Vous aimerez peut-être aussi
- Final Report On Line Follower RobotDocument44 pagesFinal Report On Line Follower RobotAjay Verma50% (4)
- Auto LightDocument37 pagesAuto LightKrishna MalhotraPas encore d'évaluation
- Automatic Room Light ControllerDocument36 pagesAutomatic Room Light Controllerlove2honney100% (1)
- Bidirectional Visitor CounterDocument17 pagesBidirectional Visitor CounterPankaj KumarPas encore d'évaluation
- Railway Accident Monitoring System: A Project Report ONDocument13 pagesRailway Accident Monitoring System: A Project Report ONPrateek SrivastavPas encore d'évaluation
- Chapter 1. OverviewDocument58 pagesChapter 1. OverviewmgitecetechPas encore d'évaluation
- Automatic Speed BreakerDocument69 pagesAutomatic Speed BreakerRohitesh KumarPas encore d'évaluation
- Line Following RobotDocument54 pagesLine Following RobotGautam RaaviPas encore d'évaluation
- Practical PIC ProjectsDocument14 pagesPractical PIC ProjectsArdhika Dhennis Putra Ananda100% (1)
- Embedded Systems Using 8051 MicrocontrollerDocument36 pagesEmbedded Systems Using 8051 MicrocontrollervineetchachraPas encore d'évaluation
- Speed Detector For HighwaysDocument29 pagesSpeed Detector For HighwaysShama MahinPas encore d'évaluation
- 3Document34 pages3Ankit AgrawalPas encore d'évaluation
- Automatic Car Parking System Using 89c51 MicrocontrollerDocument61 pagesAutomatic Car Parking System Using 89c51 MicrocontrollerAnil Tandon63% (16)
- Microcontroller Based LPG Gas Detector Using GSM ModuleDocument22 pagesMicrocontroller Based LPG Gas Detector Using GSM ModuleKrishna MalhotraPas encore d'évaluation
- Mini Project Report-2Document26 pagesMini Project Report-2Remya Ramakrishnan0% (2)
- Institute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotDocument44 pagesInstitute of Engineering and Technology, Alwar, Rajasthan: Wireless Keypad Controlled RobotTwinkle SinghPas encore d'évaluation
- MIcrocontroller Based Embedded System E - ContentsDocument54 pagesMIcrocontroller Based Embedded System E - ContentsLokesh SharmaPas encore d'évaluation
- Smart Mail Box..Document63 pagesSmart Mail Box..joyalPas encore d'évaluation
- Line FollowerDocument22 pagesLine FollowerAnkit KumarPas encore d'évaluation
- Hand Gesture Control Robot PDFDocument3 pagesHand Gesture Control Robot PDFMd IrfanPas encore d'évaluation
- Line Maze Solving RobotDocument10 pagesLine Maze Solving Robottcteh86Pas encore d'évaluation
- Project Report On Microcontroller Based Traffic Light ControllerDocument23 pagesProject Report On Microcontroller Based Traffic Light Controllerالموعظة الحسنه chanelPas encore d'évaluation
- Analog To Digital Convertor Interface With 8051 MicrocontrollerDocument28 pagesAnalog To Digital Convertor Interface With 8051 MicrocontrollerbbbbgcbgbePas encore d'évaluation
- Project Report On Microcontroller Based Traffic Light ControllerDocument22 pagesProject Report On Microcontroller Based Traffic Light ControllerMohitpariharPas encore d'évaluation
- Sumi Proj Copyprojectdoc (Repaired)Document13 pagesSumi Proj Copyprojectdoc (Repaired)lucky jPas encore d'évaluation
- Coin Based Mobile Charger Project ReportDocument49 pagesCoin Based Mobile Charger Project ReportAnonymous dyJj42aWMb92% (13)
- Index: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionDocument19 pagesIndex: Objective Introduction Circuit Description List of Components Circuit Diagram Components DescriptionKrishnaBihariShuklaPas encore d'évaluation
- Power Supply Display: 1. Block Diagram of Proposed WorkDocument8 pagesPower Supply Display: 1. Block Diagram of Proposed WorkpnkjinamdarPas encore d'évaluation
