Vous aimerez peut-être aussi
- 112Document10 pages112Memo LyPas encore d'évaluation
- Ce0061 Professional Course 4 - (Specialized 2) Ste Track: Prestressed Concrete DesignDocument40 pagesCe0061 Professional Course 4 - (Specialized 2) Ste Track: Prestressed Concrete DesignjerichoPas encore d'évaluation
- 4 PrintDocument8 pages4 PrintsubyPas encore d'évaluation
- Serrano Rey John G. Plate 3Document17 pagesSerrano Rey John G. Plate 3Julius Theodore RiveraPas encore d'évaluation
- Item 803Document8 pagesItem 803Ester MarianPas encore d'évaluation
- Chapter 3b - Analysis of Tension MembersDocument56 pagesChapter 3b - Analysis of Tension MembersRami DemachkiPas encore d'évaluation
- Question Bank For TrafficDocument4 pagesQuestion Bank For TrafficjananiPas encore d'évaluation
- DIFFERENTIAL CALCULUS AND APPLICATIONSDocument2 pagesDIFFERENTIAL CALCULUS AND APPLICATIONSEricson CapuaPas encore d'évaluation
- Dynamics of Rigid Bodies CE 002 (TIP Reviewer)Document7 pagesDynamics of Rigid Bodies CE 002 (TIP Reviewer)James LindoPas encore d'évaluation
- Item 1018Document5 pagesItem 1018Ester MarianPas encore d'évaluation
- Mathalino - Double Integration MethodDocument38 pagesMathalino - Double Integration Methodanjibee100% (1)
- Portal Frame Method: General AssumptionsDocument4 pagesPortal Frame Method: General AssumptionsArslan QureshiPas encore d'évaluation
- V0L2 PDFDocument4 pagesV0L2 PDFJohannie Nina ClaridadPas encore d'évaluation
- Module 1 Quiz Solution PDFDocument4 pagesModule 1 Quiz Solution PDFBanana QPas encore d'évaluation
- Wall FootingDocument4 pagesWall FootingMunthir NumanPas encore d'évaluation
- A. Read The Following Book Chapters and Other Readings For ReferenceDocument4 pagesA. Read The Following Book Chapters and Other Readings For ReferenceJomar LampitokPas encore d'évaluation
- Influence Lines For Statically Determinate StructuresDocument52 pagesInfluence Lines For Statically Determinate StructuresDevin BookerPas encore d'évaluation
- 1 - Introduction To Steel Design PDFDocument9 pages1 - Introduction To Steel Design PDFNadine PascualPas encore d'évaluation
- DEDocument10 pagesDEosukotiPas encore d'évaluation
- PERMEABILITYDocument26 pagesPERMEABILITYChristian Felix MapilesPas encore d'évaluation
- Ce6702 DecDocument57 pagesCe6702 Decpmali2Pas encore d'évaluation
- Project Construction Management: Data SheetDocument8 pagesProject Construction Management: Data SheetyfcbrandonPas encore d'évaluation
- Homework 1 3Document6 pagesHomework 1 3inisdeprawn100% (2)
- Assignment TemplateDocument3 pagesAssignment TemplateAina Margauxe JacintoPas encore d'évaluation
- Planning, Analysis & Design of A Four-Stored Residential Bulding by Using Staad ProDocument2 pagesPlanning, Analysis & Design of A Four-Stored Residential Bulding by Using Staad ProDharma banothuPas encore d'évaluation
- Week 10: Non-Uniform Flow: University of Nueva Caceres College of Engineering and ArchitectureDocument5 pagesWeek 10: Non-Uniform Flow: University of Nueva Caceres College of Engineering and ArchitectureAngelica LosaresPas encore d'évaluation
- Le1 12102022 PMDocument1 pageLe1 12102022 PMRyiehmPas encore d'évaluation
- Engineering Economy: Ma. Leona Maye B. Pepito, MEDocument72 pagesEngineering Economy: Ma. Leona Maye B. Pepito, MELouie Ludeña VillegasPas encore d'évaluation
- Quantity Surveying / Engr. Romel N. VinguaDocument32 pagesQuantity Surveying / Engr. Romel N. VinguaBG GuillermoPas encore d'évaluation
- SuperelevationDocument28 pagesSuperelevationDumdum7Pas encore d'évaluation
