Académique Documents
Professionnel Documents
Culture Documents
Logica Relevador - 2014-Iii
Transféré par
jesustarin5571050 évaluation0% ont trouvé ce document utile (0 vote)
32 vues45 pagesTitre original
LOGICA RELEVADOR - 2014-III.pptx
Copyright
© © All Rights Reserved
Formats disponibles
PPTX, PDF, TXT ou lisez en ligne sur Scribd
Partager ce document
Partager ou intégrer le document
Avez-vous trouvé ce document utile ?
Ce contenu est-il inapproprié ?
Signaler ce documentDroits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PPTX, PDF, TXT ou lisez en ligne sur Scribd
0 évaluation0% ont trouvé ce document utile (0 vote)
32 vues45 pagesLogica Relevador - 2014-Iii
Transféré par
jesustarin557105Droits d'auteur :
© All Rights Reserved
Formats disponibles
Téléchargez comme PPTX, PDF, TXT ou lisez en ligne sur Scribd
Vous êtes sur la page 1sur 45
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
1
COLOA : Sistemas cableados
Instructor: Jess M. Tarn Fontes
CARRERA:
2014 - III
CONTROLADORES LOGICOS PROGRAMABLES
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
2
COLOA : Sistemas cableados
Lgica de control por relevador
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
3
COLOA : Sistemas cableados
1. Introduccin
2. Componentes de un automatismo Industrial.
3. Mtodos de diseo.
4. Implantacin con contactores y pulsadores.
5. Dispositivos elctricos para circuitos de control.
5.1 Dispositivos de control electromecnicos, contactores.
5.2 Tipos de interpretacin de diagramas de control.
CONTENIDO
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
4
COLOA : Sistemas cableados
DEFINICION
Un A.I es un sistema constituido por diferentes dispositivos y
elementos que al recibir una serie de informaciones procedentes
del exterior es capaz de generar las rdenes necesarias para que
los receptores por l controlados realicen la funcin para la que
fue diseado.
1. AUTOMATISMOS INDUSTRIALES
Aportacin cultural:
En la industria las necesidades son
muchas y variadas. Las personas no
somos mquinas (afortunadamente) y
por ello nuestro trabajo solo puede
controlar un nmero determinado de
variables a la vez y est demostrado
que las personas no rendimos
adecuadamente en aquellos trabajos
que son muy repetitivos y montonos,
adems de ser mucho ms rentable y
econmico en el mundo de la industria
un automatismo.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
5
COLOA : Sistemas cableados
Los dispositivos y elementos que constituyen el automatismo es
muy variada. Los primeros eran de tipo mecnico, segn fue
evolucionando la tcnica, aparecieron los automatismos elctricos
y electrnicos, predominando hoy da estos ltimos, aunque sigue
habiendo mecnicos, neumticos e hidrulicos.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
6
COLOA : Sistemas cableados
Segn los elementos empleados se clasifican en:
Mecnicos. Son los ms antiguos y estn formados por
engranajes, palancas, levas, etc.
Elctricos. Basan su funcionamiento en los contactores, rels,
pulsadores, conmutadores, etc., pero siguen empleando
elementos mecnicos.
Neumticos. Su funcionamiento es por aire comprimido y emplean
elementos como los cilindros, vlvulas neumticas, electro-
vlvulas, etc., utilizando tambin elementos mecnicos y elctricos
en su estructura.
Electrnicos. Basan su funcionamiento en los circuitos digitales y
emplean componentes electrnicos integrados y discretos. Utilizan
tambin elementos mecnicos elctricos y neumticos incluyendo
los ms modernos sistemas informticos.
2. CLASIFICACION DE LOS AUTOMATISMOS
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
7
COLOA : Sistemas cableados
Segn su capacidad de trabajo se clasifican en:
Automatismos cableados o no programables. Son aquellos
que slo sirven para la funcin para la que fueron diseados,
teniendo que variar los elementos que lo componen de forma
parcial o total para que realicen otra funcin.
