Vous aimerez peut-être aussi
- 12.215 Modern NavigationDocument19 pages12.215 Modern Navigationvonguyenphuong100% (1)
- Satellite Television: Analogue and Digital Reception TechniquesD'EverandSatellite Television: Analogue and Digital Reception TechniquesÉvaluation : 2.5 sur 5 étoiles2.5/5 (3)
- GNSS SignalsDocument72 pagesGNSS SignalsPraveen Chandran C RPas encore d'évaluation
- Chapter 3. The Global Positioning SystemDocument23 pagesChapter 3. The Global Positioning SystemAnita RayPas encore d'évaluation
- Binary Offset CarrierDocument20 pagesBinary Offset Carriernaitiknakrani1803Pas encore d'évaluation
- LTE Signaling: Troubleshooting and Performance MeasurementD'EverandLTE Signaling: Troubleshooting and Performance MeasurementPas encore d'évaluation
- Difference Between GPS and GALILEODocument45 pagesDifference Between GPS and GALILEORukku RukuPas encore d'évaluation
- Indoor Radio Planning: A Practical Guide for 2G, 3G and 4GD'EverandIndoor Radio Planning: A Practical Guide for 2G, 3G and 4GÉvaluation : 5 sur 5 étoiles5/5 (1)
- 02a GPS Constellation Signals S2 2022Document39 pages02a GPS Constellation Signals S2 2022Sweta BalakrishnaPas encore d'évaluation
- Aircraft Navigation and Flight Computers: Introduction of GPSDocument36 pagesAircraft Navigation and Flight Computers: Introduction of GPSJean ChanPas encore d'évaluation
- Satellite Communications: Principles and ApplicationsD'EverandSatellite Communications: Principles and ApplicationsÉvaluation : 5 sur 5 étoiles5/5 (2)
- final revision 2021 - abcdpdf - pdf - إلى - ووردDocument13 pagesfinal revision 2021 - abcdpdf - pdf - إلى - ووردkareem gamelPas encore d'évaluation
- Handbook of Defence Electronics and Optronics: Fundamentals, Technologies and SystemsD'EverandHandbook of Defence Electronics and Optronics: Fundamentals, Technologies and SystemsPas encore d'évaluation
- Chapter 2 GPS DetailsDocument15 pagesChapter 2 GPS DetailsIfa AsratPas encore d'évaluation
- ROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIOND'EverandROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONPas encore d'évaluation
- Lecture 5 - GPS Signal StructureDocument18 pagesLecture 5 - GPS Signal StructureBernalyn Manaog100% (1)
- Radio Access: Johan MonteliusDocument43 pagesRadio Access: Johan MonteliusJeffrey LeePas encore d'évaluation
- WDMWDMDocument40 pagesWDMWDMAbrar AhmadPas encore d'évaluation
- GPS SignalsDocument23 pagesGPS Signalskrishna144Pas encore d'évaluation
- 2021 - Mueller Etal - Outdoor Ranging and Positioning Based On LoRa ModulationDocument6 pages2021 - Mueller Etal - Outdoor Ranging and Positioning Based On LoRa ModulationAmutha VPas encore d'évaluation
- Spread Spectrum, DSSS, FHSS, THSS, CSS, OfdmDocument22 pagesSpread Spectrum, DSSS, FHSS, THSS, CSS, OfdmDr-Shashi Tj50% (2)
- GPS U4Document8 pagesGPS U4espectra2k23Pas encore d'évaluation
- PSAT2 User Operations Manual: Narrowband Receiver Challenge: The PSAT2 Comms Board Is Commercial Off TheDocument11 pagesPSAT2 User Operations Manual: Narrowband Receiver Challenge: The PSAT2 Comms Board Is Commercial Off TheGuilherme de AzevedoPas encore d'évaluation
- 03.nirkabel - WLANDocument31 pages03.nirkabel - WLANReni KurniaPas encore d'évaluation
- GPS Signals (C)Document23 pagesGPS Signals (C)indika2222Pas encore d'évaluation
- 5 Controller Area NetworksDocument55 pages5 Controller Area NetworksAli BassiounyPas encore d'évaluation