- Prismoidal Formula 2Document11 pagesPrismoidal Formula 2anggaxkusumaPas encore d'évaluation
- Pi Diagnostic Test 094Document13 pagesPi Diagnostic Test 094Marc Louiese Lagatao100% (1)
- Average Daily TrafficDocument5 pagesAverage Daily TrafficHoney Lhien LucidoPas encore d'évaluation
- Chapter 6 - Serviceability PDFDocument45 pagesChapter 6 - Serviceability PDFJhe TaguinesPas encore d'évaluation
- Case-Study 1Document5 pagesCase-Study 1Frances Louise MarceloPas encore d'évaluation
- T Beams 1Document27 pagesT Beams 1Jonniel De GuzmanPas encore d'évaluation
- Chapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsDocument92 pagesChapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsRoutine Of Nepal BandaPas encore d'évaluation
- Ce 402 Expt 7-8Document16 pagesCe 402 Expt 7-8veeveegarcia_Pas encore d'évaluation
- Gis Located Above B)Document10 pagesGis Located Above B)Apple AterradoPas encore d'évaluation
- MATH Activity 7Document3 pagesMATH Activity 7EurydicePas encore d'évaluation
- Footing Ina MoDocument6 pagesFooting Ina MoHades HadesPas encore d'évaluation
- Fluid Mechanics Chapter 4 Jet ForcesDocument7 pagesFluid Mechanics Chapter 4 Jet ForcesAhmed SuhailPas encore d'évaluation
- Area Moment MethodDocument49 pagesArea Moment MethodJÜnn BatacPas encore d'évaluation
- 17-18.02.KA20403.ES .003.distance MeasurementDocument50 pages17-18.02.KA20403.ES .003.distance MeasurementBruh100% (1)
- Solution To Problem 648 - Deflection of Cantilever Beams - Strength of Materials ReviewDocument4 pagesSolution To Problem 648 - Deflection of Cantilever Beams - Strength of Materials ReviewJhundel Factor PajarillagaPas encore d'évaluation
- Elements of Roads and Highways by Max Fajardo 2nd EditionDocument2 pagesElements of Roads and Highways by Max Fajardo 2nd Editionjohnnoe delosreyes0% (1)
- A) Ability To Function On Multidisciplinary Teams B) Ability To Communicate EffectivelyDocument11 pagesA) Ability To Function On Multidisciplinary Teams B) Ability To Communicate EffectivelyJazcel GalsimPas encore d'évaluation
- The Long Chord From TheDocument5 pagesThe Long Chord From TheCheska FernandezPas encore d'évaluation
- This Study Resource Was: Civil Engineering LawDocument3 pagesThis Study Resource Was: Civil Engineering LawCn cnPas encore d'évaluation
- Comparison of Structural Design CodesDocument4 pagesComparison of Structural Design CodesMaria Rose Giltendez - BartianaPas encore d'évaluation
- Surveying FundamentalsDocument14 pagesSurveying FundamentalsJared RosePas encore d'évaluation
- Module 2 TranspoDocument95 pagesModule 2 TranspomarcusluismacusiPas encore d'évaluation
- Reversed Curves Engineering ModuleDocument8 pagesReversed Curves Engineering ModuleDirect XPas encore d'évaluation
- Curvilinear Motion and ProjectilesDocument15 pagesCurvilinear Motion and ProjectilesAltammar1367% (3)
- Chapter 12-15Document59 pagesChapter 12-15Abdulaziz FarhanPas encore d'évaluation
- PE2113-Chapter 12 - Dynamics - Draft1Document115 pagesPE2113-Chapter 12 - Dynamics - Draft1Mohammed AlkhalifaPas encore d'évaluation
- Lecture 12Document37 pagesLecture 12Sarah Rachel100% (1)
- Week 9 KinematicsDocument64 pagesWeek 9 Kinematicsiwhy_Pas encore d'évaluation
- EMGT 1100syallbus Fall2016!1!2Document3 pagesEMGT 1100syallbus Fall2016!1!2Vince HarrisPas encore d'évaluation
- 24 Composites 2Document45 pages24 Composites 2Vince HarrisPas encore d'évaluation
- Met 2110 Study Guide - Exam 1Document2 pagesMet 2110 Study Guide - Exam 1Vince HarrisPas encore d'évaluation
- Crystal StructuresDocument37 pagesCrystal StructuresVince HarrisPas encore d'évaluation