- School of Electrical Engineering: The University of Faisalabad, FaisalabadDocument13 pagesSchool of Electrical Engineering: The University of Faisalabad, FaisalabadSHAROON SARDAR GHULAMPas encore d'évaluation
- Print DocuDocument50 pagesPrint Docuchandu485Pas encore d'évaluation
- AVR Project - Remote Controlled Fan Regulator.Document23 pagesAVR Project - Remote Controlled Fan Regulator.nadaratPas encore d'évaluation
- Chapter 2 - 8051 Microcontroller ArchitectureDocument27 pagesChapter 2 - 8051 Microcontroller ArchitectureAgxin M J Xavier100% (1)
- Highway Speed CheckerDocument24 pagesHighway Speed Checkerritesh chauhanPas encore d'évaluation
- Cetpa Infotech Pvt. LTD: Department of Embedded SystemDocument49 pagesCetpa Infotech Pvt. LTD: Department of Embedded SystemsknagarPas encore d'évaluation
- Submitted To: Submitted By: Mr. Abishek Sharma Arish Kumar Sharma 100640418019 Ece-ADocument25 pagesSubmitted To: Submitted By: Mr. Abishek Sharma Arish Kumar Sharma 100640418019 Ece-ASharan ThapaPas encore d'évaluation
- Applications of 8051 MicrocontrollersDocument23 pagesApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- SPEED CHECKER FOR HI-WAsYSDocument26 pagesSPEED CHECKER FOR HI-WAsYSAbhinav KumaarPas encore d'évaluation
- Gas Leakage Alerting System in IndustriesDocument44 pagesGas Leakage Alerting System in IndustriesGanesan S BEPas encore d'évaluation
- Circuit TodayDocument30 pagesCircuit TodayBrian GiriPas encore d'évaluation
- Microcontroller Lab Manual With Arduino Programe PDFDocument63 pagesMicrocontroller Lab Manual With Arduino Programe PDFTejasaiPas encore d'évaluation
- IR Radar With Laser Shoot - SYNOPSISDocument11 pagesIR Radar With Laser Shoot - SYNOPSISashishkvianPas encore d'évaluation
- File 1389426553Document25 pagesFile 1389426553Er Amarsinh RPas encore d'évaluation
- Project Report On Microcontroller Based Traffic Light Controller.Document22 pagesProject Report On Microcontroller Based Traffic Light Controller.Ayan Samanta80% (10)
- RS 485Document51 pagesRS 485mgitecetech100% (1)
- Helmet MiniDocument56 pagesHelmet MiniSumanth VarmaPas encore d'évaluation
- 1st Rev Road RaggingDocument22 pages1st Rev Road RaggingElamaruthiPas encore d'évaluation
- Remote Tracking and Breaking System For VehiclesDocument5 pagesRemote Tracking and Breaking System For VehiclesseventhsensegroupPas encore d'évaluation
- EMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVDocument36 pagesEMBEDDED BASED Automatic AUDITORIUM CONTROLLER 0TH REVspringsource100% (1)
- Bluetooth Controlled Electronic Home AppliancesDocument14 pagesBluetooth Controlled Electronic Home AppliancesAmanPas encore d'évaluation
- Lab Manual 8051Document40 pagesLab Manual 8051Gnanasambanthan Rajendran50% (2)
- Temp Sensing Using MicrocDocument15 pagesTemp Sensing Using MicrocShubham RajpootPas encore d'évaluation
- MM Lab ManualDocument53 pagesMM Lab ManualDev SejvaniPas encore d'évaluation
- AEC - Bluetooth Controlled CarDocument10 pagesAEC - Bluetooth Controlled Cardinesh rajendranPas encore d'évaluation
- PLC Quick Working ExplainDocument8 pagesPLC Quick Working ExplainMalik SameeullahPas encore d'évaluation
- Metal Detector Robotic Vehicle: Submitted byDocument25 pagesMetal Detector Robotic Vehicle: Submitted byDarshan ParmarPas encore d'évaluation
- Beginning Digital Electronics through ProjectsD'EverandBeginning Digital Electronics through ProjectsÉvaluation : 5 sur 5 étoiles5/5 (1)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsD'EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsÉvaluation : 3 sur 5 étoiles3/5 (2)