Automatismos programables. Son los basados en
microprocesadores cuya funcin vara con el programa
grabado en la memoria interna o externa de un sistema de
desarrollo de microprocesadores.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
8
COLOA : Sistemas cableados
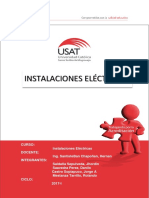
ESTRUCTURA BASICA DE UN A.I
Circuito de mando o de control. Este bloque o circuito recibe las
informaciones del exterior, procedentes de sensores, pulsadores,
etc.
Con ellas genera las rdenes oportunas para que los receptores o
elementos conectados al A.I. realicen la funcin para la que fue
diseado el circuito.
Dependiendo de la estructura interna de este bloque, el
automatismo ser programable o no programable.
Circuito
de
mando
Circuito de
potencia
Interface
Amplificado
r
Informacin
del exterior
Fig.1 Esquema de bloques de un automatismo industrial
Receptor
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
9
COLOA : Sistemas cableados
Circuito de interface o amplificador. Este bloque no existe en
todos los automatismos. Se emplea cuando las rdenes
generadas por el circuito de mando no tienen la forma o potencia
adecuadas para activar los componentes o dispositivos que
controlan a los receptores.
Circuito de potencia. Este dispositivo est constituido
habitualmente por contactores, rels o componentes de potencia,
es quin en realidad controla a los receptores que constituyen la
salida fsica del A.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
10
COLOA : Sistemas cableados
Cualquier automatismo puede ser diseado como cableado o
programable, el empleo de uno u otro depender de varios factores:
Complejidad, volumen que deber tener, localizacin y fin del
automatismo, economa, etc.
Condiciones
de diseo
Sistemas
de diseo
Ecuacin
Lgica
Economa
Normas de
Seguridad
Circuito
prctico
Diseo para automatismos no programados
METODOS DE DISEO DEL CIRCUITO DE CONTROL DE UN
AUTOMATISMO
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
11
COLOA : Sistemas cableados
Partiremos de las condiciones fsicas del funcionamiento del
sistema, en las cuales habr que definir:
Variables o informaciones de entrada
Forma de funcionamiento del automatismo (sin ciclo de trabajo
o con l.
Elementos o receptores de salida.
Con estas condiciones de funcionamiento, seleccionamos el
mtodo de diseo.
Diseo por tabla de verdad. Cuando se trata de un A. de
pequea complejidad y con pocas variables de entrada; es el
mtodo ms adecuado. Consiste en plantear la tabla de verdad y
por lgebra de Boole obtener la ecuacin lgica que define su
funcionamiento.
Diseo razonado. Mtodo que, clasificando las variables de
entrada como creadoras y anuladoras de cada receptor o salida,
aplica el teorema siguiente:
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
12
COLOA : Sistemas cableados
La ecuacin de cualquier funcin se obtiene por el producto de
cada una de las variables anuladoras negadas, multiplicado por la
suma de todas las variables creadoras sin negar.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
13
COLOA : Sistemas cableados
Diseo para automatismos programables
Condiciones de
Funcionamiento
Tabla de
estados
Diagrama de
Flujo
Programa
Partiendo de las condiciones de funcionamiento, realizaremos
bien una tabla de verdad simplificada de funcionamiento o bien
una tabla de estados o secuencia segn el tipo de trabajo que
realice el automatismo.
Seguidamente se obtendr el diagrama de flujo o algoritmo que
representa el funcionamiento del sistema, para pasar por ltimo a
la confeccin del programa correspondiente.
Dicho programa se realizar dependiendo del sistema que vaya a
controlar el automatismo, en lenguaje ensamblador o en un
lenguaje de alto nivel.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
14
COLOA : Sistemas cableados
Los AI Trabajan de dos formas diferentes:
Automatismos sin ciclo de trabajo. Son aquellos en los que
las salidas se activan sin seguir un orden pre-establecido,
obedeciendo las informaciones presentes en la entrada del
automatismo. No existe, por tanto, secuencia de trabajo.