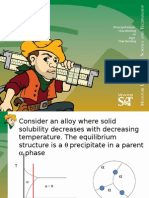
- Eutectic Phase Diagrams and Dispersion StrengtheningDocument48 pagesEutectic Phase Diagrams and Dispersion StrengtheningVince HarrisPas encore d'évaluation
- 15-Steel Part 03-2Document20 pages15-Steel Part 03-2Vince HarrisPas encore d'évaluation
- 05 DiffusionDocument29 pages05 DiffusionVince HarrisPas encore d'évaluation
- Precipitation Hardening: Coherent vs Noncoherent PrecipitatesDocument21 pagesPrecipitation Hardening: Coherent vs Noncoherent PrecipitatesVince HarrisPas encore d'évaluation
- 23 Polymers & Adhesives 4Document45 pages23 Polymers & Adhesives 4Vince HarrisPas encore d'évaluation
- Precipitation Hardening: Coherent vs Noncoherent PrecipitatesDocument21 pagesPrecipitation Hardening: Coherent vs Noncoherent PrecipitatesVince HarrisPas encore d'évaluation
- 03 Miller Indices 3Document18 pages03 Miller Indices 3Vince HarrisPas encore d'évaluation
- 06 Tensile TestDocument24 pages06 Tensile TestVince HarrisPas encore d'évaluation
- Impact of flex-fuels on modern gasoline enginesDocument2 pagesImpact of flex-fuels on modern gasoline enginesVince HarrisPas encore d'évaluation
- Fundamentals of Chip-Type Machining Processes - 1-2Document38 pagesFundamentals of Chip-Type Machining Processes - 1-2Vince HarrisPas encore d'évaluation
- Review of ThermodynamicsDocument29 pagesReview of ThermodynamicsVince HarrisPas encore d'évaluation
- Fundamentals of Chip-Type Machining Processes - 1-2Document38 pagesFundamentals of Chip-Type Machining Processes - 1-2Vince HarrisPas encore d'évaluation
- Review of ThermodynamicsDocument29 pagesReview of ThermodynamicsVince HarrisPas encore d'évaluation
- Lathe Operations Guide: Turning, Boring, Tapering, Knurling & MoreDocument12 pagesLathe Operations Guide: Turning, Boring, Tapering, Knurling & MoreVince HarrisPas encore d'évaluation
- Co Lligat Ive PropertiesDocument2 pagesCo Lligat Ive PropertiesVince HarrisPas encore d'évaluation
- Workholding DevicesDocument15 pagesWorkholding DevicesVince HarrisPas encore d'évaluation
- Workholding DevicesDocument15 pagesWorkholding DevicesVince HarrisPas encore d'évaluation
- SafetyDocument13 pagesSafetyVince HarrisPas encore d'évaluation
- Broaching, Sawing and Filing-2Document31 pagesBroaching, Sawing and Filing-2Vince HarrisPas encore d'évaluation
- Non Traditional MachiningDocument17 pagesNon Traditional MachiningVince HarrisPas encore d'évaluation
- Abrasive MachiningDocument20 pagesAbrasive MachiningVince HarrisPas encore d'évaluation
- Helpful Hints: Ionic BondingDocument4 pagesHelpful Hints: Ionic BondingVince HarrisPas encore d'évaluation
- Thread ManufacturingDocument17 pagesThread ManufacturingVince HarrisPas encore d'évaluation
- Helpful Guide to Solution Phases and MiscibilityDocument2 pagesHelpful Guide to Solution Phases and MiscibilityVince HarrisPas encore d'évaluation
- Co Lligat Ive PropertiesDocument2 pagesCo Lligat Ive PropertiesVince HarrisPas encore d'évaluation
- Motor Control TheoriesDocument26 pagesMotor Control TheoriesSardarChangezKhanPas encore d'évaluation
- Conductivité OptiqueDocument75 pagesConductivité OptiquevideolabPas encore d'évaluation
- B.E. - Chemical - 2011 2012Document64 pagesB.E. - Chemical - 2011 2012Sandeep SandyPas encore d'évaluation
- UntitledDocument100 pagesUntitledJade DigPas encore d'évaluation
- Eddy Current Testing Handbook Chapter SummariesDocument51 pagesEddy Current Testing Handbook Chapter SummariesMuh SubhanPas encore d'évaluation
- Stress Path AnalysisDocument21 pagesStress Path AnalysisHKDOCUMENTPas encore d'évaluation
