Vous aimerez peut-être aussi
- TE Time Table Insem 2015 PDFDocument3 pagesTE Time Table Insem 2015 PDFDhondiram Maruthi KakrePas encore d'évaluation
- Be 2012 Course Insem 2015Document7 pagesBe 2012 Course Insem 2015contrasterPas encore d'évaluation
- Admission BE 15-16Document66 pagesAdmission BE 15-16Dhondiram Maruthi KakrePas encore d'évaluation
- ApplicationDocument1 pageApplicationDhondiram Maruthi KakrePas encore d'évaluation
- 2070 201506 PDFDocument1 page2070 201506 PDFDhondiram Maruthi KakrePas encore d'évaluation
- Paper 15Document3 pagesPaper 15Dhondiram Maruthi KakrePas encore d'évaluation
- 2070 201504 PDFDocument1 page2070 201504 PDFDhondiram Maruthi KakrePas encore d'évaluation
- India'S Three Stage Nuclear ProgrammeDocument5 pagesIndia'S Three Stage Nuclear ProgrammeDhondiram Maruthi KakrePas encore d'évaluation
- Admission SE 15-16 - Roll Call ListDocument28 pagesAdmission SE 15-16 - Roll Call ListDhondiram Maruthi KakrePas encore d'évaluation
- Paper 15Document3 pagesPaper 15Dhondiram Maruthi KakrePas encore d'évaluation
- 2070 201506 PDFDocument1 page2070 201506 PDFDhondiram Maruthi KakrePas encore d'évaluation
- BE June 15 AttendanceDocument15 pagesBE June 15 AttendanceDhondiram Maruthi KakrePas encore d'évaluation
- Paper 15Document3 pagesPaper 15Dhondiram Maruthi KakrePas encore d'évaluation
- 2070 201505 PDFDocument1 page2070 201505 PDFDhondiram Maruthi KakrePas encore d'évaluation
- TransNum - Aug 04 - 095317 - Bank Statement PDFDocument5 pagesTransNum - Aug 04 - 095317 - Bank Statement PDFDhondiram Maruthi KakrePas encore d'évaluation
- BE June 15 Attendance PQDocument15 pagesBE June 15 Attendance PQDhondiram Maruthi KakrePas encore d'évaluation
- BE Aug 15 AttendanceDocument6 pagesBE Aug 15 AttendanceDhondiram Maruthi KakrePas encore d'évaluation
- TE 15 Attendance Theory June 2015Document9 pagesTE 15 Attendance Theory June 2015Dhondiram Maruthi KakrePas encore d'évaluation
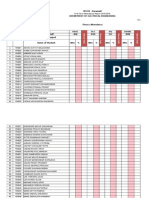
- Class: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDocument16 pagesClass: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDhondiram Maruthi KakrePas encore d'évaluation
- Chaitanya Kulkarni Open PDFDocument1 pageChaitanya Kulkarni Open PDFDhondiram Maruthi KakrePas encore d'évaluation
- Sandip Randive Open PDFDocument1 pageSandip Randive Open PDFDhondiram Maruthi KakrePas encore d'évaluation
- India'S Three Stage Nuclear ProgrammeDocument5 pagesIndia'S Three Stage Nuclear ProgrammeDhondiram Maruthi KakrePas encore d'évaluation
- Sandip Randive Open PDFDocument1 pageSandip Randive Open PDFDhondiram Maruthi KakrePas encore d'évaluation
- BE Aug 15 AttendanceDocument12 pagesBE Aug 15 AttendanceDhondiram Maruthi KakrePas encore d'évaluation
- BE June 15 Attendance PQDocument15 pagesBE June 15 Attendance PQDhondiram Maruthi KakrePas encore d'évaluation
- FE Roll Call List for VPCOE, BaramatiDocument21 pagesFE Roll Call List for VPCOE, BaramatiDhondiram Maruthi KakrePas encore d'évaluation
- Vidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Document4 pagesVidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Dhondiram Maruthi KakrePas encore d'évaluation
- Vidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Document4 pagesVidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Dhondiram Maruthi KakrePas encore d'évaluation
- VPCOE Baramati BEE Practical Course Plan 2015-16Document2 pagesVPCOE Baramati BEE Practical Course Plan 2015-16Dhondiram Maruthi KakrePas encore d'évaluation
