Vous aimerez peut-être aussi
- Gehl DL Series Parts Manual (I-Cast)Document442 pagesGehl DL Series Parts Manual (I-Cast)Seth BarbourPas encore d'évaluation
- Fuse Box E120Document3 pagesFuse Box E120Shahmeer AhmedPas encore d'évaluation
- Piper 761-538 Warrior PC v2009Document422 pagesPiper 761-538 Warrior PC v2009df100% (1)
- Numerical Modeling of Geogrid Reinforced Flexible Pave 2016 Construction andDocument17 pagesNumerical Modeling of Geogrid Reinforced Flexible Pave 2016 Construction andHanamant HunashikattiPas encore d'évaluation
- Basic Turbo Chargers Technicians Reference BookDocument38 pagesBasic Turbo Chargers Technicians Reference BookMichelle Jones100% (2)
- 2016 Chevrolet Cruze Owners Manual PDFDocument377 pages2016 Chevrolet Cruze Owners Manual PDFcoolguy19895Pas encore d'évaluation
- WDS Wiring Diagram SystemDocument1 pageWDS Wiring Diagram SystemAlexei BetosPas encore d'évaluation
- Marine CaterpillarDocument4 pagesMarine CaterpillarFelipe Emanuel Basniak SilvaPas encore d'évaluation
- SECTION 6004 Mechanical Rear Wheel Drive (MODELS 120 - 155)Document56 pagesSECTION 6004 Mechanical Rear Wheel Drive (MODELS 120 - 155)lungu mihaiPas encore d'évaluation
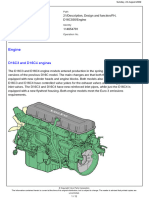
- Volvo D7FDocument38 pagesVolvo D7Fmarcos astete67% (3)
- Pavement Rehabilitation &management Introduction LectureDocument53 pagesPavement Rehabilitation &management Introduction LectureHadia JahangirPas encore d'évaluation
- TOYOTA 1CD-FTV D4D Engine FuelDocument27 pagesTOYOTA 1CD-FTV D4D Engine FuelLuis Daniel Cortes100% (16)
- Automated Highway SystemDocument25 pagesAutomated Highway SystemAniruddha Basu100% (1)
- List of Symbols and AbbreviationsDocument51 pagesList of Symbols and Abbreviationsganesh100% (1)
- B15 18 20T-5 (Sb1065e14)Document376 pagesB15 18 20T-5 (Sb1065e14)GORD100% (2)
- Intelligent Transportation SystemDocument31 pagesIntelligent Transportation SystemswapnilPas encore d'évaluation
- On Modified BitumenDocument19 pagesOn Modified BitumenTejeshwini SPas encore d'évaluation
- Advanced Pavement DesignsDocument6 pagesAdvanced Pavement DesignsJackie CrowellPas encore d'évaluation
- Swami Ramanand Teerth Marathwada University, NandedDocument4 pagesSwami Ramanand Teerth Marathwada University, NandedKanhaiyya PatilPas encore d'évaluation
- MAX50 Oper & Maint ManualDocument166 pagesMAX50 Oper & Maint Manualmarjan mircevskiPas encore d'évaluation
- Mini Project Advance PavementsDocument39 pagesMini Project Advance PavementsSD TECHPas encore d'évaluation
- Footpath Design HandoutDocument29 pagesFootpath Design Handoutanjali gajbhiyePas encore d'évaluation
- Track Maintenance For High Speed RailDocument19 pagesTrack Maintenance For High Speed RailHemanth UsPas encore d'évaluation
- Paper - Singapore ITSC The Heart of Traffic Monitoring & ControlDocument7 pagesPaper - Singapore ITSC The Heart of Traffic Monitoring & Controlnan100% (1)
- National Automated Highway System Research Program (1994 1997) Intelligent Vehicle Initiative ProgramDocument30 pagesNational Automated Highway System Research Program (1994 1997) Intelligent Vehicle Initiative ProgramAnand Tatte100% (1)
- Factors Affecting Pavement Design PDFDocument2 pagesFactors Affecting Pavement Design PDFKris33% (3)
- Bituminous (Asphalt) Road At: A Summer Training Report OnDocument22 pagesBituminous (Asphalt) Road At: A Summer Training Report OnPrafful BahiramPas encore d'évaluation
- Pavement Condition Analysis Using GISDocument6 pagesPavement Condition Analysis Using GISAmul ShresthaPas encore d'évaluation
- Practical Application of Pervious Concrete - Mix Designs That Are WorkableDocument20 pagesPractical Application of Pervious Concrete - Mix Designs That Are WorkablePJ FlexirPas encore d'évaluation
