Vous aimerez peut-être aussi
- PJC h2 Math p1 SolutionsDocument13 pagesPJC h2 Math p1 SolutionsjimmytanlimlongPas encore d'évaluation
- Solutions To Home Practice Test/Mathematics: Integral Calculus-2 HWT - 1Document12 pagesSolutions To Home Practice Test/Mathematics: Integral Calculus-2 HWT - 1varunkohliinPas encore d'évaluation
- Analytic Geometry: Graphic Solutions Using Matlab LanguageD'EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguagePas encore d'évaluation
- Solutions To Home Practice Test-5/Mathematics: Differential Calculus - 1 HWT - 1Document10 pagesSolutions To Home Practice Test-5/Mathematics: Differential Calculus - 1 HWT - 1varunkohliinPas encore d'évaluation
- Shake Them Haters off Volume 12: Mastering Your Mathematics Skills – the Study GuideD'EverandShake Them Haters off Volume 12: Mastering Your Mathematics Skills – the Study GuidePas encore d'évaluation
- Mid IDocument11 pagesMid IpassmefoolPas encore d'évaluation
- BT2 Revision Package Solutions (2008 Prelims)Document111 pagesBT2 Revision Package Solutions (2008 Prelims)gerwynngPas encore d'évaluation
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsD'EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Mi h2 Math Solutions p1Document10 pagesMi h2 Math Solutions p1jimmytanlimlongPas encore d'évaluation
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesD'EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesPas encore d'évaluation
- HCI H2 Maths 2012 Prelim P1 SolutionsDocument12 pagesHCI H2 Maths 2012 Prelim P1 Solutionsnej200695Pas encore d'évaluation
- 2007 YJC Paper 1solDocument12 pages2007 YJC Paper 1solYudi KhoPas encore d'évaluation
- AJC JC 2 H2 Maths 2011 Mid Year Exam Solutions Paper 1Document12 pagesAJC JC 2 H2 Maths 2011 Mid Year Exam Solutions Paper 1jimmytanlimlongPas encore d'évaluation
- 2013 - 2014 H2 Maths JJC Promo SolnsDocument11 pages2013 - 2014 H2 Maths JJC Promo SolnsLionel Torres LeePas encore d'évaluation
- F C D I: Jesús Rubí MirandaDocument2 pagesF C D I: Jesús Rubí Mirandalmarobesg94Pas encore d'évaluation
- One Mark For Each Intercept Down Ward.: A A X yDocument14 pagesOne Mark For Each Intercept Down Ward.: A A X yKarabo MailulaPas encore d'évaluation
- Exam 2solutionDocument5 pagesExam 2solutionJames Steven HaneyPas encore d'évaluation
- Rvhs h2 Math p1 SolutionsDocument13 pagesRvhs h2 Math p1 SolutionsjimmytanlimlongPas encore d'évaluation
- QN Solution 1: H2 Math Paper 1Document11 pagesQN Solution 1: H2 Math Paper 1Alex SoonPas encore d'évaluation
- AJC H2 Math 2013 Prelim P1 SolutionsDocument15 pagesAJC H2 Math 2013 Prelim P1 Solutionsnej200695Pas encore d'évaluation
- MJC JC 2 H2 Maths 2011 Mid Year Exam Solutions Paper 1Document22 pagesMJC JC 2 H2 Maths 2011 Mid Year Exam Solutions Paper 1jimmytanlimlongPas encore d'évaluation
- EGM6341 Sol HW 01Document22 pagesEGM6341 Sol HW 01Redmond R. ShamshiriPas encore d'évaluation
- (3x) (1+ 1 3x) 1 2 3x + 1 2 (1 2 1) 2 (1 3x) + ...... ) (3x) + 1 2 (3x) 1 8 (3x) + ......Document10 pages(3x) (1+ 1 3x) 1 2 3x + 1 2 (1 2 1) 2 (1 3x) + ...... ) (3x) + 1 2 (3x) 1 8 (3x) + ......Matthew ShiaPas encore d'évaluation
- 2006 AJC H2 MY SolnDocument9 pages2006 AJC H2 MY Solnjunie9201Pas encore d'évaluation
