Vous aimerez peut-être aussi
- Métodos numéricos para el modelado unidimensional del proceso de renovación de la cargaD'EverandMétodos numéricos para el modelado unidimensional del proceso de renovación de la cargaPas encore d'évaluation
- Análisis numérico en fenómenos de transporte. Casos de estudioD'EverandAnálisis numérico en fenómenos de transporte. Casos de estudioPas encore d'évaluation
- Sesión 2 - Modelo MatemáticoDocument27 pagesSesión 2 - Modelo MatemáticoErick JavesPas encore d'évaluation
- NUEVO INGRESO (Concentrado 23-03-2020)Document99 pagesNUEVO INGRESO (Concentrado 23-03-2020)Isaac Ramírez MoránPas encore d'évaluation
- Modelos Matemáticos de Sistemas FísicosDocument50 pagesModelos Matemáticos de Sistemas FísicosAndrés Alvarado NavaPas encore d'évaluation
- Tema 2 Modelado Matemático de Sistemas FísicosDocument24 pagesTema 2 Modelado Matemático de Sistemas FísicosMiguelPas encore d'évaluation
- Sistemas de Control de 1er 2do y Orden SuperiorDocument13 pagesSistemas de Control de 1er 2do y Orden SuperiorKaren AlvarezPas encore d'évaluation
- Cinematica de Una Particula 1Document70 pagesCinematica de Una Particula 1Marii Ramirez SosaPas encore d'évaluation
- Capitulo 4 Modelos Matematicos de Sistemas Fisicos (Comprimido)Document38 pagesCapitulo 4 Modelos Matematicos de Sistemas Fisicos (Comprimido)Juan ApazaPas encore d'évaluation
- Euler LagrangeDocument12 pagesEuler LagrangeDARIO DELGADO PORTILLOPas encore d'évaluation
- Vibraciones Libre en Sistemas de Un Grado de LibertadDocument21 pagesVibraciones Libre en Sistemas de Un Grado de LibertadJairoPas encore d'évaluation
- Matrices de Transformación HomogéneaDocument5 pagesMatrices de Transformación HomogéneaadolfoclesPas encore d'évaluation
- 1.2 Resultante de Fuerzas CoplanaresDocument13 pages1.2 Resultante de Fuerzas Coplanaresjavier verduzcoPas encore d'évaluation
- Proyecto SVM VSI PDFDocument7 pagesProyecto SVM VSI PDFArielPas encore d'évaluation
- Importancia Delta Dirac ADCDocument25 pagesImportancia Delta Dirac ADCMax100% (1)
- ED Mediante Series PDFDocument7 pagesED Mediante Series PDFarmengolblancoPas encore d'évaluation
- Velocidad CriticaDocument3 pagesVelocidad Criticaduvan pinillaPas encore d'évaluation
- Intrumentacion Aplicada MCT 202150Document153 pagesIntrumentacion Aplicada MCT 202150Anthony AguilaPas encore d'évaluation
- Presentacion de Cinematica de MaquinasDocument32 pagesPresentacion de Cinematica de MaquinasJoel FloresPas encore d'évaluation
- Fundamentos de Programación de Flujo de Datos en LabVIEW - National InstrumentsDocument3 pagesFundamentos de Programación de Flujo de Datos en LabVIEW - National InstrumentsPabloPas encore d'évaluation
- Análisis de Señales y SistemasDocument2 pagesAnálisis de Señales y SistemasAnonymous bqJDeCNI100% (1)
- AgoDic 2012 - Cap 1 IntroDocument25 pagesAgoDic 2012 - Cap 1 IntroAdrian MorenoPas encore d'évaluation
- Tesis Pendulo InvertidoDocument163 pagesTesis Pendulo InvertidoJor Ge0% (1)
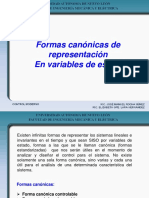
- 03-Formas Canonicas de RVEDocument58 pages03-Formas Canonicas de RVEctagmPas encore d'évaluation
- Diseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarDocument12 pagesDiseño y Análisis de Controladores para Un Robot de 3GDL Con Capacidad de Dibujo - Rimachi Albites PaucarMichael Rimachi100% (2)
- Reactor CSTRDocument27 pagesReactor CSTRDavid Alejandro Gómez Mejía100% (2)
- Diseño de Un Robot 4gdlDocument14 pagesDiseño de Un Robot 4gdlAntonio Jara ChavezPas encore d'évaluation
- Realimentación Del EstadoDocument3 pagesRealimentación Del EstadoWalter CMPas encore d'évaluation
- Lista de Comandos de MatlabDocument3 pagesLista de Comandos de MatlabDaniel Arenas100% (1)
