Vous aimerez peut-être aussi
- It64 Embedded Systems: Marthandam College of Engineering and TechnologyDocument18 pagesIt64 Embedded Systems: Marthandam College of Engineering and TechnologyJoshua DuffyPas encore d'évaluation
- Computer Architecture Quick NotesDocument2 pagesComputer Architecture Quick NotesAgrippa MungaziPas encore d'évaluation
- Prepared by Dasun Nilanjana ForDocument24 pagesPrepared by Dasun Nilanjana ForKeshila JayasooriyaPas encore d'évaluation
- Embedded System Question BankDocument12 pagesEmbedded System Question BankSanthosh KumarPas encore d'évaluation
- Question BankDocument12 pagesQuestion BankSanthosh KumarPas encore d'évaluation
- COE381 Microprocessors Marking Scheame: Q1 (A) - Write Explanatory Note On General-Purpose ComputersDocument6 pagesCOE381 Microprocessors Marking Scheame: Q1 (A) - Write Explanatory Note On General-Purpose ComputersEric Leo AsiamahPas encore d'évaluation
- Potential Transformer: FaultDocument8 pagesPotential Transformer: FaulttdhinakaranPas encore d'évaluation
- Ec8791 - Embedded and Real Time Systems Year / Sem: Iv / 07Document12 pagesEc8791 - Embedded and Real Time Systems Year / Sem: Iv / 07Vinothkumar UrumanPas encore d'évaluation
- IO SystemsDocument53 pagesIO SystemsNhungPas encore d'évaluation
- Department of Computer Science and Engineering Question BankDocument18 pagesDepartment of Computer Science and Engineering Question Bankanand_duraiswamyPas encore d'évaluation
- 9 Intelligent InstrumentsDocument45 pages9 Intelligent InstrumentsAli Ahmad100% (1)
- IO SystemsDocument41 pagesIO SystemsPark DylanPas encore d'évaluation
- PIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byDocument7 pagesPIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byNeeraj KarnaniPas encore d'évaluation
- What Is Microcontroller?Document119 pagesWhat Is Microcontroller?Vishal Gudla NagrajPas encore d'évaluation
- C and C++ and Embedded C Questions: Control System Signal Phase Electronic Circuit Oscillator Phase DetectorDocument2 pagesC and C++ and Embedded C Questions: Control System Signal Phase Electronic Circuit Oscillator Phase DetectorKhaled YasserPas encore d'évaluation
- Erts Unit 2 2022Document45 pagesErts Unit 2 2022mohanadevi chandrasekarPas encore d'évaluation
- 502 Reflection 2Document5 pages502 Reflection 2Brahmendra UpputuriPas encore d'évaluation
- Group ReportsDocument7 pagesGroup ReportsMark SolisPas encore d'évaluation
- Evolution of ComputersDocument11 pagesEvolution of ComputersRajarshi Ghose DastidarPas encore d'évaluation
- Itec 100 ch7Document42 pagesItec 100 ch7HasPas encore d'évaluation
- Computer Orgn 230428 235533Document10 pagesComputer Orgn 230428 235533Arathi SuryaramananPas encore d'évaluation
- 352 All - Operating System 2 SECTION # - 474 & 475: Chapter 3 - I/O SystemsDocument21 pages352 All - Operating System 2 SECTION # - 474 & 475: Chapter 3 - I/O Systemsنجلا الشهريPas encore d'évaluation
- Topic: Introduction To Computer NetworksDocument12 pagesTopic: Introduction To Computer NetworksMostafa HassanPas encore d'évaluation
- Computer StructureDocument16 pagesComputer Structuresamuel ceasarPas encore d'évaluation
- Dream 6800 Glossary ... : (Or Language) : The Binary Numeric Form ofDocument1 pageDream 6800 Glossary ... : (Or Language) : The Binary Numeric Form ofHernan BenitesPas encore d'évaluation
- Networking Basics Notes - v2Document45 pagesNetworking Basics Notes - v2Gherasa Marius BogdanPas encore d'évaluation
- Top 18 Embedded Systems Interview Questions PDFDocument9 pagesTop 18 Embedded Systems Interview Questions PDFMehul PatelPas encore d'évaluation