Automatismo con ciclo de trabajo. En estos automatismos
sus salidas se activan secuencialmente siguiendo un orden
preestablecido. El paso de un estado de salida al siguiente se
produce al activarse una determinada entrada del automatismo.
FORMAS DE FUNCIONAMIENTO DE UN AUTOMATISMO Y
SEALES DE CONTROL
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
15
COLOA : Sistemas cableados
Este tipo de automatismo no trabaja realizando una secuencia fija
de activacin de sus salidas, dependiendo solamente dicha
activacin del valor que tomen el conjunto de sus entradas.
Los automatismo sin ciclo pueden trabajar, a su vez, de dos
formas:
Automatismo sin memoria del ltimo estado de salida.
Automatismo con memoria del ltimo estado de salida.
En los primeros, la respuesta del automatismo no tiene para nada
en cuenta la situacin de la salida en el momento inmediatamente
anterior a producirse una variacin en la entrada. Por el contrario,
en los automatismos con memoria si la tiene en cuenta.
La mayor parte de los automatismos que trabajan sin ciclo
funcionan con memoria del ltimo estado de sus salidas.
AUTOMATISMOS SIN CICLO DE TRABAJ O
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
16
COLOA : Sistemas cableados
Los automatismos sin ciclo de trabajo se caracterizan por poseer
los siguientes tipos de entradas:
Entrada/s de activacin o <<marcha>>
Entrada/s de detencin o <<parada>>
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
17
COLOA : Sistemas cableados
Lo que ms destaca en este tipo de automatismos es el
funcionamiento secuencial de sus salidas. Esta secuencialidad
implica la necesidad de que estos automatismos trabajen siempre
con memoria del ltimo estado de las salidas.
Los automatismos con ciclo de trabajo pueden efectuar su funcin
de dos formas bsicas:
Automatismos con ciclo que trabajan en <<ciclo nico>
En esta forma de trabajo, el automatismo comienza su
funcionamiento al producirse una orden de marcha, realizando
toda su secuencia de trabajo segn se va produciendo la
activacin de la entrada oportuna.
El automatismo se detiene por si solo al final del ciclo de trabajo.
AUTOMATISMOS CON CICLO DE TRABAJO
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
18
COLOA : Sistemas cableados
Estos automatismos poseen los siguientes tipos de entradas:
Entradas de <<marcha>>
Entradas de secuencia o cambio de fase.
Entrada de <<emergencia>>. Esta entrada detiene
instantneamente la secuencia de trabajo all donde se produce.
Automatismos con ciclo que trabajan en <ciclo automtico>
En este caso, el automatismo realiza el ciclo de trabajo al recibir la
orden de marcha. Cuando llega al fin del ciclo comienza uno
nuevo sin necesidad de orden de marcha, efectuando ciclos de
manera indefinida hasta la recepcin de una orden de parada.
Son precisos, en consecuencia, los siguientes tipos de entradas:
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
19
COLOA : Sistemas cableados
Entrada de <marcha>
Entradas de secuencia o cambio de fase.
Entrada de <paro>. Hay que hacer notar que esta entrada no
detiene instantneamente el automatismo, sino que desmemoriza
el trabajo en ciclo automtico, causa por la cual el automatismo se
para al final del ciclo de trabajo en curso.
Entrada de <emergencia>.
Entrada de <rearme>. La orden de emergencia no debe
desactivarse con la simple activacin de la orden de marcha por
simples razones de seguridad.
En la prctica es, por tanto, conveniente aadir una nueva
entrada, cuya activacin anule la memorizacin de emergencia
con lo cual se desbloquee la entrada de marcha; a esta entrada se
le denomina rearme O RESET.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
20
COLOA : Sistemas cableados
Pulsadores. Son elementos de interrupcin de corriente con dos
posiciones de salida de las cuales slo una es de reposo, mientras
que la otra se activa solamente durante el tiempo que est
oprimido su eje de accionamiento. Existen muchos tipos: NA y NC.