- FEM Inducida en Campos EléctricosDocument7 pagesFEM Inducida en Campos Eléctricospancho8gtz0% (1)
- Matlab Guia de Trabajos Practicos UNSEDocument40 pagesMatlab Guia de Trabajos Practicos UNSESebastian TrejoPas encore d'évaluation
- Algoritmo Matlab de Un Sistema de PendulosDocument14 pagesAlgoritmo Matlab de Un Sistema de PendulosFIDEL TOMAS MONTEZA ZEVALLOS100% (4)
- Seleccion de RobotsDocument10 pagesSeleccion de RobotsJonnathan Raúl DíazPas encore d'évaluation
- Actividad 1. - Actuadores Hidraulicos y NeumaticosDocument23 pagesActividad 1. - Actuadores Hidraulicos y NeumaticosAdan Espinoza100% (1)
- Practica - Funciones de TransferenciaDocument19 pagesPractica - Funciones de TransferenciaRafael Aguilar RiosPas encore d'évaluation
- Mecanismos U1 Parte 1 1Document52 pagesMecanismos U1 Parte 1 1Fernando HernandezPas encore d'évaluation
- Diseño de Un Controlador Neuronal para Un RobotDocument22 pagesDiseño de Un Controlador Neuronal para Un Robotpilipili25Pas encore d'évaluation
- Grafcet en El Sistema de AutomatizacionDocument6 pagesGrafcet en El Sistema de AutomatizacioncegoglzPas encore d'évaluation
- Funcion de TransferenciaDocument24 pagesFuncion de TransferenciaSergio Zuniga QuispePas encore d'évaluation
- TFG Bustamante Téllez Jonatan 2016Document146 pagesTFG Bustamante Téllez Jonatan 2016Gregorio HernandezPas encore d'évaluation
- Tema07.Registros y ContadoresDocument54 pagesTema07.Registros y ContadoresAngel Gabriel Retamozo MolinaPas encore d'évaluation
- Automatizacion FlexibleDocument4 pagesAutomatizacion FlexibleHarumi Rubio100% (2)
- Error en Estado EstacionarioDocument18 pagesError en Estado EstacionarioDaniela CruzPas encore d'évaluation
- 4.4 Localización de Polos y Ceros, Polos DominantesDocument17 pages4.4 Localización de Polos y Ceros, Polos DominantesRaul ZambranoPas encore d'évaluation
- Optimización TopológicaDocument29 pagesOptimización TopológicamartinPas encore d'évaluation
- Análisis Temporal de Sistemas ContinuosDocument56 pagesAnálisis Temporal de Sistemas ContinuosJuan GallardoPas encore d'évaluation
- Control de Sistemas Mecánicos Subactuados PDFDocument8 pagesControl de Sistemas Mecánicos Subactuados PDFIng Emisael AlarcónPas encore d'évaluation
- Definiciones BasicasDocument15 pagesDefiniciones BasicasMarco AdamePas encore d'évaluation
- Ejemplos de BondGraphDocument69 pagesEjemplos de BondGraphDavid BandaPas encore d'évaluation
- La Transformada ZDocument51 pagesLa Transformada ZRicardo14100% (1)
- Filtros de KalmanDocument9 pagesFiltros de KalmanFrancisco SerranoPas encore d'évaluation
- Pasividad en Sistemas de Control Rev 2Document32 pagesPasividad en Sistemas de Control Rev 2Raul Roque Yujra100% (2)
- Modelo de Crecimiento PoblacionalDocument7 pagesModelo de Crecimiento PoblacionalYunni AlixonPas encore d'évaluation
- Introduccion LabVIEWDocument13 pagesIntroduccion LabVIEWISRAEL AMADORPas encore d'évaluation
- Problemas Resuelto de Corriente Continua1 1233239398089066 2Document25 pagesProblemas Resuelto de Corriente Continua1 1233239398089066 2Jeisson GutierrezPas encore d'évaluation
- Velocidad MecanismosDocument17 pagesVelocidad MecanismosjuliocesaribarraPas encore d'évaluation
- InstallDocument8 pagesInstallJavier Juarez AlcantaraPas encore d'évaluation
- Aplicaciones de La Transformada de LaplaceDocument5 pagesAplicaciones de La Transformada de Laplacejoe_ctb10Pas encore d'évaluation
- Generación y Abastecimiento de Energía de Sistemas HidráulicosDocument7 pagesGeneración y Abastecimiento de Energía de Sistemas HidráulicosYesi Salazar LimasPas encore d'évaluation
- Sistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosD'EverandSistemas memristivos: representación físico-matemática desde la teoría de sistemas dinámicosPas encore d'évaluation