- Computer Organization Short-1Document5 pagesComputer Organization Short-1veyide7506Pas encore d'évaluation
- Embedded Systems Components Part II: LessonDocument14 pagesEmbedded Systems Components Part II: LessonSayan Kumar KhanPas encore d'évaluation
- Draw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerDocument7 pagesDraw The Block Diagram of Von Neumann Architecture and Explain About Its Parts in Brief AnswerhayerpaPas encore d'évaluation
- 周志遠教授作業系統 - chap13Operating System Chap13 IO Systems_Document39 pages周志遠教授作業系統 - chap13Operating System Chap13 IO Systems_dukePas encore d'évaluation
- Chapter 2 Embedded MicrocontrollersDocument5 pagesChapter 2 Embedded MicrocontrollersyishakPas encore d'évaluation
- ARM Processor CoreDocument34 pagesARM Processor CorevarshaksPas encore d'évaluation
- Embedded System and IoTDocument9 pagesEmbedded System and IoTNitysPas encore d'évaluation
- Important Two Marks - AvionicsDocument11 pagesImportant Two Marks - AvionicsArif Abdul Rahman0% (1)
- Microprocessors and MicrocontrollerDocument18 pagesMicroprocessors and Microcontrollerrajesh.shirwal382Pas encore d'évaluation
- Hardware: Hardware For I/O - OverviewDocument17 pagesHardware: Hardware For I/O - Overviewosmanatam1Pas encore d'évaluation
- 2 Marks MPDocument15 pages2 Marks MPGopinathan MPas encore d'évaluation
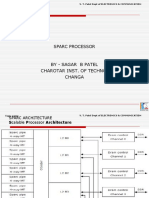
- Sparc Processor: by - Sagar B Patel Charotar Inst. of Techno. ChangaDocument24 pagesSparc Processor: by - Sagar B Patel Charotar Inst. of Techno. ChangaRavishah007Pas encore d'évaluation
- Question Bank-Microprocessor and ApplicaionDocument38 pagesQuestion Bank-Microprocessor and Applicaionchandrasekar100% (5)
- 05 Interfacing and CommunicationDocument57 pages05 Interfacing and Communication2022680924Pas encore d'évaluation
- Aca 2 Marks With AnswersDocument22 pagesAca 2 Marks With AnswersmenakadeviecePas encore d'évaluation
- Computer Architecture 2 MarksDocument32 pagesComputer Architecture 2 MarksArchanavgs0% (1)
- On Chip Periperals tm4c UNIT-IIDocument30 pagesOn Chip Periperals tm4c UNIT-IIK JahnaviPas encore d'évaluation
- Microprosser 8085Document15 pagesMicroprosser 8085saigdv1978Pas encore d'évaluation
- 1.6 Cpus: Programming Input and OutputDocument8 pages1.6 Cpus: Programming Input and OutputVijayaraghavan VPas encore d'évaluation
- CoDocument80 pagesCogdayanand4uPas encore d'évaluation
- EMISY Second Test Exemplary Questions Solved-3Document15 pagesEMISY Second Test Exemplary Questions Solved-3YANG LIUPas encore d'évaluation
- COADocument137 pagesCOAThonta DariPas encore d'évaluation
- Question No. - 1 (A) : SolutionDocument41 pagesQuestion No. - 1 (A) : SolutionShivangi Maheshwari100% (1)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.D'EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Pas encore d'évaluation
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960D'EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Pas encore d'évaluation
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationD'EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationPas encore d'évaluation
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksD'EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksPas encore d'évaluation
- Airbag Decision AlgorithmDocument7 pagesAirbag Decision AlgorithmGuilherme Lima SiqueiraPas encore d'évaluation
- Instrumentation and Measurement-Module 4Document24 pagesInstrumentation and Measurement-Module 4M Sohaib NayyarPas encore d'évaluation
- Low Strain Impact Integrity Testing of Deep Foundations: Standard Test Method ForDocument6 pagesLow Strain Impact Integrity Testing of Deep Foundations: Standard Test Method ForSFC ABHA 1100% (2)