Mltiples. Son combinados de los anteriores montados sobre un
mismo eje.
Mltiple
N.A - N.C.
Mltiple
N.A - N.C.
Pulsador Salida
0
1
0
1
Pulsador Salida
0
1
1
0
Normalmente abiertos
Normalmente cerrados
N.C. N.A.
ELEMENTOS EMPLEADOS EN AUTOMATISMOS INDUSTRIALES
ELECTRICOS Y ELECTRONICOS
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
21
COLOA : Sistemas cableados
Contactores y rels. Son dispositivos electromecnicos que
permiten controlar la apertura y cierre de circuitos mediante
accionamiento elctrico. La diferencia existente entre ambos tipos
radica bsicamente en la corriente y potencia que son capaces de
soportar sus contactos.
Sus elementos y simbologa aparecen en la Fig. 1-5
A
1
A
2
Bobina
Antiguo
1
2
3
4
K
N.A N.A K
1
2
3
4
5
6
Trifsico
Contactos potencia
A
1
A
2
Bobina
Antiguo
1
2
3
4
K
N.A N.A K
1
2
3
4
5
6
Trifsico
Contactos potencia
Contactos auxiliares
N.A
K
1
2
3
4
K
N.C.
Moderno
Antiguo
N.A
N.C
K
Temporizado
Contactos auxiliares
N.A
K
1
2
3
4
K
N.C.
Moderno
Antiguo
N.A
N.C
K
Temporizado
Fig. 1.5 Contactores y rels
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
22
COLOA : Sistemas cableados
1-9 PRINCIPIO DE FUNCIONAMIENTO DE UN RELE Y CONTACTOR
Los contactores y rels son conmutadores electromagnticos, es decir,
dispositivos que permiten la apertura y / o el cierre simultneo de dos o
varios circuitos diferentes por medio de la accin de una corriente
elctrica aplicada a un electroimn. Existe una gran variedad de
contactores y rels, pero en todos ellos se distinguen los siguientes
elementos que aparecen en la Fig. 1-6.
Resorte
Culata
Terminales bobina
Ncleo
Bobina excitadora
N.C
N.A
Comn
Contactos
Pivote
Armadura
Lmina portacontactos
Resorte
Culata
Terminales bobina
Ncleo
Bobina excitadora
N.C
N.A
Comn
Contactos
Pivote
Armadura
Lmina portacontactos
Fig. 1-6
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
23
COLOA : Sistemas cableados
Funcionamiento
Si no se aplica corriente a la bobina, el dispositivo se encuentra en
estado de reposo, no siendo atrada la armadura por el ncleo y,
por tanto, permaneciendo cerrado el contacto normalmente
cerrado (N.C). y abierto el contacto N.A.
Cuando se aplica corriente a la bobina, sta crea un campo
magntico que transforma el ncleo en electroimn, atrayendo
ste a la armadura que bascula y mueve la lmina portacontactos
provocando el cierre del contacto normalmente abierto (N.A) y la
apertura del contacto normalmente cerrado (N.C)..
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
24
COLOA : Sistemas cableados
Mientras la corriente permanezca circulando por la bobina, no se
producen variaciones en el dispositivo, pero si esta cesa,
desaparece el campo magntico y el resorte devuelve la armadura
a su posicin de reposo. En la prctica, los rels y contactores
suelen llevar varios grupos de contactos de N.A. y N.C., que se
denominan contactores auxiliares
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
25
COLOA : Sistemas cableados
Bulletin 500 AC Contactors are
available in Top Wiring
Construction from NEMA Size 00.9.
All power connections are at the
top of the contactors. Bulletin 500
contactors are used for switching
AC motor loads where overload
protection is not required or is
provided separately. The
contactors may be operated
remotely by pilot devices such as
push buttons, selector switches,
timers, relays or temperature
switches.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
26
COLOA : Sistemas cableados
Motor contactors with over-load protection.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
27
COLOA : Sistemas cableados
Relays
Relays have a similar construction to
contactors, but since they are usually
switching low-current logic signals,
they do not have a requirement for the
heavy-duty contacts and arc-
suppression hardware.
