Vous aimerez peut-être aussi
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- 20000pF0.020uF100Vbr Polyester Film Capacitor Packbr of 10 RM1501 by ROBOMART May 26 2022-9-52 AmDocument1 page20000pF0.020uF100Vbr Polyester Film Capacitor Packbr of 10 RM1501 by ROBOMART May 26 2022-9-52 AmmdayyubPas encore d'évaluation
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- IP Forwarding Linux / CentOSDocument1 pageIP Forwarding Linux / CentOSmdayyub100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- C Interview QuestionsDocument2 pagesC Interview QuestionsmdayyubPas encore d'évaluation
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- CentOS 6 Logical Volume ManagementDocument4 pagesCentOS 6 Logical Volume ManagementmdayyubPas encore d'évaluation
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Java IoDocument3 pagesJava IomdayyubPas encore d'évaluation
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Gain Root Access in The Single User Mode in Centos ? LinuxDocument3 pagesGain Root Access in The Single User Mode in Centos ? LinuxmdayyubPas encore d'évaluation
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Amazon - Web.services.2passeasy - Dop C01.practice - Test.2021 Jun 12.by - Nathaniel.155q.vceDocument28 pagesAmazon - Web.services.2passeasy - Dop C01.practice - Test.2021 Jun 12.by - Nathaniel.155q.vcemdayyubPas encore d'évaluation
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Technical Question and Answers in C, C++, DS, Oracle, UnixDocument176 pagesTechnical Question and Answers in C, C++, DS, Oracle, Unixapi-19750719Pas encore d'évaluation
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- Motion Less Electro-Magnetic GeneratorDocument21 pagesMotion Less Electro-Magnetic Generatormdayyub100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Refrigeration & Air ConditioningDocument15 pagesRefrigeration & Air ConditioningmdayyubPas encore d'évaluation
- Optimal Voltage Regulator Placement in A Radial Distribution System Using Fuzzy LogicDocument15 pagesOptimal Voltage Regulator Placement in A Radial Distribution System Using Fuzzy LogicmdayyubPas encore d'évaluation
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Controlling Electrical Appliances Through TV RemoteDocument14 pagesControlling Electrical Appliances Through TV Remotemdayyub100% (3)
- Power Generation Using Speed BreakersDocument23 pagesPower Generation Using Speed Breakersmdayyub80% (35)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Wireless PowerDocument14 pagesWireless PowermdayyubPas encore d'évaluation
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Performance of Single-Phase DC Drive System Controlled by Uniform PWM Full-Bridge DC-DC ConverterDocument10 pagesPerformance of Single-Phase DC Drive System Controlled by Uniform PWM Full-Bridge DC-DC ConvertermdayyubPas encore d'évaluation
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Automation of Power Distribution Using ScadaDocument17 pagesAutomation of Power Distribution Using Scadamdayyub0% (1)
- Virtual SurgeryDocument20 pagesVirtual Surgerymdayyub100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- Air Brake SystemDocument23 pagesAir Brake SystembalabooksPas encore d'évaluation
- HVDC Light Sreevidhya@StudentsDocument12 pagesHVDC Light Sreevidhya@StudentsKeerthi PriyankaPas encore d'évaluation
- Wireless Power TransmissionDocument9 pagesWireless Power TransmissionmdayyubPas encore d'évaluation
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Simultaneous Transmission of Ac and DC PowerDocument6 pagesSimultaneous Transmission of Ac and DC PowermdayyubPas encore d'évaluation
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- Lamp TechnologyDocument13 pagesLamp Technologymdayyub100% (1)
- Plant Condition MonitoringDocument12 pagesPlant Condition MonitoringmdayyubPas encore d'évaluation
- Internet Over Electric LinesDocument11 pagesInternet Over Electric LinesmdayyubPas encore d'évaluation
- Carrier OpptunitesDocument3 pagesCarrier OpptunitesmdayyubPas encore d'évaluation
- Artificial PassengerDocument4 pagesArtificial Passengermdayyub0% (1)