- Mathematics Quiz 19 Solutions 18 Oct. 2021 PDFDocument12 pagesMathematics Quiz 19 Solutions 18 Oct. 2021 PDFGleb De GuzmanPas encore d'évaluation
- RK500-13 Online EC/Salinity Sensor: FeaturesDocument3 pagesRK500-13 Online EC/Salinity Sensor: FeaturesigreenPas encore d'évaluation
- Introduction To Engineering Analysis 4th Edition Hagen Solutions Manual 1Document94 pagesIntroduction To Engineering Analysis 4th Edition Hagen Solutions Manual 1virginia100% (48)
- Directional Combination Method (SRSSABS) PDFDocument1 pageDirectional Combination Method (SRSSABS) PDFluisalonsonucetteranPas encore d'évaluation
- Clariflocculator CalculationsDocument4 pagesClariflocculator Calculationssanu80% (5)
- Chemistry: Preparing For Key Stage 4 SuccessDocument9 pagesChemistry: Preparing For Key Stage 4 SuccessPaul0% (1)
- Lecture Note PPT 5 PDFDocument20 pagesLecture Note PPT 5 PDFDrRoja A RPas encore d'évaluation
- FOUR BASIC CONCEPTS Part 1Document38 pagesFOUR BASIC CONCEPTS Part 1Onecho Angelo GabinetePas encore d'évaluation
- The Difference Between Merkel and Poppe Models and Its in Uence On The Prediction of Wet-Cooling TowersDocument13 pagesThe Difference Between Merkel and Poppe Models and Its in Uence On The Prediction of Wet-Cooling TowersLam DesmondPas encore d'évaluation
- The Time Machine by HG Wells - Class WorkDocument3 pagesThe Time Machine by HG Wells - Class Workmohash1128Pas encore d'évaluation
- M.tech ThesisDocument58 pagesM.tech ThesisSudeesh Patel100% (1)
- INDUSTRIAL ELECTRONICS WELDING PROCESSESDocument212 pagesINDUSTRIAL ELECTRONICS WELDING PROCESSESReynald John PastranaPas encore d'évaluation
- Limit State Design of Steel Members To AS4100Document20 pagesLimit State Design of Steel Members To AS4100Sam ThomasPas encore d'évaluation
- GDP-POPDocument11 pagesGDP-POPOmja DwivediPas encore d'évaluation
- Routledge History of Philosophy Volume 10 Philosophy of Meaning, Knowledge and Value in The Twentieth Century - John V.canfieldDocument350 pagesRoutledge History of Philosophy Volume 10 Philosophy of Meaning, Knowledge and Value in The Twentieth Century - John V.canfieldGabriel Paiva Rega100% (2)
- Aircon Unit Maintenance PlanDocument5 pagesAircon Unit Maintenance PlanTESDA PasMakPas encore d'évaluation
- L00046 - 1 - En-01 - 2K Epoxy Primer Surfacer Water-Based Yellow Good Sandability Anti-Corrosion Eg For Trains (L00046 - 1)Document4 pagesL00046 - 1 - En-01 - 2K Epoxy Primer Surfacer Water-Based Yellow Good Sandability Anti-Corrosion Eg For Trains (L00046 - 1)Fabio Enrique Gomez RamirezPas encore d'évaluation
- Lessons in Electric Circuits, Volume I - DCDocument6 pagesLessons in Electric Circuits, Volume I - DCSitó KVPas encore d'évaluation
- Plasma Apocalypse Advanced Jay DreamerzDocument46 pagesPlasma Apocalypse Advanced Jay Dreamerztavdeash238Pas encore d'évaluation
- Chemistry Lab and Chemistry SyllabusDocument15 pagesChemistry Lab and Chemistry SyllabusNoah HernandezPas encore d'évaluation
- Answer Tutorial 3 & 4 Teaching Modul: Control System Theory: (S) /V(S) For The Circuit GivenDocument5 pagesAnswer Tutorial 3 & 4 Teaching Modul: Control System Theory: (S) /V(S) For The Circuit GivenMohammad Khairul Azmi Mohd KassimPas encore d'évaluation
- Cot QuestionDocument3 pagesCot QuestionRYAN CARLO LAPUAGPas encore d'évaluation
- Kepadatan Bekicot Pada Pertanaman NagaDocument6 pagesKepadatan Bekicot Pada Pertanaman NagaLixzen Christyan SagalaPas encore d'évaluation
- Roller Coaster Forces and HeightsDocument14 pagesRoller Coaster Forces and HeightsHafizh Renanto AkhmadPas encore d'évaluation