- Presentation PDFDocument1 pagePresentation PDFDhondiram Maruthi KakrePas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5783)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Drv8880 2-A Stepper Motor Driver With Autotune™: 1 Features 2 ApplicationsDocument48 pagesDrv8880 2-A Stepper Motor Driver With Autotune™: 1 Features 2 ApplicationsUdit AgrawalPas encore d'évaluation
- Question - Bank - Ee201Document16 pagesQuestion - Bank - Ee201joydeep12Pas encore d'évaluation
- Mail To Reg Stud 64818 402275 20200109 094355 241 PDFDocument8 pagesMail To Reg Stud 64818 402275 20200109 094355 241 PDFlokeshwar rathiyaPas encore d'évaluation
- Power Electronics Electric DrivesDocument25 pagesPower Electronics Electric DrivesMohd SarfarazPas encore d'évaluation
- Report On Police LightDocument4 pagesReport On Police LightDeepuPas encore d'évaluation
- LM117 PDFDocument28 pagesLM117 PDFPedro OspinaPas encore d'évaluation
- Electronic Load Open SourceDocument71 pagesElectronic Load Open SourceJaime Andres SalasPas encore d'évaluation
- Chapter 3 - AC FundamentalsDocument21 pagesChapter 3 - AC FundamentalsNur AfiqahPas encore d'évaluation
- ARM TrainingDocument2 pagesARM TrainingbabanpPas encore d'évaluation
- CE BJT Configuration Parameters and EquationsDocument2 pagesCE BJT Configuration Parameters and EquationsZeeshanMirzaPas encore d'évaluation
- Ece206 EDCDocument7 pagesEce206 EDCManojSharmaPas encore d'évaluation
- Triac Applications - Great TheoryDocument48 pagesTriac Applications - Great TheoryJeff MaxwellPas encore d'évaluation
- Power Supply BasicsDocument368 pagesPower Supply BasicsSinyxPas encore d'évaluation
- 8N80Document7 pages8N80niainaeloi_842256206Pas encore d'évaluation
- Datasheet 8V1180002Document4 pagesDatasheet 8V1180002raghupathypsPas encore d'évaluation
- A Guide To Flyback Transformers - CoilcraftDocument5 pagesA Guide To Flyback Transformers - Coilcraftjit genesisPas encore d'évaluation
- F. Repair TechnologyDocument5 pagesF. Repair Technologypushpak2312Pas encore d'évaluation
- Optcl MT Electrical Question Paper With Answers Sample Model Paper Management TraineesDocument15 pagesOptcl MT Electrical Question Paper With Answers Sample Model Paper Management TraineesJanmejaya Das0% (1)
- Basic Electronics Lec-1Document41 pagesBasic Electronics Lec-1world cup 2019Pas encore d'évaluation
- PC AT Technical Reference Mar84Document644 pagesPC AT Technical Reference Mar84kgrhoadsPas encore d'évaluation
- FusesDocument192 pagesFusesjokanovPas encore d'évaluation
- 20" TFT TV Service ManualDocument60 pages20" TFT TV Service ManualborlasPas encore d'évaluation
- ss8050 Datasheet PDFDocument1 pagess8050 Datasheet PDFArifin NoviantoPas encore d'évaluation
- DOCK/CHEMICALS Is Semiconductors DecisionDocument2 pagesDOCK/CHEMICALS Is Semiconductors DecisionAlexandra HartPas encore d'évaluation
- Electronics Washing Machine Control - Circuit Diagram: Timer Circuit Switching CircuitsDocument6 pagesElectronics Washing Machine Control - Circuit Diagram: Timer Circuit Switching CircuitsJorge Luis Espino CruzPas encore d'évaluation
- 230v LED Driver Circuit Diagram, Working and ApplicationsDocument8 pages230v LED Driver Circuit Diagram, Working and ApplicationsAbbas Sabbar GhaliPas encore d'évaluation
- Gunn Diode MainDocument40 pagesGunn Diode MainPradeepPas encore d'évaluation
- Nho2 BCBNVDocument4 pagesNho2 BCBNVavijitjhakassPas encore d'évaluation
- 24LC16BDocument25 pages24LC16BAnonymous 5bBQ6QKPas encore d'évaluation
- Kia4559p Kec PDFDocument4 pagesKia4559p Kec PDFMiloš MarkovićPas encore d'évaluation