- MANET-Physical Layer IIDocument32 pagesMANET-Physical Layer IItanyagoswami11Pas encore d'évaluation
- GNSS - SDR Receivers: A-The Signal in Space (SIS)Document50 pagesGNSS - SDR Receivers: A-The Signal in Space (SIS)dangkitaPas encore d'évaluation
- Time Synchronizing Signal by GPS SatellitesDocument10 pagesTime Synchronizing Signal by GPS SatellitesAisha Sultan ZPas encore d'évaluation
- Transmission Overview-Final11Document173 pagesTransmission Overview-Final11Anonymous ITG3EeNPas encore d'évaluation
- Navigation Lecture 5thDocument7 pagesNavigation Lecture 5thali aliPas encore d'évaluation
- Principles of GPSDocument11 pagesPrinciples of GPSWong_Hong_Wei100% (1)
- Basic GPS Signals: Coarse/Acquisition CodeDocument12 pagesBasic GPS Signals: Coarse/Acquisition CodeJousie C. AminPas encore d'évaluation
- Emerging Wireless Standards2Document114 pagesEmerging Wireless Standards2smbokhari100% (1)
- ITA503 Mobile ComputingDocument215 pagesITA503 Mobile ComputingkhadarnawasPas encore d'évaluation
- 3a.1.2 - GPS ErrorsDocument34 pages3a.1.2 - GPS ErrorsParamjot SinghPas encore d'évaluation
- 5 IjsrmDocument5 pages5 IjsrmmaxamedPas encore d'évaluation
- Seminar On GPS: Part I Working of GPS/DGPS Part II Programming of GPSDocument43 pagesSeminar On GPS: Part I Working of GPS/DGPS Part II Programming of GPSNitesh KumarPas encore d'évaluation
- Lte Dimensioning 4 PDF FreeDocument213 pagesLte Dimensioning 4 PDF FreeTarek AhmedPas encore d'évaluation
- Advanced Lab in Computer Communications: Meeting 3 - Wi-Fi 802.11Document29 pagesAdvanced Lab in Computer Communications: Meeting 3 - Wi-Fi 802.11ferronatto11Pas encore d'évaluation
- Leased LineDocument22 pagesLeased LinenistalasantoshPas encore d'évaluation
- WCDMA Radio PlanningDocument20 pagesWCDMA Radio PlanningAhmed MoniemPas encore d'évaluation
- Network Planning Principle 1Document120 pagesNetwork Planning Principle 1sadfafasfdaPas encore d'évaluation
- Unit-2 GPS DetailsDocument13 pagesUnit-2 GPS Detailsdavesut3348Pas encore d'évaluation
- ECS455 - 5 - 1 - OFDM U1Document27 pagesECS455 - 5 - 1 - OFDM U1prapunPas encore d'évaluation
- Wcdma For Umts: Luc Vandendorpe UCL Communications and Remote Sensing LabDocument49 pagesWcdma For Umts: Luc Vandendorpe UCL Communications and Remote Sensing LabAngelica NaguitPas encore d'évaluation
- 02 - RN31542EN30GLA0 - Radio Network Planning FundamentalsDocument24 pages02 - RN31542EN30GLA0 - Radio Network Planning FundamentalsIbrahim UsmanPas encore d'évaluation
- Air InterfaceDocument11 pagesAir InterfaceBhosdiwale ChachaPas encore d'évaluation
- Ultra Wide Band TechnologyDocument31 pagesUltra Wide Band TechnologyManjunath N KammarPas encore d'évaluation
- 6 - 23 April 2010: GPS Receivers, Receiver Signals and Principals of OperationDocument198 pages6 - 23 April 2010: GPS Receivers, Receiver Signals and Principals of Operationaab0989Pas encore d'évaluation
- A DSP Implementation of OFDM Acoustic ModemDocument4 pagesA DSP Implementation of OFDM Acoustic ModemrettyrajaPas encore d'évaluation
- Ee50238 - NGC 7 - Dgnss LpsDocument12 pagesEe50238 - NGC 7 - Dgnss Lpsappleifxxkutill2046Pas encore d'évaluation
- Overview of The Third Generation Mobile CommunicationsDocument29 pagesOverview of The Third Generation Mobile CommunicationsHarish AgrahariPas encore d'évaluation