Most relay contacts have an AC
continuous rating of no more than 10
amperes. They can close on an in-rush
current of 150%, but only break 15% at
120 volts AC (vac). A NEMA A600
rating limits the inrush to 7200
voltamperes (va), and a circuit
breaking rating of 720 voltamperes. As
higher voltages are used, the current
capacity goes down proportionately.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
28
COLOA : Sistemas cableados
Electronic timers with sealed contacts.
The Figure shows stand-alone electronic timer relays that use
sealed contact cartridges that provide contamination protection
and maximum reliability when switching low potential signals.
These often have gold-plated contacts that can conduct and switch
solid-state logic signals.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
29
COLOA : Sistemas cableados
Typical mechanical limit switch.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
30
COLOA : Sistemas cableados
Special purpose limit switches
Mechanical limit switches have many configurations. Most will
have both NO and NC contacts available. The contacts are
switched when the lever arm is rotated a few degrees by a moving
cam or slider
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
31
COLOA : Sistemas cableados
Common electrical symbols
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
32
COLOA : Sistemas cableados
Diagrama de alambrado para
un arrancador de motor
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
33
COLOA : Sistemas cableados
Cada ecuacin se implementar con un contactor o rel
Las entradas de la ecuacin se realizan con pulsadores o
contactos auxiliares de los contactores.
Cuando en una ecuacin aparece como entrada una salida, dicha
entrada se realiza con un contacto auxiliar del contactor que
implementa dicha ecuacin.
Las multiplicaciones de variables en una ecuacin equivalen a
poner en serie los elementos que representan dichas variables.
Las sumas de variables en una ecuacin equivalen a poner en
paralelo los elementos que componen dicha suma.
NORMAS PARA LA IMPLEMENTACION DE FUNCIONES LOGICAS CON
CONTACTORES Y PULSADORES
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
34
COLOA : Sistemas cableados
Las negaciones de variables en una ecuacin equivalen al empleo
de elementos (pulsadores o contactos normalmente cerrados).
Las negaciones de grupos de variables no pueden implementarse
directamente, precisando de la aplicacin previa del lgebra de
boole para su reduccin a variables simples. Ejemplo
c b a c b a
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
35
COLOA : Sistemas cableados
Push-buttons (Courtesy Allen-Bradley Co., Milwaukee, WI)
Push-pull control button (Courtesy
Allen-
Bradley Co., Milwaukee, WI)
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
36
COLOA : Sistemas cableados
Assortment (surtido) of 3-position selector switches
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
37
COLOA : Sistemas cableados
Non-contact, inductive proximity switches
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
38
COLOA : Sistemas cableados
1. Implementar con pulsadores solamente la siguiente ecuacin
lgica de un A.I.
d c b a S
2. Realizar la implementacin con pulsadores de un automatismo
cuya ecuacin lgica es la siguiente:
b a d c S
b a d c S
d c d c
b a b a
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
39
COLOA : Sistemas cableados
3. Empleando solamente pulsadores, realizar la implementacin de
la siguiente ecuacin de funcionamiento de un automatismo:
d c d c c b a S
4. Un A.I. Est constituido por dos receptores R y S que son gobernados por
cinco variables de entrada m, p, a, b y c, de forma que cumplen las
siguientes ecuaciones:
a b m c p R
b a m c p S
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
40
COLOA : Sistemas cableados
5. Sabiendo que las ecuaciones de funcionamiento de un
automatismo son las siguientes:
1 1 2 1 1
R m R p R
2 2 2 2
R m p R
Implementar el circuito con contactores y pulsadores.
La mayor parte de los automatismos son capaces de recordar el
ltimo estado de su salida y permanecer en el indefinidamente
hasta que una alteracin de sus variables de entrada le obligue a
modificarlo. A este proceso de memorizacin se le denomina
funcin memoria.
