaluation
- Transfer Function Response of First OrderDocument19 pagesTransfer Function Response of First OrderRatnesh PandeyPas encore d'évaluation
- Appendix A and B in Geotechnical Earthquake EngineeringDocument35 pagesAppendix A and B in Geotechnical Earthquake EngineeringEl-kapitan AdetiaPas encore d'évaluation
- Control Systems AssignmentDocument10 pagesControl Systems AssignmentBrightPas encore d'évaluation
- DRG Sesi 5 SDoF Transient ExcitationDocument21 pagesDRG Sesi 5 SDoF Transient ExcitationanggaPas encore d'évaluation
- Free Vibration of Single-Degree-Of-freedom SystemsDocument7 pagesFree Vibration of Single-Degree-Of-freedom SystemsShafiq ShajaPas encore d'évaluation
- Free Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoDocument20 pagesFree Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoMihir AsharPas encore d'évaluation
- Forced Vibration of a Single DOF SystemDocument9 pagesForced Vibration of a Single DOF SystemkibzeamPas encore d'évaluation
- Lec 14Document13 pagesLec 14RUCHIRA KUMAR PRADHANPas encore d'évaluation
- Digital Oscillator: Final Mini Project Report OnDocument10 pagesDigital Oscillator: Final Mini Project Report OnNagendra KumarPas encore d'évaluation
- Shock-Response-Spectrum Analysis of Sampled-Data Polynomial For Track-Seeking Control in Hard Disk DrivesDocument6 pagesShock-Response-Spectrum Analysis of Sampled-Data Polynomial For Track-Seeking Control in Hard Disk DrivesjackPas encore d'évaluation
- Frequency-Domain Analysis of Dynamic SystemsDocument27 pagesFrequency-Domain Analysis of Dynamic SystemsmoomeejeePas encore d'évaluation
- Mechanical Vibration PDFDocument51 pagesMechanical Vibration PDFEric Kerr100% (1)
- Response of Structures To Impulsive Loads: Abstract: Impulsive Force Is A Force of Large Magnitude That Acts Over ADocument4 pagesResponse of Structures To Impulsive Loads: Abstract: Impulsive Force Is A Force of Large Magnitude That Acts Over ADhurai KesavanPas encore d'évaluation
- LS1 Linear Systems ExperimentDocument7 pagesLS1 Linear Systems ExperimentYousif AlmashhadyPas encore d'évaluation
- C2 Sdof2 PDFDocument20 pagesC2 Sdof2 PDFArThur BangunPas encore d'évaluation
- Digital Oscillator: Final Mini Project Report OnDocument10 pagesDigital Oscillator: Final Mini Project Report OnNagendra KumarPas encore d'évaluation
- Presentation1-11 (Slids of Structures)Document12 pagesPresentation1-11 (Slids of Structures)Naweed rabaniPas encore d'évaluation
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pages1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghPas encore d'évaluation
- STRC201 Sdof JMWB PDFDocument99 pagesSTRC201 Sdof JMWB PDFAkash ChandraPas encore d'évaluation
- Response of Linear SDOF Systems To Harmonic ExcitationDocument20 pagesResponse of Linear SDOF Systems To Harmonic ExcitationalappbhattPas encore d'évaluation
- Vibrations Chapter 5 - 2013 - ModDocument48 pagesVibrations Chapter 5 - 2013 - ModZain BaqarPas encore d'évaluation
- ME421 Mechanical Vibrations: Assignment 2 Due Thursday 9/17/15Document2 pagesME421 Mechanical Vibrations: Assignment 2 Due Thursday 9/17/15robert kasperPas encore d'évaluation
- Transient & Steady State Response AnalysisDocument46 pagesTransient & Steady State Response AnalysisSwati AgarwalPas encore d'évaluation
- Chapter 9: Frequency-Domain Analysis of Dynamic SystemsDocument11 pagesChapter 9: Frequency-Domain Analysis of Dynamic SystemsinnoodiraPas encore d'évaluation
- An Improved Recursive Formula For Calculating Shock Response Spectra-SRS-SmallwoodDocument7 pagesAn Improved Recursive Formula For Calculating Shock Response Spectra-SRS-SmallwoodjackPas encore d'évaluation
- Mee5206 Chapter 3Document62 pagesMee5206 Chapter 3Lim AndrewPas encore d'évaluation