- 01-0-WCDMA Wireless Principle and Key Technology-102Document101 pages01-0-WCDMA Wireless Principle and Key Technology-102Cedrick MakambuPas encore d'évaluation
- Thompson2012 PDFDocument9 pagesThompson2012 PDFGayathri K MPas encore d'évaluation
- I BC NTL Reception MobileDocument12 pagesI BC NTL Reception MobileStarLink1Pas encore d'évaluation
- TD LTE Test CasesDocument5 pagesTD LTE Test CasesLihanbokPas encore d'évaluation
- Some Questions For RF TeamDocument1 pageSome Questions For RF TeamLihanbokPas encore d'évaluation
- ReadmeDocument1 pageReadmeLihanbokPas encore d'évaluation
- Set Vendor IDDocument1 pageSet Vendor IDLihanbokPas encore d'évaluation
- Some Questions For RF TeamDocument1 pageSome Questions For RF TeamLihanbokPas encore d'évaluation
- New Tham SoDocument1 pageNew Tham SoLihanbokPas encore d'évaluation
- Best Nikkor LensDocument28 pagesBest Nikkor LensLihanbokPas encore d'évaluation
- Cell PCH State - Some Questions AnsweredDocument18 pagesCell PCH State - Some Questions AnsweredLihanbokPas encore d'évaluation
- Ip UpDocument1 pageIp UpLihanbokPas encore d'évaluation
- Times To UpDocument3 pagesTimes To UpLihanbokPas encore d'évaluation
- Link Atoll DocumentDocument1 pageLink Atoll DocumentLihanbokPas encore d'évaluation
- CMDocument1 pageCMLihanbokPas encore d'évaluation
- Link For TestDocument1 pageLink For TestLihanbokPas encore d'évaluation
- Link For Test v1Document1 pageLink For Test v1LihanbokPas encore d'évaluation
- Read MeDocument1 pageRead MeLihanbokPas encore d'évaluation
- RRC State TransitionsDocument6 pagesRRC State TransitionseduokothPas encore d'évaluation
- Check Encode StatusDocument2 pagesCheck Encode StatusLihanbokPas encore d'évaluation
- Link For TestDocument1 pageLink For TestLihanbokPas encore d'évaluation
- Link For TestDocument1 pageLink For TestLihanbokPas encore d'évaluation
- Check Encode StatusDocument2 pagesCheck Encode StatusLihanbokPas encore d'évaluation
- Readme EngDocument2 pagesReadme EngLihanbokPas encore d'évaluation
- How To SetupDocument2 pagesHow To SetupFrancisco J LopezPas encore d'évaluation
- ImportantInfo RMSDocument1 pageImportantInfo RMSLihanbokPas encore d'évaluation
- 【资料名称】:Alcatel-Lucent W-CDMA UTRAN Parameters DescriptionDocument3 pages【资料名称】:Alcatel-Lucent W-CDMA UTRAN Parameters DescriptionLihanbokPas encore d'évaluation
- 3G KPI Formula Ericsson NSN HuaweiDocument24 pages3G KPI Formula Ericsson NSN HuaweiLihanbok100% (1)
- Call Trace User Guide V3.0Document60 pagesCall Trace User Guide V3.0ank_alexPas encore d'évaluation
- VLGDocument2 pagesVLGLihanbokPas encore d'évaluation
- Lect. 08 Che 185 - Laplace Transform and Transfer FunctionsxDocument35 pagesLect. 08 Che 185 - Laplace Transform and Transfer FunctionsxLihanbokPas encore d'évaluation
- Laplace TransformDocument69 pagesLaplace TransformLihanbokPas encore d'évaluation
- Finaln DocumentDocument52 pagesFinaln DocumentTemesgenPas encore d'évaluation
- 2session 27 Overview: Biomedical CircuitsDocument26 pages2session 27 Overview: Biomedical CircuitsGiang HoaiPas encore d'évaluation
- COVERLETTER (Rig Mechanic)Document1 pageCOVERLETTER (Rig Mechanic)shehryar khanPas encore d'évaluation
- Imm Star l10 08 07 17 v06Document4 pagesImm Star l10 08 07 17 v06Risto GodevPas encore d'évaluation
- 00 Cockpit DoorDocument18 pages00 Cockpit DoorKıvanc Terzioglu100% (1)
- General SpecificationDocument241 pagesGeneral Specificationcyong7788Pas encore d'évaluation
