Vous aimerez peut-être aussi
- Material Safety Sheet DataENERTRADE 2016Document5 pagesMaterial Safety Sheet DataENERTRADE 2016Alejandro MartinezPas encore d'évaluation
- Practica Amplificador Operacional PDFDocument4 pagesPractica Amplificador Operacional PDFAlejandro MartinezPas encore d'évaluation
- Conmutacion Mecanicca Vs ElectronicaDocument6 pagesConmutacion Mecanicca Vs ElectronicaAlejandro MartinezPas encore d'évaluation
- Ecuaciones en DiferenciasDocument6 pagesEcuaciones en DiferenciasAlejandro MartinezPas encore d'évaluation
- Programa de Mantenimiento Preventivo Planta TexcocoDocument10 pagesPrograma de Mantenimiento Preventivo Planta TexcocoAlejandro MartinezPas encore d'évaluation
- Taller CVDocument35 pagesTaller CVKarla ViverosPas encore d'évaluation
- CLASE 1 Objetivo, TemasDocument7 pagesCLASE 1 Objetivo, TemasAlejandro MartinezPas encore d'évaluation
- Normas IEEE 802Document3 pagesNormas IEEE 802josepalacio30Pas encore d'évaluation
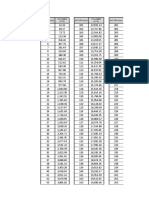
- Tabla de Cubicacion para Tanque de 30 Mil LitrosDocument5 pagesTabla de Cubicacion para Tanque de 30 Mil LitrosAlejandro Martinez50% (2)
- Clase 6 Sistemas Analogos Mecanicos ElectricosDocument6 pagesClase 6 Sistemas Analogos Mecanicos ElectricosAlejandro MartinezPas encore d'évaluation
- Normas Aplicables A Cableados EstructuradosDocument4 pagesNormas Aplicables A Cableados EstructuradosAlejandro MartinezPas encore d'évaluation
- Problemas Resueltos Poleas - Engranajes - AkalDocument5 pagesProblemas Resueltos Poleas - Engranajes - AkalJavier Oyarce50% (6)
- Tabla Peso CaabsaDocument4 pagesTabla Peso CaabsaAlejandro MartinezPas encore d'évaluation
- Variables A Medir en Un Sistema de ControlDocument29 pagesVariables A Medir en Un Sistema de ControlAlejandro MartinezPas encore d'évaluation
- Clase 1 Introduccion MecatronicaDocument11 pagesClase 1 Introduccion MecatronicaAlejandro MartinezPas encore d'évaluation
- Dimension Tanque 50,000 LtsDocument1 pageDimension Tanque 50,000 LtsAlejandro MartinezPas encore d'évaluation
- Ejercicios Tipo ExamenDocument7 pagesEjercicios Tipo ExamenAlejandro MartinezPas encore d'évaluation
- Bunca - IluminacionDocument59 pagesBunca - IluminacionmonteroshopPas encore d'évaluation
- Introducción de TesisDocument4 pagesIntroducción de TesisAlejandro MartinezPas encore d'évaluation
- PLCDocument14 pagesPLCAlf Toys PilaresPas encore d'évaluation
- Tema 7Document11 pagesTema 7Carlos H BolañosPas encore d'évaluation
- Conceptos de AutomatizacionDocument45 pagesConceptos de AutomatizacionAlejandro MartinezPas encore d'évaluation
- Motor EsDocument13 pagesMotor EsAlejandro MartinezPas encore d'évaluation
- RAREPASODocument121 pagesRAREPASOCharly Dan SottilePas encore d'évaluation
- Modelos de SISTEMAS FluidosDocument12 pagesModelos de SISTEMAS FluidosAlejandro MartinezPas encore d'évaluation
- Instrumentacion y ControlDocument175 pagesInstrumentacion y ControlAlejandro MartinezPas encore d'évaluation
- Apuntes de AutomatismosDocument268 pagesApuntes de Automatismosaligatore82100% (1)
- BanderasDocument2 pagesBanderasAlejandro MartinezPas encore d'évaluation
- Guia E-A Trigo Jornada Mañana - Septiembre-10ºDocument7 pagesGuia E-A Trigo Jornada Mañana - Septiembre-10ºDayani Mora LealPas encore d'évaluation