En la ecuacin de funcionamiento de un circuito, esta funcin
memoria se distingue por aparecer la variable de salida formando
parte de las variables de entrada en el otro miembro de la
ecuacin. Cuando esto sucede, la implementacin del circuito no
puede realizarse solamente con pulsadores, ya que estos
elementos no son capaces de memorizar los impulsos elctricos.
Se hace entonces preciso el empleo de los rels o contactores.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
41
COLOA : Sistemas cableados
Procedimiento prctico para la implementacin
Se emplear un contactor o rel por cada ecuacin que posea
el automatismo. Sus contactos de potencia son los que
controlan el receptor cuyo funcionamiento define la ecuacin.
El circuito de control o de mando de cada contactor o rel
estar formado por la implementacin de cada ecuacin con
las mismas normas empleadas en problemas anteriores.
Cuando nos encontramos en una ecuacin en la que la salida
aparece como una variable de entrada, colocaremos en su
lugar un contacto auxiliar del rel o contactor que controla
dicha ecuacin.
Por ltimo, realizaremos el circuito de potencia representando
el receptor en serie con la alimentacin y el contacto de
potencia correspondiente del rel o contactor.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
42
COLOA : Sistemas cableados
7. Empleando contactotes y pulsadores, realizar la implementacin del A.I.
definido por las siguientes ecuaciones:
X m p X Iz d X De i I
Z
De i Iz d De
Mtodo de tabla de verdad
8. Realizar el diseo de los circuitos de mando y de potencia necesarios
para el control de parada-marcha de un motor trifsico por el mtodo de
tabla de verdad.
6. Implementar con contactores y pulsadores el automatismo cuyas
ecuaciones se indican seguidamente
C m g d C B d S f B S f B g S
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
43
COLOA : Sistemas cableados
Solucin
Procedimiento
Planteamiento. Se definen las variables de entrada que aporten
informacin al automatismo. El motor precisa de dos entradas para su
control:
m(marcha)
P(paro)
El funcionamiento de ambas entradas permitir la activacin y
desactivacin por simple pulsacin, teniendo presente que en caso de
producirse por error o avera la activacin simultanea de ambas entradas,
tendr siempre prioridad la orden de paro y el motor se parar.
Diseo de la ecuacin del circuito de control. Se obtiene la ecuacin
de funcionamiento por el mtodo de tabla de verdad.
La tabla de verdad del automatismo se obtiene de las condiciones de
funcionamiento y enunciadas en el apartado anterior denominado
planteamiento.
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
44
COLOA : Sistemas cableados
UNIVERSIDAD TECNOLOGICA DE HERMOSILLO
Ing. Mecatrnica Control Lgico Avanzado
45
COLOA : Sistemas cableados
45
Vous aimerez peut-être aussi
- Fundamentos de LabVIEWDocument52 pagesFundamentos de LabVIEWjesustarin557105Pas encore d'évaluation
- Cap 7 PLC UthDocument94 pagesCap 7 PLC Uthjesustarin557105Pas encore d'évaluation
- Pid para PLC Micrlogix 1100 (Nov 14 - 2016)Document8 pagesPid para PLC Micrlogix 1100 (Nov 14 - 2016)jesustarin557105100% (1)
- Cap 7 PLC UthDocument75 pagesCap 7 PLC Uthjesustarin557105Pas encore d'évaluation
- Practica Termopar LabvoltDocument21 pagesPractica Termopar Labvoltjesustarin557105100% (1)