- AC Circuit AnalysisDocument45 pagesAC Circuit Analysissodapop1999Pas encore d'évaluation
- Review of Mechanical VibrationsDocument37 pagesReview of Mechanical VibrationsMario SitorusPas encore d'évaluation
- 26 Control Engineering LAbDocument50 pages26 Control Engineering LAbEashan PendsePas encore d'évaluation
- Bda31103 Lect02 - 1 Dof Part1Document20 pagesBda31103 Lect02 - 1 Dof Part1Ong Kok MengPas encore d'évaluation
- M.E CAD 2015 ADVANCED VIBRATION ENGINEERINGDocument26 pagesM.E CAD 2015 ADVANCED VIBRATION ENGINEERINGgurusamyPas encore d'évaluation
- LTI system analysis in frequency and time domainsDocument21 pagesLTI system analysis in frequency and time domainsSreejith NairPas encore d'évaluation
- Forced Vibrations: K KX CX F XDocument178 pagesForced Vibrations: K KX CX F XGhanshyam Barhate100% (2)
- Vib Meas Ins11Document12 pagesVib Meas Ins11113314Pas encore d'évaluation
- Chapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsDocument86 pagesChapter 1 & 2 - Introduction To Vibrations and Single DOF SystemsMohamad Faiz TonyPas encore d'évaluation
- Oscillatory Motion Explained: Position, Velocity, Acceleration, Energy and ExamplesDocument41 pagesOscillatory Motion Explained: Position, Velocity, Acceleration, Energy and ExamplesMohamad AsrulPas encore d'évaluation
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingD'EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingPas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- Product Development Engineer Pune RoleDocument2 pagesProduct Development Engineer Pune RoleShrikrishna BirajdarPas encore d'évaluation
- CCT Data For Heat TreatmentDocument11 pagesCCT Data For Heat TreatmentShrikrishna BirajdarPas encore d'évaluation
- Name: Shrikrishna Raghunath Birajdar: Phone: +91 7738485628 / 7977327873 September, 1988Document2 pagesName: Shrikrishna Raghunath Birajdar: Phone: +91 7738485628 / 7977327873 September, 1988Shrikrishna BirajdarPas encore d'évaluation
- Formulae and DefinitionsDocument58 pagesFormulae and DefinitionsShrikrishna BirajdarPas encore d'évaluation
- RentReceipt PDFDocument1 pageRentReceipt PDFShrikrishna BirajdarPas encore d'évaluation
- Match DetailsDocument5 pagesMatch DetailsShrikrishna BirajdarPas encore d'évaluation
- India BS VI Policy Update VFDocument10 pagesIndia BS VI Policy Update VFAnbuPas encore d'évaluation
- Surface Finish - Typical ValuesDocument1 pageSurface Finish - Typical ValuesShrikrishna BirajdarPas encore d'évaluation
- Aluminium AlloyDocument5 pagesAluminium AlloyShrikrishna BirajdarPas encore d'évaluation
- Vidal Health Insurance TPA Network PDFDocument3 pagesVidal Health Insurance TPA Network PDFShrikrishna BirajdarPas encore d'évaluation
- Vidal Health Insurance TPA Network PDFDocument3 pagesVidal Health Insurance TPA Network PDFShrikrishna BirajdarPas encore d'évaluation
- Print OlaDocument2 pagesPrint OlaShrikrishna Birajdar58% (12)
- Surface Finish - Typical ValuesDocument1 pageSurface Finish - Typical ValuesShrikrishna BirajdarPas encore d'évaluation
- Print OlaDocument2 pagesPrint OlaShrikrishna BirajdarPas encore d'évaluation
- 1Document1 page1Shrikrishna BirajdarPas encore d'évaluation
- Graphene BasicsDocument41 pagesGraphene BasicsShrikrishna BirajdarPas encore d'évaluation
- Management Stories in MarathiDocument1 pageManagement Stories in MarathiShrikrishna BirajdarPas encore d'évaluation
- Report RPDDocument15 pagesReport RPDShrikrishna BirajdarPas encore d'évaluation
- MM654 Prasad Lecture 1 July18Document8 pagesMM654 Prasad Lecture 1 July18Shrikrishna BirajdarPas encore d'évaluation
- Application Form: Student SSC DetailsDocument3 pagesApplication Form: Student SSC DetailsShrikrishna BirajdarPas encore d'évaluation
