Vous aimerez peut-être aussi
- Trabajo Ensayo de FlexionDocument10 pagesTrabajo Ensayo de Flexionalberto8303Pas encore d'évaluation
- Procedimiento Del ContorneadoDocument5 pagesProcedimiento Del ContorneadoMay Ben EstherPas encore d'évaluation
- Proceso para La Fabricación de Los PedalesDocument10 pagesProceso para La Fabricación de Los PedalesamaurimejiaPas encore d'évaluation
- Cinética Tridimensional de Un Cuerpo RigidoDocument47 pagesCinética Tridimensional de Un Cuerpo RigidoDanielAlexisHuamanTitoPas encore d'évaluation
- Clase19-20 Tema5.Interpolación de TrayectoriasDocument41 pagesClase19-20 Tema5.Interpolación de TrayectoriasJean Carlos VillegasPas encore d'évaluation
- Efecto MillerDocument5 pagesEfecto MillerMateo QuizhpiPas encore d'évaluation
- Marco Teórico de Corte DirectoDocument3 pagesMarco Teórico de Corte DirectoLuis Fernando Saavedra Diaz100% (1)
- Temple Diagrama TTT 1Document17 pagesTemple Diagrama TTT 1TR MecánicaPas encore d'évaluation
- Choque TérmicoDocument4 pagesChoque TérmicojaumePas encore d'évaluation
- Formacion de VirutaDocument3 pagesFormacion de Virutaluis revolloPas encore d'évaluation
- Investigación-Calentamiento, Vertido, Solidificación y EnfriamientoDocument8 pagesInvestigación-Calentamiento, Vertido, Solidificación y EnfriamientoDamy OrtizPas encore d'évaluation
- Fundicion, Moldeo y Procesos Afines (Unidad 2) . - Procesos de FabricacionDocument31 pagesFundicion, Moldeo y Procesos Afines (Unidad 2) . - Procesos de FabricacionZendejas Ballesteros RafaelPas encore d'évaluation
- Cizallado PDFDocument10 pagesCizallado PDFleogrignafini100% (1)
- Procesos Sin Arranque de VirutaDocument17 pagesProcesos Sin Arranque de VirutaMisael LopeezPas encore d'évaluation
- Tolerancias GeometricasDocument9 pagesTolerancias GeometricasAlexis DarioPas encore d'évaluation
- Lab Circulo de MohrDocument11 pagesLab Circulo de MohrEmerson MayorgaPas encore d'évaluation
- SOLDADURA CON HAZ DE ELECTRONES FinalDocument28 pagesSOLDADURA CON HAZ DE ELECTRONES FinalRey David Castillo VegaPas encore d'évaluation
- Moldeo y ProyeccionDocument7 pagesMoldeo y ProyeccionGustavo BermudezPas encore d'évaluation
- Mecanizado de Piezas FresadoraDocument25 pagesMecanizado de Piezas FresadoraAngelPas encore d'évaluation
- Tratamiento Térmico TempleDocument16 pagesTratamiento Térmico TempleAlexFYGPPas encore d'évaluation
- Estirado en Frio y Caliente PDFDocument5 pagesEstirado en Frio y Caliente PDFIrving Mireles Reyes100% (1)
- Taller de MetalurgiaDocument10 pagesTaller de MetalurgiaWilmer Albeiro100% (1)
- Difusión de Los Metales - Grupo 02 - MaterialesDocument9 pagesDifusión de Los Metales - Grupo 02 - MaterialesAndy Aldair Silupu Aleman100% (1)
- Aceros Grado HerramientaDocument2 pagesAceros Grado HerramientaAna RodriguezPas encore d'évaluation
- Lab N3 - Ondas y ParticulasDocument9 pagesLab N3 - Ondas y Particulascarlos muñozPas encore d'évaluation
- 3 - Diseño de MoldesDocument3 pages3 - Diseño de MoldesDomingoj. SeguraPas encore d'évaluation
- Practica Ensayo de FlexionDocument17 pagesPractica Ensayo de FlexionCarlos LuceroPas encore d'évaluation
- Procesos para La Obtención de Las Matrices CerámicasDocument8 pagesProcesos para La Obtención de Las Matrices CerámicasYessenia Huachaca CasquinaPas encore d'évaluation
- Proceso de Estirado HerlyDocument14 pagesProceso de Estirado HerlyOmar ZapataPas encore d'évaluation