- Ready Mix Concrete: Technical Seminar Report OnDocument7 pagesReady Mix Concrete: Technical Seminar Report OnadityaPas encore d'évaluation
- ICT For Road Safety by Saroj Kumar Pradhan Road Department PDFDocument18 pagesICT For Road Safety by Saroj Kumar Pradhan Road Department PDFMohd NasharuddinPas encore d'évaluation
- PD Lab 8CE4-22Document32 pagesPD Lab 8CE4-22tech hubPas encore d'évaluation
- Plastic Cell Filled Concrete Road: A Review: MR - Piyush Madke, Prof. Shrikant HarleDocument15 pagesPlastic Cell Filled Concrete Road: A Review: MR - Piyush Madke, Prof. Shrikant HarleSABARINATHAN P JPas encore d'évaluation
- "Flexible Pavement: Presentation On Seminar EntitledDocument15 pages"Flexible Pavement: Presentation On Seminar EntitledKamlesh chaudhariPas encore d'évaluation
- Railways and Airports and Harbour Engineering - Lecture Notes, Study Material and Important Questions, AnswersDocument43 pagesRailways and Airports and Harbour Engineering - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVPas encore d'évaluation
- Seminar Report On Automated Highway System: Mudit Srivastava 11610040 6 Semester, C-3Document28 pagesSeminar Report On Automated Highway System: Mudit Srivastava 11610040 6 Semester, C-3Mudit SrivastavaPas encore d'évaluation
- Plastic Road ReportDocument6 pagesPlastic Road ReportsrivinaymnPas encore d'évaluation
- Unit 3 Urban Transport ProblemsDocument16 pagesUnit 3 Urban Transport ProblemspercyPas encore d'évaluation
- Sky Bus Metro Presentation by B RajaramDocument10 pagesSky Bus Metro Presentation by B RajaramtalkmanPas encore d'évaluation
- Time Occupancy As Measure of PCU at Four Legged RoundaboutsDocument13 pagesTime Occupancy As Measure of PCU at Four Legged Roundaboutsasd100% (1)
- Controlling of Traffic Using Movable Road DividersDocument3 pagesControlling of Traffic Using Movable Road DividersInternational Journal of Innovative Science and Research TechnologyPas encore d'évaluation
- Eastern Peripheral Expressway (Epe)Document26 pagesEastern Peripheral Expressway (Epe)balaPas encore d'évaluation
- Unit - 3 Pavement Design# - A4Document41 pagesUnit - 3 Pavement Design# - A4Raghuram Vadiboyena VPas encore d'évaluation
- Skybus MetroDocument3 pagesSkybus MetroAnjanKumarMahantaPas encore d'évaluation
- Abstract and Bridge DescriptionDocument2 pagesAbstract and Bridge Descriptiongalaxynote21993Pas encore d'évaluation
- Civil-Vii-Pavement Materials and Construction (10CV763) - SolutionDocument36 pagesCivil-Vii-Pavement Materials and Construction (10CV763) - SolutionLokesh KPas encore d'évaluation
- Seminar ReportDocument29 pagesSeminar ReportSreelakshmi Mohan100% (1)
- Innovia 300 PDFDocument2 pagesInnovia 300 PDFRubén Cuán RPas encore d'évaluation
- Spot Speed StudyDocument4 pagesSpot Speed StudyMohit KohliPas encore d'évaluation
- Civil Engineering Seminar Topics - Mivan TechnologyDocument17 pagesCivil Engineering Seminar Topics - Mivan TechnologyNikhil ThotePas encore d'évaluation
- Report On Black Spot AnalysisDocument45 pagesReport On Black Spot AnalysisJitu Meena100% (2)
- Analysis of Pedestrian Vehicle Interactions and Delay PDFDocument5 pagesAnalysis of Pedestrian Vehicle Interactions and Delay PDFvalPas encore d'évaluation
- PROJECT REPORT (ITS) - Mini Project-Bipin PatilDocument51 pagesPROJECT REPORT (ITS) - Mini Project-Bipin PatilashoknrPas encore d'évaluation
- Third Month Internship ReportDocument3 pagesThird Month Internship Reporthenok aklewegPas encore d'évaluation
- Academic Site Visit Report On Design of Steel Structures at Kimaya SteelDocument16 pagesAcademic Site Visit Report On Design of Steel Structures at Kimaya SteelKiranMDeorePas encore d'évaluation