- Linear IC Applications: A Designer's HandbookD'EverandLinear IC Applications: A Designer's HandbookÉvaluation : 4 sur 5 étoiles4/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1D'EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Évaluation : 4.5 sur 5 étoiles4.5/5 (3)
- Basic ECEDocument2 pagesBasic ECEmarkvillaplazaPas encore d'évaluation
- Ultrasonic Distance MeterDocument11 pagesUltrasonic Distance MeterHafiz Murtaza100% (3)
- CMO 97 S. 2017 BS Mechanical Engineering ProgramDocument94 pagesCMO 97 S. 2017 BS Mechanical Engineering Programryan fernandez100% (1)
- SK40B User's ManualDocument14 pagesSK40B User's ManualMohd Nur AriefPas encore d'évaluation
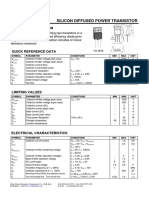
- D2499 Transistor de PotenciaDocument1 pageD2499 Transistor de Potenciajoroma58Pas encore d'évaluation
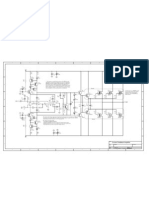
- CfbampDocument1 pageCfbampIr GarPas encore d'évaluation
- 3.2 Inch LCD Shield For MEGA 2560Document9 pages3.2 Inch LCD Shield For MEGA 2560detonatPas encore d'évaluation
- Biasing: Unit - Ii Transistor Biasing Circuits Ans Small Signal Analysis of BJT Amplifiers 9 HrsDocument19 pagesBiasing: Unit - Ii Transistor Biasing Circuits Ans Small Signal Analysis of BJT Amplifiers 9 HrsGoran WnisPas encore d'évaluation
- Investors Presentation: Roy Porat, CEO - Moshe Eisenberg, CFODocument22 pagesInvestors Presentation: Roy Porat, CEO - Moshe Eisenberg, CFOotteromPas encore d'évaluation
- Iu.e5.116.0 XCSW240Document2 pagesIu.e5.116.0 XCSW240FolpoPas encore d'évaluation
- 5MO365R Datasheet 234274 - DSDocument21 pages5MO365R Datasheet 234274 - DSjoaocarlos1705Pas encore d'évaluation
- 3.1 Analog MultipliersDocument17 pages3.1 Analog MultipliersMarykutty CyriacPas encore d'évaluation
- Ch6 DiffusionDocument35 pagesCh6 DiffusionRameshkumar KandaswamyPas encore d'évaluation
- Electronics System Design 34Document5 pagesElectronics System Design 34karthikeyan1992Pas encore d'évaluation
- BTS621L1Document14 pagesBTS621L1japonesito123456Pas encore d'évaluation
- Diode ApplicationsDocument119 pagesDiode ApplicationsFlorenzo Miguel AclanPas encore d'évaluation
- Device and Circuit Performance Analysis of Double Gate Junctionless Transistors at LG 18 NMDocument6 pagesDevice and Circuit Performance Analysis of Double Gate Junctionless Transistors at LG 18 NMJawar SinghPas encore d'évaluation
- Directed 750d - User ManualDocument20 pagesDirected 750d - User ManualAlina CarazaPas encore d'évaluation
- PV - TDDocument74 pagesPV - TDAyoub BoulboulPas encore d'évaluation
- STR A6169Document2 pagesSTR A6169Hanif Rathore PrincePas encore d'évaluation
- VLD oDocument52 pagesVLD oManuel Octavio Penroz CelisPas encore d'évaluation
- Standard CellDocument133 pagesStandard CellSon Quang LePas encore d'évaluation
- Fen 31 Um B PDFDocument38 pagesFen 31 Um B PDFogctronikPas encore d'évaluation
- Data Sheet: Part No. Package Code No. SSOP016-P-0225EDocument32 pagesData Sheet: Part No. Package Code No. SSOP016-P-0225Ekarti0660Pas encore d'évaluation
- Senzor Magnetic FarnellDocument5 pagesSenzor Magnetic FarnellAndrei GhitaPas encore d'évaluation
- CG-428 - 06 TransistorsDocument17 pagesCG-428 - 06 TransistorsMark ClementsPas encore d'évaluation
- Max1909 Max8725Document30 pagesMax1909 Max8725Juan CarlosPas encore d'évaluation
- 7SJ45 Application NoteDocument18 pages7SJ45 Application NoteSathish KumarPas encore d'évaluation
- Technical Data Sheet ELSEC EngDocument2 pagesTechnical Data Sheet ELSEC EngruhamagpsPas encore d'évaluation
- ECE 372 - Chap14Document65 pagesECE 372 - Chap14amritaecePas encore d'évaluation