- Propiedades Opticas y MagneticasDocument7 pagesPropiedades Opticas y MagneticasMaría Gabriela ColmenaresPas encore d'évaluation
- Vaciado en ArenaDocument37 pagesVaciado en ArenaClaudia CornejoPas encore d'évaluation
- Moldes 2Document8 pagesMoldes 2Raul Córdova MermaPas encore d'évaluation
- Resortes UNTDocument17 pagesResortes UNTAnthony Quiroz LeonPas encore d'évaluation
- Aluminio 6061Document16 pagesAluminio 6061Alex MartinezPas encore d'évaluation
- 3.4 Proceso Deformacion en FrioDocument14 pages3.4 Proceso Deformacion en FrioSantiagoFdezPas encore d'évaluation
- Trabajo de Procesos de FabricacionDocument35 pagesTrabajo de Procesos de Fabricaciondilena406Pas encore d'évaluation
- RevenidoDocument3 pagesRevenidoedymiranda93Pas encore d'évaluation
- Esfuerzos Combinados Ya PDFDocument4 pagesEsfuerzos Combinados Ya PDFEric CesiasPas encore d'évaluation
- La Historia de La Unión de Metales Se Remonta A Varios MileniosDocument9 pagesLa Historia de La Unión de Metales Se Remonta A Varios MileniosscribdreiPas encore d'évaluation
- CIZALLADODocument7 pagesCIZALLADOVioleta Barrera RamirezPas encore d'évaluation
- Proceso de DeformacionDocument58 pagesProceso de DeformacionJen AlPas encore d'évaluation
- Rectificado Procesos de Fabricacion PDFDocument30 pagesRectificado Procesos de Fabricacion PDFAngelGabrielZayasBPas encore d'évaluation
- NIOSHDocument20 pagesNIOSHJoaquín Treviño100% (1)
- Test NDocument4 pagesTest NJuan Carlos VelasquezPas encore d'évaluation
- Ecuaciones LaminadoDocument2 pagesEcuaciones LaminadoJuan Pablo A A100% (2)
- Formacion de La VirutaDocument31 pagesFormacion de La VirutaTzuika Rios Aranda100% (3)
- Fundamentos Del Formado de MetalDocument110 pagesFundamentos Del Formado de MetalDarrel IrigoyenPas encore d'évaluation
- Ensayo JominyDocument5 pagesEnsayo JominyGabriela GimenezPas encore d'évaluation
- Practica N°2 (Metales 1)Document8 pagesPractica N°2 (Metales 1)RICHARD GONZALO YTO YTOPas encore d'évaluation
- 1 Tolerancias GeometricasDocument18 pages1 Tolerancias Geometricashugo_hugoPas encore d'évaluation
- Fundamentos de Manufactura ModernaDocument19 pagesFundamentos de Manufactura ModernaGary De LeonPas encore d'évaluation
- DurómetroDocument11 pagesDurómetro240593arPas encore d'évaluation
- Ciencia e Ingenieria de Materiales - Estructura, Arreglos y Movimientos de ÁtomosDocument5 pagesCiencia e Ingenieria de Materiales - Estructura, Arreglos y Movimientos de ÁtomosRally DiazPas encore d'évaluation
- Cuestionario de Materiales IDocument18 pagesCuestionario de Materiales IasdeldeltanPas encore d'évaluation
- Preguntas de Ciencia Delos MaterialesDocument2 pagesPreguntas de Ciencia Delos Materialespatricio-1703Pas encore d'évaluation
- Proceso de LaminacionDocument9 pagesProceso de LaminacionsupersonicogtPas encore d'évaluation
- Examen 4 Engranes PDFDocument5 pagesExamen 4 Engranes PDFCharles LeclercPas encore d'évaluation
- Manufactura de Materiales No MetálicosDocument25 pagesManufactura de Materiales No MetálicosEdgar Hernandez Arrieta100% (1)
- 2 Esfuerzo DeformacionDocument23 pages2 Esfuerzo DeformacionLuchito CtPas encore d'évaluation
- CLASE4Document24 pagesCLASE4yaremi MejiaPas encore d'évaluation
- Tema 5 Rotacion Del Solido Rigido PDFDocument26 pagesTema 5 Rotacion Del Solido Rigido PDFFrancisco CupenPas encore d'évaluation
- Diapositivas DinámicaDocument75 pagesDiapositivas DinámicaEnriquez IvanPas encore d'évaluation