- Memoria de CálculoDocument5 pagesMemoria de CálculoVictor Hugo ChoquePas encore d'évaluation
- Algebra Lineal ROSARIO URIBE MARQUEZDocument9 pagesAlgebra Lineal ROSARIO URIBE MARQUEZPierina NorabuenaPas encore d'évaluation
- Criterios de SoldaduraDocument4 pagesCriterios de SoldaduracaterpillardosPas encore d'évaluation
- Practica 02 Inercia Rotacional de Una Esfera SolidaDocument5 pagesPractica 02 Inercia Rotacional de Una Esfera Solidadavidsantana96Pas encore d'évaluation
- Practica de Laboratorio #1Document9 pagesPractica de Laboratorio #1Laura DsbPas encore d'évaluation
- Polarizacion y Recta de CargaDocument23 pagesPolarizacion y Recta de CargaOscar Antonio Sanchez Rodriguez0% (1)
- INFOGRAFÍADocument12 pagesINFOGRAFÍAasistente1.coprintexPas encore d'évaluation
- Sonido ProfesionalDocument11 pagesSonido Profesionaldjshanti100% (2)
- Cómo Hacer Un Informe de LaboratorioDocument10 pagesCómo Hacer Un Informe de LaboratorioIz RemyPas encore d'évaluation
- Taller DestilaciónDocument3 pagesTaller DestilaciónDaniela MontenegroPas encore d'évaluation
- Silabus de TermodinámicaDocument9 pagesSilabus de TermodinámicaJavier EsquivelPas encore d'évaluation
- 1.1.2muros Estructuras RigidasDocument35 pages1.1.2muros Estructuras RigidasJose Antonio Paredes VeraPas encore d'évaluation
- Series y Series de PotenciaDocument11 pagesSeries y Series de PotenciamayliPas encore d'évaluation
- San Agustin de Hipona Maestro de La Conciencia de OccidenteDocument4 pagesSan Agustin de Hipona Maestro de La Conciencia de OccidenteBRAYNSEVILLLAPas encore d'évaluation
- Introduccion A La TermodinamicaDocument44 pagesIntroduccion A La TermodinamicaAdrian AllenPas encore d'évaluation
- Fuerzas Diversas en EquilibrioDocument3 pagesFuerzas Diversas en Equilibrioalain garciaPas encore d'évaluation
- Cap16 Diseño Por Fuerza CortanteDocument62 pagesCap16 Diseño Por Fuerza CortanteSthefanny Reyes GomezPas encore d'évaluation
- Reciclado de Materiales Refractarios Utilizados en La SiderurgiaDocument11 pagesReciclado de Materiales Refractarios Utilizados en La Siderurgiafrank0% (1)
- Practica No.1 (Lab. Control Electromecánico)Document10 pagesPractica No.1 (Lab. Control Electromecánico)Alexis MuñozPas encore d'évaluation
- Apuntes Taller de Fotografía Digital (1 Parte)Document10 pagesApuntes Taller de Fotografía Digital (1 Parte)AlekSnchezPas encore d'évaluation
- Guia de Erjercicios MRU-MRUVDocument1 pageGuia de Erjercicios MRU-MRUVKaterin RiveroPas encore d'évaluation
- Guía para El Desarrollo Del Trabajo Práctico - Poligonal Cerrada Acimut DirectoDocument9 pagesGuía para El Desarrollo Del Trabajo Práctico - Poligonal Cerrada Acimut DirectowilmerPas encore d'évaluation
- CaratulaDocument17 pagesCaratulaManuel J. GoPas encore d'évaluation
- Quim 01Document2 pagesQuim 01viterick100% (1)
- Deformaciones en Geologia EstructuralDocument48 pagesDeformaciones en Geologia EstructuralRichard Anthony Aylas LucanoPas encore d'évaluation
- EsferaDocument4 pagesEsferaCarlos SanchezPas encore d'évaluation
- Esfuerzo DobladoDocument2 pagesEsfuerzo DobladoLuis Felipe FloresPas encore d'évaluation
- Fase 1 - Conocimientos PreviosDocument6 pagesFase 1 - Conocimientos PreviosLedherzon ContrerasPas encore d'évaluation
- Bes-0105-Bol Realización Del Site SurveyDocument4 pagesBes-0105-Bol Realización Del Site Surveymoussa05Pas encore d'évaluation