- Aberdeen Research Report Big Data AnalyticsDocument11 pagesAberdeen Research Report Big Data AnalyticsRosie3k90% (1)
- Dtec 2016 7731298Document7 pagesDtec 2016 7731298BalajiPas encore d'évaluation
- WTL Assignment No. 5Document7 pagesWTL Assignment No. 5Shubham KanchangirePas encore d'évaluation
- B2B Exchanges Info Sys MGTDocument8 pagesB2B Exchanges Info Sys MGTmaha yousefPas encore d'évaluation
- Ab PB SBDocument32 pagesAb PB SBAdda L Montero100% (1)
- Specification Sheet: Airco Inverter Chiller UnitsDocument7 pagesSpecification Sheet: Airco Inverter Chiller UnitsAhmed S. El DenPas encore d'évaluation
- User Manual-Sx Series IP CameraDocument52 pagesUser Manual-Sx Series IP CameraCarlos SaldanaPas encore d'évaluation
- Primary Connector Kit Compliance and Applications SpecificationsDocument2 pagesPrimary Connector Kit Compliance and Applications SpecificationsluisPas encore d'évaluation
- ch01 An Introduction To Digital Computer LogicDocument12 pagesch01 An Introduction To Digital Computer LogicKjay ThompsonPas encore d'évaluation
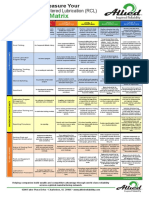
- Allied Maturity Matrix 14 Reliability Centered Lubrication PDFDocument2 pagesAllied Maturity Matrix 14 Reliability Centered Lubrication PDFHossein100% (1)
- Engineering Colleges in PuneDocument7 pagesEngineering Colleges in PuneAditi Parlikar0% (1)
- Citygml Extension For Bim / Ifc Information: Léon Van BerloDocument47 pagesCitygml Extension For Bim / Ifc Information: Léon Van BerloNicu RotaruPas encore d'évaluation
- Subject: Distribution Transformer (Manufacturer - HEMG)Document2 pagesSubject: Distribution Transformer (Manufacturer - HEMG)Wency JavatePas encore d'évaluation
- 2099 Datum CDocument2 pages2099 Datum CNistha ChakrabortyPas encore d'évaluation
- Spiral Model V - Model Big Bang Model: A Look at The Most Important and Popular SDLC ModelsDocument37 pagesSpiral Model V - Model Big Bang Model: A Look at The Most Important and Popular SDLC Modelsangelica campuedPas encore d'évaluation
- Modernizing Bangladesh Railway Signaling System: H. M. Ahsan, S. A. Rafat, S. HossainDocument2 pagesModernizing Bangladesh Railway Signaling System: H. M. Ahsan, S. A. Rafat, S. HossainxcgvxdfgPas encore d'évaluation
- Pengaruh Mobile Shopping Service Quality Terhadap Loyalitas Pelanggan Dimediasi Oleh Kepuasan Pelanggan Mobile Site Tokopedia Di Kota YogyakartaDocument12 pagesPengaruh Mobile Shopping Service Quality Terhadap Loyalitas Pelanggan Dimediasi Oleh Kepuasan Pelanggan Mobile Site Tokopedia Di Kota YogyakartaDanang WibisonoPas encore d'évaluation
- YANMAR 3TNV-4TNV Series Shop ManualDocument392 pagesYANMAR 3TNV-4TNV Series Shop ManualPHÁT NGUYỄN THẾ91% (22)
- S.O.L.I.D First Five Object-Oriented Design OODDocument2 pagesS.O.L.I.D First Five Object-Oriented Design OODnacPas encore d'évaluation
- Fire Safety Emergency Evacuation GuideDocument2 pagesFire Safety Emergency Evacuation GuideReyMartPas encore d'évaluation
- Watermaster Rev.wDocument52 pagesWatermaster Rev.wJack NgPas encore d'évaluation
- Single Line Diagram Adw C Blri Ka DWG 001 - SLD - r04Document1 pageSingle Line Diagram Adw C Blri Ka DWG 001 - SLD - r04Design and Estimation DepartmentPas encore d'évaluation
- Topic 10 - Topographic SurveyingDocument5 pagesTopic 10 - Topographic SurveyingJames Daryl TecsonPas encore d'évaluation
- As Built ScheduleDocument7 pagesAs Built ScheduleDayana Romero MonroyPas encore d'évaluation