- Syllabus 1st Sem M.techDocument7 pagesSyllabus 1st Sem M.techShrikrishna BirajdarPas encore d'évaluation
- Academic CalenderDocument9 pagesAcademic CalenderShrikrishna BirajdarPas encore d'évaluation
- Academic CalenderDocument9 pagesAcademic CalenderShrikrishna BirajdarPas encore d'évaluation
- AssignmentDocument1 pageAssignmentShrikrishna BirajdarPas encore d'évaluation
- Adaptiveforce Bacedmultimodepushoveranalysis PDFDocument12 pagesAdaptiveforce Bacedmultimodepushoveranalysis PDFrahmaniPas encore d'évaluation
- Citizens Blast Guide To Blasting 4-26-17Document4 pagesCitizens Blast Guide To Blasting 4-26-17ravibelavadiPas encore d'évaluation
- Fluid-Structure Interaction Methods for Tube BundlesDocument24 pagesFluid-Structure Interaction Methods for Tube BundlesMarcus Girão de MoraisPas encore d'évaluation
- 1" (25mm), 2" (50mm) Deflection: DescriptionDocument4 pages1" (25mm), 2" (50mm) Deflection: DescriptionHARRIS NGUYENPas encore d'évaluation
- Response SpectrukmDocument24 pagesResponse SpectrukmpreranagannaPas encore d'évaluation
- Manual Delta Mobrey Ip4001 RevCA Mobrey VLS Series Manual A4 PRINT NewDocument12 pagesManual Delta Mobrey Ip4001 RevCA Mobrey VLS Series Manual A4 PRINT NewJeerasak TunmeesukPas encore d'évaluation
- Vib FileDocument3 pagesVib FileJohn Louie PimentelPas encore d'évaluation
- Experiment 4 Vibrating StringsDocument7 pagesExperiment 4 Vibrating StringsDonnaliza Delos Reyes0% (1)
- CMAS 100-SL NewDocument5 pagesCMAS 100-SL NewENJINIRING UPDKBDLPas encore d'évaluation
- Vibration Analysis of Hybrid Cyramic Ball BearingsDocument16 pagesVibration Analysis of Hybrid Cyramic Ball BearingsRaghavendra Raghav100% (2)
- Beginnersguide LISA PDFDocument123 pagesBeginnersguide LISA PDFVanja BulovicPas encore d'évaluation
- Making Roller-Compacted Concrete in Cylinder Molds Using A Vibrating TableDocument4 pagesMaking Roller-Compacted Concrete in Cylinder Molds Using A Vibrating TableLam Tang VanPas encore d'évaluation
- X ViberDocument4 pagesX ViberNivedh VijayakrishnanPas encore d'évaluation
- 3500 40m Proximitor Monitor Module 143488-01Document157 pages3500 40m Proximitor Monitor Module 143488-01Denis Jimenez100% (1)
- City Montessori School nurtures futureDocument22 pagesCity Montessori School nurtures futureanislinek15Pas encore d'évaluation
- OTC 4134 Collisions Between Ships and Offshore PlatformsDocument9 pagesOTC 4134 Collisions Between Ships and Offshore PlatformsRaghu MahadevappaPas encore d'évaluation
- Course Title: Advanced Dynamics of Structure Course Code: MTSE-102 Semester: IDocument21 pagesCourse Title: Advanced Dynamics of Structure Course Code: MTSE-102 Semester: IEr Ashish PoudelPas encore d'évaluation
- 9AKK107496 Data Sheet - ABB AbilityTM Smart Sensor For Pumps - EN - RevB - LowresDocument2 pages9AKK107496 Data Sheet - ABB AbilityTM Smart Sensor For Pumps - EN - RevB - LowresHeera JanPas encore d'évaluation
- Vibration Contro of Steel Jacket Offshore Platform Structures With Damping Isolation Systems - OuDocument14 pagesVibration Contro of Steel Jacket Offshore Platform Structures With Damping Isolation Systems - OuRicardo RamirezPas encore d'évaluation
- Fault DetectionDocument14 pagesFault DetectionHimanshu PatilPas encore d'évaluation
- M230HGE-L20 C2 Ver.2.0-6 Approval SpecificationDocument17 pagesM230HGE-L20 C2 Ver.2.0-6 Approval SpecificationpasmanteriabellaPas encore d'évaluation
- Effect of Delay Timing & Blast Size on Fragmentation & Muckpile ShapeDocument55 pagesEffect of Delay Timing & Blast Size on Fragmentation & Muckpile ShapealexanderPas encore d'évaluation
- Volume51 Number4Document60 pagesVolume51 Number4torinomgPas encore d'évaluation
- 49 - HD - 2000 New Logo LowDocument12 pages49 - HD - 2000 New Logo LowAgata OwczarekPas encore d'évaluation