- NYJC JC 2 H2 Maths 2011 Mid Year Exam Solutions Paper 1Document10 pagesNYJC JC 2 H2 Maths 2011 Mid Year Exam Solutions Paper 1jimmytanlimlongPas encore d'évaluation
- Resenja Zadataka 30.6.2009 inDocument9 pagesResenja Zadataka 30.6.2009 inVanja MaricPas encore d'évaluation
- Secondary 3 Additional Mathematics Chapter 2 Unit 2.1 To 2.5Document10 pagesSecondary 3 Additional Mathematics Chapter 2 Unit 2.1 To 2.5sqhaaPas encore d'évaluation
- Nyjc h2 Math p1 SolutionDocument10 pagesNyjc h2 Math p1 SolutionjimmytanlimlongPas encore d'évaluation
- Paper B SolutionDocument11 pagesPaper B SolutiontimchanymPas encore d'évaluation
- Root Finding:: X X D D X X D X XDocument3 pagesRoot Finding:: X X D D X X D X Xyana22Pas encore d'évaluation
- MATLAB FormulasDocument3 pagesMATLAB FormulasRoberto Alessandro IonescuPas encore d'évaluation
- ACJC 2014 H2 Maths Supp Exam (Solution For Students)Document9 pagesACJC 2014 H2 Maths Supp Exam (Solution For Students)RaymondZhangPas encore d'évaluation
- 2012 ACJC Prelim H2 Math SolnDocument15 pages2012 ACJC Prelim H2 Math Solnckhowh_23284524667% (3)
- NJC JC 2 H2 Maths 2011 Mid Year Exam SolutionsDocument10 pagesNJC JC 2 H2 Maths 2011 Mid Year Exam SolutionsjimmytanlimlongPas encore d'évaluation
- Implement Ac I OnDocument26 pagesImplement Ac I OnMaria GreenPas encore d'évaluation
- Dhs h2 Math p1 SolutionDocument11 pagesDhs h2 Math p1 SolutionjimmytanlimlongPas encore d'évaluation
- 2011 Set B Mock Paper 1 SolutionsDocument15 pages2011 Set B Mock Paper 1 SolutionsJordan TiongPas encore d'évaluation
- IntegralDocument12 pagesIntegralMarcelo SimbañaPas encore d'évaluation
- Valor Absoluto - Analisis Matematico 1Document23 pagesValor Absoluto - Analisis Matematico 1Carlos Alberto Ramirez FernandezPas encore d'évaluation
- Advanced Engineering Mathematics PresentationDocument145 pagesAdvanced Engineering Mathematics Presentationreborn2100% (2)
- X X X X X X X X X X X X X: Sin Lim 4 1 3 1 2 1 3 Sin 3 1 2 2 Sin 2 1 Lim 3 Sin 1 2 Sin 1 Lim: 3 Sin 2 Sin Lim - 1Document5 pagesX X X X X X X X X X X X X: Sin Lim 4 1 3 1 2 1 3 Sin 3 1 2 2 Sin 2 1 Lim 3 Sin 1 2 Sin 1 Lim: 3 Sin 2 Sin Lim - 1Albina ImamovicPas encore d'évaluation
- RT Solutions-Practice Test Papers XIII VXY 1 To 6 SolDocument40 pagesRT Solutions-Practice Test Papers XIII VXY 1 To 6 Solvishal110085Pas encore d'évaluation
- StepenovanjeDocument7 pagesStepenovanjerage_bubblegumPas encore d'évaluation
- Ath em Ati CS: L.K .SH Arm ADocument5 pagesAth em Ati CS: L.K .SH Arm APremPas encore d'évaluation
- 10 Definite IntegrationDocument36 pages10 Definite IntegrationaiklussPas encore d'évaluation
- Load Flow - 3 - 2Document13 pagesLoad Flow - 3 - 2rauf2063036Pas encore d'évaluation
- Sajc 2010 Prelim Math p1 SolnDocument10 pagesSajc 2010 Prelim Math p1 SolnAh XiuPas encore d'évaluation
- Ath em Ati CS: L.K .SH Arm ADocument10 pagesAth em Ati CS: L.K .SH Arm APremPas encore d'évaluation
- JC2 Prelim H2 Math Solution Paper 1Document10 pagesJC2 Prelim H2 Math Solution Paper 1Huixin LimPas encore d'évaluation
- Yjc h2 Math p1 SolutionsDocument12 pagesYjc h2 Math p1 SolutionsjimmytanlimlongPas encore d'évaluation
- 2008 Ext1 PDFDocument3 pages2008 Ext1 PDFBrandi RosePas encore d'évaluation
- Ajc h2 Math p1 SolutionsDocument15 pagesAjc h2 Math p1 SolutionsjimmytanlimlongPas encore d'évaluation
- Answers For Chapter 13Document51 pagesAnswers For Chapter 13karensheuPas encore d'évaluation