- Kistler Accelerometer K-Beam 8212BDocument3 pagesKistler Accelerometer K-Beam 8212BherbertmgPas encore d'évaluation
- Bf1systems DigiTyre User Manual V1 02Document46 pagesBf1systems DigiTyre User Manual V1 02dPas encore d'évaluation
- Brochure VC-920 EN PDFDocument4 pagesBrochure VC-920 EN PDFAriawan HasnanPas encore d'évaluation
- Product Data: Piezoelectric Deltashear Accelerometers Uni-Gain, Deltatron and Special TypesDocument20 pagesProduct Data: Piezoelectric Deltashear Accelerometers Uni-Gain, Deltatron and Special Typesjhon vargasPas encore d'évaluation
- AvionicsDocument44 pagesAvionicsBeh Ming WeiPas encore d'évaluation
- Vibration Measurement Handbook MideDocument14 pagesVibration Measurement Handbook MideJason DrakePas encore d'évaluation
- CicretDocument38 pagesCicretK.Rohit GoudPas encore d'évaluation
- 3 Basics of Vibration Measurement by Torben LichtDocument138 pages3 Basics of Vibration Measurement by Torben LichtDragan LazicPas encore d'évaluation
- Do - 037 - s2016 Testing of Bored PilesDocument13 pagesDo - 037 - s2016 Testing of Bored PilesrubydelacruzPas encore d'évaluation
- Ubc 2008 Fall Kannan AkilaDocument149 pagesUbc 2008 Fall Kannan AkilaPitt KimPas encore d'évaluation
- Using Smartphones To Detect Car Accidents and Provide Situational Awareness To Emergency RespondersDocument14 pagesUsing Smartphones To Detect Car Accidents and Provide Situational Awareness To Emergency RespondersSanthana KrishnanPas encore d'évaluation
- Computer Based Wireless Automobile Wheel Alignment System Using AccelerometerDocument8 pagesComputer Based Wireless Automobile Wheel Alignment System Using AccelerometertheijesPas encore d'évaluation
- Types of Robot SensorsDocument8 pagesTypes of Robot Sensorsmd anik hasanPas encore d'évaluation
- SV 106 Human Vibration Meter & Analyser: FeaturesDocument2 pagesSV 106 Human Vibration Meter & Analyser: FeaturessalekojicPas encore d'évaluation
- VIBER X1™ ManualDocument20 pagesVIBER X1™ ManualWilderQuispePerezPas encore d'évaluation
- Analisis de Vibraciones SKFDocument118 pagesAnalisis de Vibraciones SKFJose EsquedaPas encore d'évaluation
- Presentation AuraDocument15 pagesPresentation AuraShivam YadavPas encore d'évaluation
- International Roughness Index Specifications Around The WorldDocument39 pagesInternational Roughness Index Specifications Around The WorldPredriksonPas encore d'évaluation
- Guided Missiles - DRDODocument90 pagesGuided Missiles - DRDODevanand T Santha0% (1)
- ld353 Um enDocument16 pagesld353 Um enIuliu TominPas encore d'évaluation
- Different Types of Sensors and Their WorkingDocument12 pagesDifferent Types of Sensors and Their WorkingTariq ZuhlufPas encore d'évaluation
- High Performance Inertial Navigation Grade Sigma-Delta MEMS AccelerometerDocument24 pagesHigh Performance Inertial Navigation Grade Sigma-Delta MEMS AccelerometerRaul RosaPas encore d'évaluation
- PT2060 Monitor: PVTVM, IncDocument69 pagesPT2060 Monitor: PVTVM, Incnino16041973Pas encore d'évaluation
- Model 601A02 Low-Cost Industrial ICP® Accelerometer Installation and Operating ManualDocument19 pagesModel 601A02 Low-Cost Industrial ICP® Accelerometer Installation and Operating ManualQ Llanos HenryPas encore d'évaluation
- Imi 660 0707Document4 pagesImi 660 0707Tim StubbsPas encore d'évaluation
- Shake Table II User ManualDocument36 pagesShake Table II User ManualMgn SanPas encore d'évaluation
- 2012 Smartphone Psychology ManifestoDocument18 pages2012 Smartphone Psychology ManifestoFernando BordignonPas encore d'évaluation