- 5 Dinámica RotacionalDocument40 pages5 Dinámica RotacionalIsrael CGPas encore d'évaluation
- Clase14 Tema4.Dinamica Del ManipuladorDocument35 pagesClase14 Tema4.Dinamica Del ManipuladorJean Carlos VillegasPas encore d'évaluation
- Clase26 Tema6.Programación de RobotsDocument34 pagesClase26 Tema6.Programación de RobotsJean Carlos VillegasPas encore d'évaluation
- Clase16 Tema4.EulerLagrangeDocument87 pagesClase16 Tema4.EulerLagrangeJean Carlos VillegasPas encore d'évaluation
- Clase25 Tema6.Programación de RobotsDocument60 pagesClase25 Tema6.Programación de RobotsJean Carlos VillegasPas encore d'évaluation
- Clase24 Tema6.Programación de RobotsDocument39 pagesClase24 Tema6.Programación de RobotsJean Carlos VillegasPas encore d'évaluation
- Clase16 Tema4.EulerLagrangeDocument87 pagesClase16 Tema4.EulerLagrangeJean Carlos VillegasPas encore d'évaluation
- Clase18 Tema5.Generación de TrayectoriasDocument25 pagesClase18 Tema5.Generación de TrayectoriasJean Carlos VillegasPas encore d'évaluation
- Uno de Los Mejores Regalos Que Nos Brindan Las Especificaciones OSI Es Allanar El Camino para La Transferencia de Datos Entre Hosts Dispares Que Ejecutan Diferentes Sistemas OperativosDocument11 pagesUno de Los Mejores Regalos Que Nos Brindan Las Especificaciones OSI Es Allanar El Camino para La Transferencia de Datos Entre Hosts Dispares Que Ejecutan Diferentes Sistemas OperativosJean Carlos VillegasPas encore d'évaluation
- Tareas EpiiDocument10 pagesTareas EpiiEDUPas encore d'évaluation
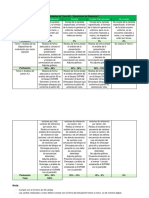
- Rúbrica de Tarea10Document3 pagesRúbrica de Tarea10Jean Carlos VillegasPas encore d'évaluation
- TALLERES (1) Grupo 1Document14 pagesTALLERES (1) Grupo 1Jean Carlos VillegasPas encore d'évaluation
- Clase14 Tema4.Dinamica Del ManipuladorDocument35 pagesClase14 Tema4.Dinamica Del ManipuladorJean Carlos VillegasPas encore d'évaluation
- TA 6 Tema2-3Document4 pagesTA 6 Tema2-3Jean Carlos VillegasPas encore d'évaluation
- Rúbrica de Tarea10Document3 pagesRúbrica de Tarea10Jean Carlos VillegasPas encore d'évaluation
- Rúbrica de Tarea10Document3 pagesRúbrica de Tarea10Jean Carlos VillegasPas encore d'évaluation
- Clase26 Tema6.Programación de RobotsDocument34 pagesClase26 Tema6.Programación de RobotsJean Carlos VillegasPas encore d'évaluation
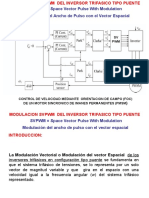
- 1 SVPWMDocument130 pages1 SVPWMJean Carlos VillegasPas encore d'évaluation
- Entregable 49168 PG05-PY21-05 201229373Document21 pagesEntregable 49168 PG05-PY21-05 201229373Jean Carlos VillegasPas encore d'évaluation
- Entregable 49160 PG05-PY21-05 201229373Document19 pagesEntregable 49160 PG05-PY21-05 201229373Jean Carlos VillegasPas encore d'évaluation
- 1323dffff PDFDocument6 pages1323dffff PDFJean Carlos VillegasPas encore d'évaluation
- Taller Formativo Problema o Necesidad.Document3 pagesTaller Formativo Problema o Necesidad.Jean Carlos VillegasPas encore d'évaluation
- Ta 3 PDFDocument3 pagesTa 3 PDFJean Carlos VillegasPas encore d'évaluation
- Rúbrica de Tarea10Document3 pagesRúbrica de Tarea10Jean Carlos VillegasPas encore d'évaluation
- Rúbrica de Tarea10Document3 pagesRúbrica de Tarea10Jean Carlos VillegasPas encore d'évaluation
- Generalidades 1 PDFDocument184 pagesGeneralidades 1 PDFJean Carlos VillegasPas encore d'évaluation
- Documentos de InstrumentaciónDocument6 pagesDocumentos de InstrumentaciónJean Carlos VillegasPas encore d'évaluation