- 1 StepenovanjeDocument7 pages1 StepenovanjeDanijela BanjevicPas encore d'évaluation
- Inequation & Equation Solutions FinalDocument67 pagesInequation & Equation Solutions FinalAkshay PatelPas encore d'évaluation
- RVHS JC 2 H2 Maths 2011 Mid Year Exam SolutionsDocument14 pagesRVHS JC 2 H2 Maths 2011 Mid Year Exam SolutionsjimmytanlimlongPas encore d'évaluation
- Max Allowable Pressure of Pipes and Pipellines CER 04022013 1 (V. S. Kumar Unprotected)Document106 pagesMax Allowable Pressure of Pipes and Pipellines CER 04022013 1 (V. S. Kumar Unprotected)Vashish Ramrecha100% (1)
- Steel Beam BS 5950Document17 pagesSteel Beam BS 5950Vashish RamrechaPas encore d'évaluation
- ISA SymbolsDocument1 pageISA SymbolsmustafasandikciPas encore d'évaluation
- Piping FormulaeDocument9 pagesPiping FormulaeVashish RamrechaPas encore d'évaluation
- In-Text: (Nickerson and Buist, 2008) Bibliography: Nickerson, D. and Buist, M. (2008) - Practical Application of Cellml 1.1: The IntegrationDocument1 pageIn-Text: (Nickerson and Buist, 2008) Bibliography: Nickerson, D. and Buist, M. (2008) - Practical Application of Cellml 1.1: The IntegrationVashish RamrechaPas encore d'évaluation
- Gantt ChartDocument6 pagesGantt ChartVashish RamrechaPas encore d'évaluation
- Steel Cals SimpleDocument53 pagesSteel Cals SimpleVashish RamrechaPas encore d'évaluation
- The Gurney Flap: A Case Study: 1.1 Issues in Wing DesignDocument9 pagesThe Gurney Flap: A Case Study: 1.1 Issues in Wing DesignVashish RamrechaPas encore d'évaluation
- CH-4 Shells Under External PressureDocument64 pagesCH-4 Shells Under External PressureVashish RamrechaPas encore d'évaluation
- Legacy ECSA ProfEng Appform TESDocument1 pageLegacy ECSA ProfEng Appform TESVashish RamrechaPas encore d'évaluation
- Pressure-Volume Loops: Feasible For The Evaluation of Right Ventricular Function in An Experimental Model of Acute Pulmonary Regurgitation?Document6 pagesPressure-Volume Loops: Feasible For The Evaluation of Right Ventricular Function in An Experimental Model of Acute Pulmonary Regurgitation?Vashish RamrechaPas encore d'évaluation
- Roll 2015Document26 pagesRoll 2015Vashish RamrechaPas encore d'évaluation
- E C S A: DeclarationDocument1 pageE C S A: DeclarationVashish RamrechaPas encore d'évaluation
- 4.2d - 4.6bDocument21 pages4.2d - 4.6bVashish RamrechaPas encore d'évaluation
- Development of A SemiDocument4 pagesDevelopment of A SemiVashish RamrechaPas encore d'évaluation
- Formula Sheet 2007Document3 pagesFormula Sheet 2007Vashish RamrechaPas encore d'évaluation
- Nations Cup TimetableDocument60 pagesNations Cup TimetableVashish RamrechaPas encore d'évaluation
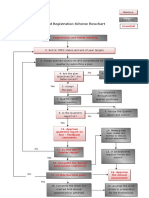
- SRS Flowchart of ProcessDocument1 pageSRS Flowchart of ProcessVashish RamrechaPas encore d'évaluation
- Validation Plan TemplateDocument7 pagesValidation Plan Templatevapaps100% (1)
- Guide Installation - DVR ENDSS-R4D8 PDFDocument16 pagesGuide Installation - DVR ENDSS-R4D8 PDFjavis0Pas encore d'évaluation
- PL SQL Interview Questions and AnswersDocument3 pagesPL SQL Interview Questions and AnswersatoztargetPas encore d'évaluation
- Presentation On Hacking and CrackingDocument15 pagesPresentation On Hacking and CrackingsrinivasPas encore d'évaluation