- ProjectDocument58 pagesProjectsanjeet kumar sinhaPas encore d'évaluation
- RajatDocument22 pagesRajatRajat PalPas encore d'évaluation
- New Seminar ReportDocument20 pagesNew Seminar ReportThockanattu Varkey MathewPas encore d'évaluation
- ATMOSPHERIC WATER GENERATOR Project Report Unais PPDocument27 pagesATMOSPHERIC WATER GENERATOR Project Report Unais PPThe REBELPas encore d'évaluation
- Pavement Design 2013 ProjectDocument58 pagesPavement Design 2013 ProjectEr Mukesh PawarPas encore d'évaluation
- 002 - Preliminary SectionsDocument17 pages002 - Preliminary SectionssamPas encore d'évaluation
- Chapter 3 PDFDocument17 pagesChapter 3 PDF123Pas encore d'évaluation
- Industrial Training Project Report ON Rural Roads Construction Under Pmgsy ProgrammeDocument33 pagesIndustrial Training Project Report ON Rural Roads Construction Under Pmgsy ProgrammeNandu KingsPas encore d'évaluation
- Speed and Delay Study On National HighwayDocument20 pagesSpeed and Delay Study On National HighwayAshutosh Arun100% (1)
- Transportation Engineering 1 Question Bank - Mumbai UniversityDocument10 pagesTransportation Engineering 1 Question Bank - Mumbai UniversityMegha Thomas0% (1)
- Use of Stone Matrix Asphalt in Perpetual PavementDocument10 pagesUse of Stone Matrix Asphalt in Perpetual PavementswarajPas encore d'évaluation
- Requirements of Bituminous MixesDocument2 pagesRequirements of Bituminous MixesRajesh KhadkaPas encore d'évaluation
- Revised Project Proposal: Dr. Pabitra RajbongshiDocument27 pagesRevised Project Proposal: Dr. Pabitra RajbongshiZAKIR MIRPas encore d'évaluation
- Chapter-1 Tunnel EIADocument5 pagesChapter-1 Tunnel EIAGeorge K GeorgePas encore d'évaluation
- Plastic Roads A Seminar Report SubmittedDocument23 pagesPlastic Roads A Seminar Report SubmittedSharath SharathPas encore d'évaluation
- Traffic AssignmentDocument19 pagesTraffic Assignmentレルス ツンデ100% (1)
- Ian Fraser Highways Agency: Co-Operative Vehicle - Highway Systems ResearchDocument29 pagesIan Fraser Highways Agency: Co-Operative Vehicle - Highway Systems ResearchnishanthPas encore d'évaluation
- Itfvha01-Ukha - FraserDocument29 pagesItfvha01-Ukha - FraserSowmya SwayampakulaPas encore d'évaluation
- IA B.E Civil Semester4 DivisionADocument3 pagesIA B.E Civil Semester4 DivisionAHanamant HunashikattiPas encore d'évaluation
- Kle - Dr.M.S.S.Sheshagiri Collage of Engineering and Technology, BelagaviDocument1 pageKle - Dr.M.S.S.Sheshagiri Collage of Engineering and Technology, BelagaviHanamant HunashikattiPas encore d'évaluation
- BBD Site & Soil ReadingDocument24 pagesBBD Site & Soil ReadingHanamant HunashikattiPas encore d'évaluation
- Kle. Dr.M.S.Shesgiri College of Engineering & Technology: Automatic Road Analyzer (Aran)Document1 pageKle. Dr.M.S.Shesgiri College of Engineering & Technology: Automatic Road Analyzer (Aran)Hanamant HunashikattiPas encore d'évaluation
- TH THDocument2 pagesTH THHanamant HunashikattiPas encore d'évaluation
- Brochure FinalDocument2 pagesBrochure FinalHanamant HunashikattiPas encore d'évaluation
- Charimath BLGM Model - PDF 2Document1 pageCharimath BLGM Model - PDF 2Hanamant HunashikattiPas encore d'évaluation
- Application of Semi Analytical Finite Element M 2015 Journal of Traffic andDocument11 pagesApplication of Semi Analytical Finite Element M 2015 Journal of Traffic andHanamant HunashikattiPas encore d'évaluation
- Schedule (Pavement Evaluation and Rehabilitation) Day 1: 7 Sep 2017 Time Theme SpeakerDocument1 pageSchedule (Pavement Evaluation and Rehabilitation) Day 1: 7 Sep 2017 Time Theme SpeakerHanamant HunashikattiPas encore d'évaluation