- Lab14 - PLC2 (Control On Off)Document9 pagesLab14 - PLC2 (Control On Off)Luis Alberto Perez CaroPas encore d'évaluation
- Control Nivel Control PLCDocument9 pagesControl Nivel Control PLCSebastian CavieresPas encore d'évaluation
- Auditoria de MantenimientoDocument26 pagesAuditoria de MantenimientoVictor Gary Cabezas PianchichePas encore d'évaluation
- Examen Parcial - Ing. de ControlDocument6 pagesExamen Parcial - Ing. de ControlFaby Itucayasi RamosPas encore d'évaluation
- Tarea1 Control SámanoDocument8 pagesTarea1 Control SámanoAna Paola SámanoPas encore d'évaluation
- ING Control Act 1Document6 pagesING Control Act 1helen diazPas encore d'évaluation
- Definir Los Siguientes TérminosDocument4 pagesDefinir Los Siguientes TérminosJohan Poul Trejo ChumbimunePas encore d'évaluation
- Sistemas de Control - Lazo Abierto - LazoDocument4 pagesSistemas de Control - Lazo Abierto - LazoChristian AlexisPas encore d'évaluation
- Control Automatico en La Industria AzucareraDocument49 pagesControl Automatico en La Industria AzucareraYaxel71% (7)
- Unidad 1 Comunicaciones y Redes IndustrialesDocument42 pagesUnidad 1 Comunicaciones y Redes IndustrialesChelito De Jesus Villalobos Gtz100% (1)
- Parámetros de Instrumentos de Medición en Procesos IndustrialesDocument8 pagesParámetros de Instrumentos de Medición en Procesos IndustrialesLuis DomínguezPas encore d'évaluation
- Informe 4Document6 pagesInforme 4Juan David Jaiquel VillamilPas encore d'évaluation
- Control AnticipativoDocument25 pagesControl Anticipativomira_brenPas encore d'évaluation
- Manual Trabajo Sensores Festo PDFDocument26 pagesManual Trabajo Sensores Festo PDFDaniel RamirezPas encore d'évaluation
- Trabajo Mini Central Electrica 1200 KWDocument16 pagesTrabajo Mini Central Electrica 1200 KWCAPPas encore d'évaluation
- Binp U3 A1 SacjDocument6 pagesBinp U3 A1 SacjTuro ValadezPas encore d'évaluation
- Estabilidad de Sistemas LinealesDocument12 pagesEstabilidad de Sistemas LinealesTrabajos AcademicosPas encore d'évaluation
- 01 PSGCC Operación de Vehículos Livianos (Supervisor - A)Document23 pages01 PSGCC Operación de Vehículos Livianos (Supervisor - A)Pedro Viru BernaolaPas encore d'évaluation
- Tarea1 Control Historia Del ControlDocument6 pagesTarea1 Control Historia Del ControlDaniel NietoPas encore d'évaluation
- Jose Romero Tarea5Document4 pagesJose Romero Tarea5Jose Luis100% (1)
- Criterio de Estabilidad de Routh-HurwitzDocument19 pagesCriterio de Estabilidad de Routh-HurwitzEdwin Sanchez M0% (1)
- Los Aspectos Mas Importantes de La NeumaticaDocument8 pagesLos Aspectos Mas Importantes de La NeumaticaAshley NavarroPas encore d'évaluation
- Cuestionario Instrumentación IndustrialDocument2 pagesCuestionario Instrumentación Industrialjulian_a_a100% (2)
- Abt-Ccp146-Tsmes 2007-05Document206 pagesAbt-Ccp146-Tsmes 2007-05calixtopacosilloatoPas encore d'évaluation
- Diagrama de Instrumentacion y Tuberias NDocument30 pagesDiagrama de Instrumentacion y Tuberias NAlberto YubailePas encore d'évaluation
- 1 Actividades Tema 1 - Control y RobóticaDocument7 pages1 Actividades Tema 1 - Control y Robóticaandris javier herrera cueto100% (1)
- Códigos de Avería Kia (Motores Gasolina)Document10 pagesCódigos de Avería Kia (Motores Gasolina)JOn saldañaPas encore d'évaluation
- 626648.control Automatico - Primera ParteDocument61 pages626648.control Automatico - Primera Parteesteeven86Pas encore d'évaluation
- A3 - AfrDocument3 pagesA3 - AfrAlberto FrancoPas encore d'évaluation
- Control Autom Tico 2 Esquemas Modelamiento Linearizaci N IDocument23 pagesControl Autom Tico 2 Esquemas Modelamiento Linearizaci N IJoel PPPPas encore d'évaluation