- Conti 2017 Jesus Ramiro Vila SaforaDocument194 pagesConti 2017 Jesus Ramiro Vila SaforaRichardManriqueBPas encore d'évaluation
- Drone ExploradorDocument11 pagesDrone ExploradorBernard Surita PlacenciaPas encore d'évaluation
- Loja - Pionera de La Generacion Electrica en EcuadorDocument89 pagesLoja - Pionera de La Generacion Electrica en EcuadorJorge Luis Jaramillo Pacheco100% (2)
- Especificación Técnica Nº75 de AyEEDocument18 pagesEspecificación Técnica Nº75 de AyEEignacioasenjo100% (2)
- Diferencias y Ventajas Entre PLC y PIC - Foros de ElectrónicaDocument1 pageDiferencias y Ventajas Entre PLC y PIC - Foros de ElectrónicaBrain Magdaleno DazaPas encore d'évaluation
- Sistema Direct Drive en Lavarropas LG (Incluye Error LE) - 61140Document12 pagesSistema Direct Drive en Lavarropas LG (Incluye Error LE) - 61140AlbertoAcostaVerdugoPas encore d'évaluation
- Practica No 1 TrafosDocument1 pagePractica No 1 TrafosLucio Alvaro Machaca BustosPas encore d'évaluation
- ET-196-PEMEX-2019 Cargador y Banco de BateríasDocument32 pagesET-196-PEMEX-2019 Cargador y Banco de Bateríascleyvas100% (3)
- Manual de Instrucciones PR 2 HS ES Manual de Instrucciones PUB 5142555 000Document20 pagesManual de Instrucciones PR 2 HS ES Manual de Instrucciones PUB 5142555 000Marcos Nava BarbozaPas encore d'évaluation
- Conexion TrifasicoDocument12 pagesConexion TrifasicoAnthony Rodriguez FloresPas encore d'évaluation
- Guia de Instalacion ElectricaDocument41 pagesGuia de Instalacion ElectricaJorge Santiago VeramendiPas encore d'évaluation
- Unisec - Braian HeguisDocument35 pagesUnisec - Braian HeguisMario GranadoPas encore d'évaluation
- Cuestionario1 MataGarneloJorgeDocument7 pagesCuestionario1 MataGarneloJorgeJorge Mata GarneloPas encore d'évaluation
- 88d19 SubmayoDocument2 pages88d19 SubmayoCésar Octavio MárquezPas encore d'évaluation
- Unidad 5 - Actividad 1Document2 pagesUnidad 5 - Actividad 1cpyin88Pas encore d'évaluation
- Memoria Descriptiva PDFDocument28 pagesMemoria Descriptiva PDFDanilo SaavedraPas encore d'évaluation
- Manual Del Electricista S1Document16 pagesManual Del Electricista S1Oscar Isai Andaraca EnriquezPas encore d'évaluation
- CV1 2570Document23 pagesCV1 2570Jamil Rodri ChoquePas encore d'évaluation
- Interruptor Mecánico de Tiempo IH - CCT15365Document2 pagesInterruptor Mecánico de Tiempo IH - CCT15365jhuayre-1Pas encore d'évaluation
- Control de Potencia AC Con ArduinoDocument4 pagesControl de Potencia AC Con ArduinoZenon GuzmanPas encore d'évaluation
- 4 Convertidor de Corriente A VoltajeDocument5 pages4 Convertidor de Corriente A VoltajeArmyn RVPas encore d'évaluation
- MCon DSol U-2Document2 pagesMCon DSol U-2Alexsandrí Nájera GutiérrezPas encore d'évaluation
- Tesis ModbusDocument155 pagesTesis Modbusigorzp777Pas encore d'évaluation
- Ley de CoulombDocument5 pagesLey de CoulombJuanda SanguinoPas encore d'évaluation
- ResumenDocument2 pagesResumenMilton Jô50% (2)
- FO233-018D Bitácora Realiza y Mantiene Instalaciones EléctricasDocument16 pagesFO233-018D Bitácora Realiza y Mantiene Instalaciones EléctricasRamírez SánchezPas encore d'évaluation
- Temas de IngC9Document36 pagesTemas de IngC9Alejandro Lázaro AguilarPas encore d'évaluation
- Definiciones y ConfiguracionesDocument68 pagesDefiniciones y ConfiguracionesWAGUDELOPas encore d'évaluation
- NMX J 674 11 Ance 2013Document56 pagesNMX J 674 11 Ance 2013Margarito BecerraPas encore d'évaluation