- Department of Civil Engineering: Kle Dr.M.S. Sheshgiri College of Engineering & TechnologyDocument1 pageDepartment of Civil Engineering: Kle Dr.M.S. Sheshgiri College of Engineering & TechnologyHanamant HunashikattiPas encore d'évaluation
- REHABILITATION" Scheduled To Be Held During 7: Kle Dr. M. S. Sheshgiri College of Engineering and Technology, BelagaviDocument1 pageREHABILITATION" Scheduled To Be Held During 7: Kle Dr. M. S. Sheshgiri College of Engineering and Technology, BelagaviHanamant HunashikattiPas encore d'évaluation
- Dynamic Inelastic Analysis of 3 D Flexible Pavemen 2016 Soil Dynamics and EaDocument12 pagesDynamic Inelastic Analysis of 3 D Flexible Pavemen 2016 Soil Dynamics and EaHanamant HunashikattiPas encore d'évaluation
- Soil Dynamics and Earthquake Engineering: Niki D. Beskou, Stephanos V. Tsinopoulos, Dimitrios D. TheodorakopoulosDocument10 pagesSoil Dynamics and Earthquake Engineering: Niki D. Beskou, Stephanos V. Tsinopoulos, Dimitrios D. TheodorakopoulosHanamant HunashikattiPas encore d'évaluation
- Pavement Deterioration and Rehabilitation: Registration FormDocument2 pagesPavement Deterioration and Rehabilitation: Registration FormHanamant HunashikattiPas encore d'évaluation
- Transportation Engineering 2 2nd Ia 2016-17Document2 pagesTransportation Engineering 2 2nd Ia 2016-17Hanamant Hunashikatti100% (1)
- Apti Key 14.10Document1 pageApti Key 14.10Hanamant HunashikattiPas encore d'évaluation
- Conversion Van Owners Manual: 3 Years/36,000 MilesDocument62 pagesConversion Van Owners Manual: 3 Years/36,000 Mileskontaci9873Pas encore d'évaluation
- D3E8001E712-Engine Mechanical Fuel Injection and IgnitionDocument194 pagesD3E8001E712-Engine Mechanical Fuel Injection and IgnitionDaniel SerbanPas encore d'évaluation
- P0021 FA ScheduleDocument6 pagesP0021 FA SchedulewaqasismailPas encore d'évaluation
- Cadillac 1959 BrochureDocument17 pagesCadillac 1959 Brochureisland14Pas encore d'évaluation
- Chevrolet S-10 1999 - 2000 Fuse Box DiagramDocument3 pagesChevrolet S-10 1999 - 2000 Fuse Box DiagramLuisRodriguezPas encore d'évaluation
- Newsletter PDFDocument41 pagesNewsletter PDFDragan SorinPas encore d'évaluation
- IRITS0615079Pullstar Heavy Air FlyerDocument4 pagesIRITS0615079Pullstar Heavy Air FlyerShubham JainPas encore d'évaluation
- ENGINEd 16 CDocument12 pagesENGINEd 16 CMurniansyah AnsyahPas encore d'évaluation
- Diag - Diff Lock Wiring P94-1849 - 01: CompanyDocument13 pagesDiag - Diff Lock Wiring P94-1849 - 01: CompanyGonzalo GalvezPas encore d'évaluation
- FlexiLite Minibus Brochure April17 WEB PDFDocument8 pagesFlexiLite Minibus Brochure April17 WEB PDFLee JonesPas encore d'évaluation
- Morfológiai MátrixDocument1 pageMorfológiai MátrixpruglferencPas encore d'évaluation
- 501-05 Interior Trimming Panel and Trimming PICKUP JMCDocument14 pages501-05 Interior Trimming Panel and Trimming PICKUP JMCRusonegroPas encore d'évaluation
- Catalogue Edition 6.8 301012Document208 pagesCatalogue Edition 6.8 301012Ningmin TunPas encore d'évaluation
- L8 GSX150 P10 (9900B-20172) (Dea & Dza)Document138 pagesL8 GSX150 P10 (9900B-20172) (Dea & Dza)handlex hanoy castro ramirezPas encore d'évaluation
- Air Bag Restraint SystemDocument79 pagesAir Bag Restraint Systemjvazquez501Pas encore d'évaluation
- Cumulus - Eco Driving PresentationDocument9 pagesCumulus - Eco Driving PresentationRobert MartinezPas encore d'évaluation
- These All Part Nos Must Be Confirm From The Supplier As Per Our Machine SR#, Engine Model & SR# and Engine Family NosDocument1 pageThese All Part Nos Must Be Confirm From The Supplier As Per Our Machine SR#, Engine Model & SR# and Engine Family NosZAIN100% (2)
- Presentation On Maruti Suzuki: Presented by Tasduk HussianDocument25 pagesPresentation On Maruti Suzuki: Presented by Tasduk Hussianseemayadav_ssPas encore d'évaluation