Vous aimerez peut-être aussi
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- List of Top Companies in IndiaDocument133 pagesList of Top Companies in IndiaSathish Holla0% (1)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- AUTOSAR TR ReleaseOverviewAndRevHistoryDocument49 pagesAUTOSAR TR ReleaseOverviewAndRevHistorySiddu Shiva KadiwalPas encore d'évaluation
- Matlab QuestionsDocument3 pagesMatlab QuestionsSiddu Shiva KadiwalPas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Touching Story of An Indian Software EngineerDocument2 pagesTouching Story of An Indian Software Engineertsudhakar99Pas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- HR Professionals QualitiesDocument1 pageHR Professionals QualitiesSiddu Shiva KadiwalPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- A Small Touching Story Mainly For Professionals..Document5 pagesA Small Touching Story Mainly For Professionals..Siddu Shiva KadiwalPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Good BookDocument4 pagesGood BookSiddu Shiva KadiwalPas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Nasscom Black Listed CompaniesDocument8 pagesNasscom Black Listed CompaniesSiddu Shiva KadiwalPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- List of Top Companies in IndiaDocument133 pagesList of Top Companies in IndiaSathish Holla0% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Toyota Way by John ShookDocument50 pagesThe Toyota Way by John Shookmehul36850% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Business Sutra by Devdutt PattanaikDocument28 pagesBusiness Sutra by Devdutt Pattanaikgautamsaraswat100% (3)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- MimoDocument6 pagesMimoSiddu Shiva KadiwalPas encore d'évaluation
- Mat Lab Interview QuestionsDocument2 pagesMat Lab Interview QuestionsSiddu Shiva KadiwalPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- 78.CAN Based Accident Avoidance System Using LPC2129Document3 pages78.CAN Based Accident Avoidance System Using LPC2129Siddu Shiva KadiwalPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- IEEE WCNC 2011 To Explore Latest Advancements in Wireless Communications & NetworkingDocument3 pagesIEEE WCNC 2011 To Explore Latest Advancements in Wireless Communications & NetworkingPR.com 2Pas encore d'évaluation
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- MATLAB IntervqstnDocument10 pagesMATLAB IntervqstnSiddu Shiva KadiwalPas encore d'évaluation
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Vtu-Guidelines For The Preparation of B.tech-ReportDocument6 pagesVtu-Guidelines For The Preparation of B.tech-ReportAchyut JamadagniPas encore d'évaluation
- Handbook of Taiwanese RomanizationDocument221 pagesHandbook of Taiwanese RomanizationAhmd AlfPas encore d'évaluation
- Quick Start GuideDocument9 pagesQuick Start GuidePeter WraightPas encore d'évaluation
- Lesson 8 - Paris Anthology OverviewDocument8 pagesLesson 8 - Paris Anthology OverviewIsha Javed Year 13Pas encore d'évaluation
- Dewi Noviyanti FitkDocument81 pagesDewi Noviyanti FitkReinaldus Aton 12118023Pas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Acta Martyrum (Balestri, Hyvernat, Eds.) - 1907. Volume 1.Document426 pagesActa Martyrum (Balestri, Hyvernat, Eds.) - 1907. Volume 1.Patrologia Latina, Graeca et Orientalis100% (1)
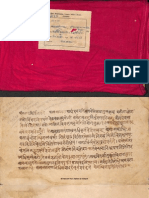
- Yoga Sutra With Sankhya Bhashya Alm 28 SHLF 2 6230 Devanagari - PatanjaliDocument131 pagesYoga Sutra With Sankhya Bhashya Alm 28 SHLF 2 6230 Devanagari - PatanjaliindicmanuscriptsPas encore d'évaluation
- 5000 IpsDocument2 pages5000 IpseleriPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- 21st Pre Colonial PeriodDocument9 pages21st Pre Colonial PeriodANT0N1OPas encore d'évaluation
- Maths III Transform & Disrete PDFDocument3 pagesMaths III Transform & Disrete PDFDeepak sharmaPas encore d'évaluation
- Furuno NX700 Service Manual (SME-56490-A3) PDFDocument144 pagesFuruno NX700 Service Manual (SME-56490-A3) PDFmrservice7782Pas encore d'évaluation
- Conflict Across CulturesDocument15 pagesConflict Across CulturesAnkaj MohindrooPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (120)
- How To Create Web To Lead Forms in Salesforce - Lead ManagementDocument4 pagesHow To Create Web To Lead Forms in Salesforce - Lead Managementdevi dasPas encore d'évaluation
- 8085 InterruptsDocument8 pages8085 InterruptsCharles SamuelPas encore d'évaluation
- Hajime Furukawa Resume 11/2012Document1 pageHajime Furukawa Resume 11/2012Hajime FurukawaPas encore d'évaluation
- The Living Icon in Byzantium and Italy The Vita Image Eleventh To Thirteenth CenturiesDocument301 pagesThe Living Icon in Byzantium and Italy The Vita Image Eleventh To Thirteenth Centurieszoran ivkovic100% (4)
- Penny Colman - Thanksgiving: The True Story - Readers' GuideDocument2 pagesPenny Colman - Thanksgiving: The True Story - Readers' GuidenaygritaPas encore d'évaluation
- The Tale of The Man of Lawe 1000059498 PDFDocument340 pagesThe Tale of The Man of Lawe 1000059498 PDFjurebiePas encore d'évaluation
- All The Allegation Leveled Against Him Were Found To Be BaselessDocument3 pagesAll The Allegation Leveled Against Him Were Found To Be Baselesssamuel kebedePas encore d'évaluation
- John Fraser Jan 5th 2020 Rev3 PDFDocument2 pagesJohn Fraser Jan 5th 2020 Rev3 PDFapi-300781429Pas encore d'évaluation
- Analisis Sejarah Terjemah Al-Qur'an Di InggrisDocument19 pagesAnalisis Sejarah Terjemah Al-Qur'an Di Inggriswahyudi salmanPas encore d'évaluation
- Javascript PDFDocument22 pagesJavascript PDFJothimani Murugesan KPas encore d'évaluation
- The Semantic Red Effect: Processing The Word Red Undermines Intellectual PerformanceDocument12 pagesThe Semantic Red Effect: Processing The Word Red Undermines Intellectual PerformanceWwwanand111Pas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Error Analysis Perspectives On Second Language Acquisition PDFDocument2 pagesError Analysis Perspectives On Second Language Acquisition PDFPatricia50% (4)
- Lesson 3 - Business Case and Technical ValidationDocument19 pagesLesson 3 - Business Case and Technical ValidationVicente MirandaPas encore d'évaluation
- Git CommandsDocument10 pagesGit CommandsbanuPas encore d'évaluation
- 108 Names of Lord VishnuDocument35 pages108 Names of Lord VishnuVastuAcharya Maanoj0% (1)
- Revision Paper 1Document26 pagesRevision Paper 1Amaan JamakPas encore d'évaluation
- (Final) LHS ML Information System User's ManualDocument111 pages(Final) LHS ML Information System User's ManualHarold Paulo MejiaPas encore d'évaluation
- Notes On Data Structures and Programming Techniques (CPSC 223, Spring 2021)Document659 pagesNotes On Data Structures and Programming Techniques (CPSC 223, Spring 2021)KALKA DUBEYPas encore d'évaluation
- NasmDocument67 pagesNasmPaul Cockshott100% (1)