- T5 Jean Villegas InformeDocument24 pagesT5 Jean Villegas InformeJean Carlos VillegasPas encore d'évaluation
- Formato P4Document9 pagesFormato P4Jean Carlos VillegasPas encore d'évaluation
- T5 Jean Villegas informeDDDDDocument27 pagesT5 Jean Villegas informeDDDDJean Carlos VillegasPas encore d'évaluation
- Encuesta Satisfacción de EmpresaDocument1 pageEncuesta Satisfacción de EmpresaLaam AlexPas encore d'évaluation
- HT-Raloy Diesel Serie 5 Plus SAE 50 CF2Document1 pageHT-Raloy Diesel Serie 5 Plus SAE 50 CF2Sebastian Eduardo Nestoso LazaroPas encore d'évaluation
- Qgisss PDFDocument405 pagesQgisss PDFA-k AmandaPas encore d'évaluation
- El Standard Robusto para Aplicaciones en Condiciones Del Entorno AdversasDocument28 pagesEl Standard Robusto para Aplicaciones en Condiciones Del Entorno AdversasWillyPas encore d'évaluation
- Circuitos en Serie y Paralelo PDFDocument13 pagesCircuitos en Serie y Paralelo PDFleafarsur100% (1)
- Informe No 001-2021-IEI-FIC-UNCP Plan de Trabajo Año 2021 AAMPDocument8 pagesInforme No 001-2021-IEI-FIC-UNCP Plan de Trabajo Año 2021 AAMPEros Alvin Airthon Damas QuispePas encore d'évaluation
- PRECOMISIONADODocument9 pagesPRECOMISIONADOAlfredo R LarezPas encore d'évaluation
- Ficha Técnica Junta Universal CardánicaDocument3 pagesFicha Técnica Junta Universal CardánicaasdfPas encore d'évaluation
- 10 - PasarelasDocument37 pages10 - PasarelasMathias Bonilla100% (1)
- Reporte Fotografico GOTERAS - 25!06!21 ConstructoDocument20 pagesReporte Fotografico GOTERAS - 25!06!21 ConstructojulioPas encore d'évaluation
- Nec Se Vivienda Parte 1Document40 pagesNec Se Vivienda Parte 1Edison CampoverdePas encore d'évaluation
- M.A.S y M.A.ADocument15 pagesM.A.S y M.A.AMarcos Nuñez ZuninoPas encore d'évaluation
- Naturaleza 2da Guia PedagógicaDocument4 pagesNaturaleza 2da Guia PedagógicaAndrea SimancasPas encore d'évaluation
- 2.1 Cinematica de La Particula 01Document19 pages2.1 Cinematica de La Particula 01eriPas encore d'évaluation
- THD - Pentesting Con BackTrackDocument99 pagesTHD - Pentesting Con BackTrackMauricio Lara ParraPas encore d'évaluation
- Bec-r-A-03.17 DC Jefe de AdquisicionesDocument2 pagesBec-r-A-03.17 DC Jefe de AdquisicionesIsaac CornejosalvoPas encore d'évaluation
- Reporte de Manometro CaseroDocument4 pagesReporte de Manometro CaseroULISES ANTONIO DE LA CRUZ VENEGASPas encore d'évaluation
- Tablas de Dosificación de ConcretoDocument3 pagesTablas de Dosificación de ConcretoAxel Martínez Nieto100% (3)
- Temperatura y Fluidos de CorteDocument30 pagesTemperatura y Fluidos de CorteLuis PulloquingaPas encore d'évaluation
- Soldadura MejiaDocument28 pagesSoldadura MejiaMilton AlfaroPas encore d'évaluation
- DrywallDocument5 pagesDrywallfdiaz12Pas encore d'évaluation
- Precios General 1-1 Coniva2015Document39 pagesPrecios General 1-1 Coniva2015Rodrigo Lope FloresPas encore d'évaluation
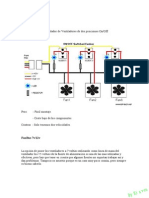
- Baybus - FanBus - RheoBus - ElectroBus - PWM - 220VDocument17 pagesBaybus - FanBus - RheoBus - ElectroBus - PWM - 220VanimalenlataPas encore d'évaluation
- Capacitor MicroondasDocument1 pageCapacitor MicroondasBaltazar VargasPas encore d'évaluation
- Libro 2Document12 pagesLibro 2Fredy Fernández GómezPas encore d'évaluation
- Entendiendo Expresiones Lambda en C#Document6 pagesEntendiendo Expresiones Lambda en C#Martin MarquezPas encore d'évaluation
- Teclas para Arranque PCDocument3 pagesTeclas para Arranque PCAndres Mauricio HernandezPas encore d'évaluation