- Performance of Single-Phase DC Drive System Controlled by Uniform PWM Full-Bridge DC-DC ConverterDocument10 pagesPerformance of Single-Phase DC Drive System Controlled by Uniform PWM Full-Bridge DC-DC ConvertermdayyubPas encore d'évaluation
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Design of Control Signals For Uniform PWM Full-Bridge DC-DC ConverterDocument8 pagesDesign of Control Signals For Uniform PWM Full-Bridge DC-DC ConvertermdayyubPas encore d'évaluation
- Automatic Control Using Plc'sDocument9 pagesAutomatic Control Using Plc'smdayyubPas encore d'évaluation
- Addiction AvoiderDocument13 pagesAddiction AvoiderBujji RahulPas encore d'évaluation
- Capacitive Reactance Grob's Basic Electronics-11ed-18Document10 pagesCapacitive Reactance Grob's Basic Electronics-11ed-18Taufiq Fahlifi YfzerobrrPas encore d'évaluation
- Capacitor Bank Sizing ExamplesDocument29 pagesCapacitor Bank Sizing ExamplesRobert OtimPas encore d'évaluation
- 10 Key Points On Jamb PhysicsDocument12 pages10 Key Points On Jamb PhysicsAlex IkpePas encore d'évaluation
- 2572-Sonopuls 490-491 Service ManualDocument56 pages2572-Sonopuls 490-491 Service ManualJef Robbo100% (3)
- Advanced Electric Motor Predictive 1Document83 pagesAdvanced Electric Motor Predictive 1Jorge Alexander Prieto PabonPas encore d'évaluation
- CA110396en 03Document78 pagesCA110396en 03nmnicolauPas encore d'évaluation
- ASTM116 Astrophysical Plasmas Lecture Notes (QMUL)Document123 pagesASTM116 Astrophysical Plasmas Lecture Notes (QMUL)ucaptd3100% (1)
- A9F74110 DocumentDocument2 pagesA9F74110 DocumentLuceroGusmaninaPas encore d'évaluation
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Outdoor Circuit Breaker - Live TankDocument6 pagesOutdoor Circuit Breaker - Live Tankpspmania1Pas encore d'évaluation
- ThesisDocument54 pagesThesis60565882Pas encore d'évaluation
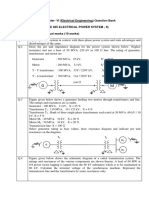
- BE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Document5 pagesBE Semester-VI (Electrical Engineering) Question Bank (E 605 Electrical Power System - Ii) All Questions Carry Equal Marks (10 Marks)Adesh Bhortakke100% (1)
- X6 Access Control System User Manual 20160229Document6 pagesX6 Access Control System User Manual 20160229Juan Rodriguez0% (1)
- Lecture No. 25 Three Phase Inverter 120 Conduction TypeDocument14 pagesLecture No. 25 Three Phase Inverter 120 Conduction TypeIslamic HubPas encore d'évaluation
- Elias - PX - BDA - 1 - 1Document36 pagesElias - PX - BDA - 1 - 1soundman11Pas encore d'évaluation
- 2018 Aperc 10Document127 pages2018 Aperc 10manojkumar3021Pas encore d'évaluation
- MAGNETIC LEVITATION TRAINS (SeminarDocument19 pagesMAGNETIC LEVITATION TRAINS (SeminarTejas KadamPas encore d'évaluation
- PHY 121 Tutorial 4Document2 pagesPHY 121 Tutorial 4Siiveh DlaminiPas encore d'évaluation
- Basic Electrical Part 2Document7 pagesBasic Electrical Part 2Abdul Basit MemonPas encore d'évaluation
- Flujometro SierraDocument52 pagesFlujometro SierraCapacitacion TodocatPas encore d'évaluation
- Payback CalculationDocument2 pagesPayback CalculationVenkat CherukuriPas encore d'évaluation
- Evaluation of Electromagnetic MetamaterialsDocument17 pagesEvaluation of Electromagnetic Metamaterialspedro1fonzecaPas encore d'évaluation
- That - DN140 (Verschoben) 9 PDFDocument1 pageThat - DN140 (Verschoben) 9 PDFsdtrnkPas encore d'évaluation
- CAD Slides 02Document45 pagesCAD Slides 02KyogbsyPas encore d'évaluation
- Re30058-Amplifier CardDocument16 pagesRe30058-Amplifier CardJamin SmtpngPas encore d'évaluation
- Adc Lab Manual STUDENTDocument59 pagesAdc Lab Manual STUDENTramPas encore d'évaluation
- The Photoelectric Effect PDFDocument4 pagesThe Photoelectric Effect PDFAamna ItazazPas encore d'évaluation
- Delhi Technological University: Result NotificationDocument4 pagesDelhi Technological University: Result NotificationHarsh SrivastavaPas encore d'évaluation
- Gammon Book of Safety Standards PDFDocument200 pagesGammon Book of Safety Standards PDFQuy Ha MinhPas encore d'évaluation
- Introduction To: Digital Signal ProcessingDocument11 pagesIntroduction To: Digital Signal Processingdeba_bhaPas encore d'évaluation