- Incident Response Plan (Template)Document17 pagesIncident Response Plan (Template)Gerardo RGLPas encore d'évaluation
- Cisco VPN Client Admin GuideDocument236 pagesCisco VPN Client Admin GuidebthyarionPas encore d'évaluation
- Idenfy Pitch Deck For InvestorsDocument10 pagesIdenfy Pitch Deck For InvestorsDomantas CiuldePas encore d'évaluation
- DeptDocument161 pagesDeptyes1nthPas encore d'évaluation
- Bicsi SP 2013 Ip Based Security For Data Centres Barney Tomasich - Monday 18 March 2013Document51 pagesBicsi SP 2013 Ip Based Security For Data Centres Barney Tomasich - Monday 18 March 2013Freddy VergaraPas encore d'évaluation
- Pat Cadigan - SynnersDocument588 pagesPat Cadigan - Synnersrebel_nerd_cloudPas encore d'évaluation
- AMIGA - Big Red Adventure (AGA CD-ROM) ManualDocument3 pagesAMIGA - Big Red Adventure (AGA CD-ROM) ManualjajagaborPas encore d'évaluation
- Biometric Voting SystemDocument18 pagesBiometric Voting SystemAnupriya SaxenaPas encore d'évaluation
- Module 7 AssignmentDocument13 pagesModule 7 Assignmentapi-360051483Pas encore d'évaluation
- Slide About CRIME Attack On TLS at Ekoparty 2012Document43 pagesSlide About CRIME Attack On TLS at Ekoparty 2012nguyenvodichPas encore d'évaluation
- GP2 1 1FAQList1 3Document30 pagesGP2 1 1FAQList1 3Den Maz PoerPas encore d'évaluation
- MENA CISO Summit 2018 - Event Brochure-UpdatedDocument8 pagesMENA CISO Summit 2018 - Event Brochure-UpdatedMeghana VyasPas encore d'évaluation
- Data Privacy Act AwarenessDocument39 pagesData Privacy Act AwarenessIya Nicole LoPas encore d'évaluation
- Using PL/SQL Code To Activate Navigation ButtonsDocument2 pagesUsing PL/SQL Code To Activate Navigation ButtonsNicoleta BordeianuPas encore d'évaluation
- Online Lab 1-Mystery of The Switched CDDocument3 pagesOnline Lab 1-Mystery of The Switched CDmoniquePas encore d'évaluation
- US Senate: A "Kill Chain" Analysis of The 2013 Target Data BreachDocument18 pagesUS Senate: A "Kill Chain" Analysis of The 2013 Target Data BreachJason I. PobletePas encore d'évaluation
- Introduction To Cyber SecurityDocument20 pagesIntroduction To Cyber SecurityFahad Ali ChandioPas encore d'évaluation
- SRS - City PoliceDocument20 pagesSRS - City PoliceAafi QaisarPas encore d'évaluation
- ADAIS-SWOT AnalysisDocument3 pagesADAIS-SWOT AnalysisNor FarahPas encore d'évaluation
- iCEnhancer ReadMeDocument3 pagesiCEnhancer ReadMeJessica TaylorPas encore d'évaluation
- 308 Information System Audit PDFDocument3 pages308 Information System Audit PDFyn sagala0% (1)
- PineApp OSG Anti-Spam Engines & ValuesDocument7 pagesPineApp OSG Anti-Spam Engines & Valuesfinaltoheaven1Pas encore d'évaluation
- RCMP Drone Privacy Impact AssessmentDocument33 pagesRCMP Drone Privacy Impact AssessmentNational Security Oversight Institute of CanadaPas encore d'évaluation
- CT Manager: Job Objective: Duties and ResponsibilitiesDocument4 pagesCT Manager: Job Objective: Duties and Responsibilities71177335Pas encore d'évaluation
- The Kangra Central Co-Operative Bank LTD.: H.O. Dharamshala, Distt. Kangra (H.P.) - 176 215Document5 pagesThe Kangra Central Co-Operative Bank LTD.: H.O. Dharamshala, Distt. Kangra (H.P.) - 176 215MukulPas encore d'évaluation
- Errors in Elementary Linear AlgebraDocument2 pagesErrors in Elementary Linear Algebrajaved shaikh chaandPas encore d'évaluation