Vous aimerez peut-être aussi
- Ac40lp SRDocument2 pagesAc40lp SRandre_jvcPas encore d'évaluation
- CorelDRAW Graphics Suite X6Document1 pageCorelDRAW Graphics Suite X6andre_jvcPas encore d'évaluation
- AeroShell 100Document8 pagesAeroShell 100andre_jvcPas encore d'évaluation
- Drag Coefficient of Sphere - FinalDocument9 pagesDrag Coefficient of Sphere - FinalPeter BournelisPas encore d'évaluation
- FEA Problems 2017 4460Document4 pagesFEA Problems 2017 4460andre_jvcPas encore d'évaluation
- Manual Storch HS R 912 UL - DesbloqueadoDocument52 pagesManual Storch HS R 912 UL - Desbloqueadoandre_jvcPas encore d'évaluation
- Sds Lubribor Ghs Eu Rev 8 15Document13 pagesSds Lubribor Ghs Eu Rev 8 15andre_jvcPas encore d'évaluation
- FloWorks TutorialDocument244 pagesFloWorks TutorialRandolf RodriguezPas encore d'évaluation
- Jack Weigh RFX Kit: Accurate, Mobile & Easy To Use Top of Jack Weighing SystemsDocument2 pagesJack Weigh RFX Kit: Accurate, Mobile & Easy To Use Top of Jack Weighing Systemsandre_jvcPas encore d'évaluation
- 91 91 Issue 7 AMD 3 2Document38 pages91 91 Issue 7 AMD 3 2andre_jvcPas encore d'évaluation
- GAModel 3 FDocument32 pagesGAModel 3 Fandre_jvcPas encore d'évaluation
- CSWA Sample ExamDocument33 pagesCSWA Sample ExamMarko Leš100% (1)
- FEAC FinalDocument313 pagesFEAC FinalmgilbelPas encore d'évaluation
- 0 Tybcdybo 5Document1 page0 Tybcdybo 5andre_jvcPas encore d'évaluation
- Faa Ac 121-22CDocument81 pagesFaa Ac 121-22CSmrti SattanaPas encore d'évaluation
- Maintenance Steering GroupDocument7 pagesMaintenance Steering GroupmadhwarajPas encore d'évaluation
- Scheduled Maintenance Seminar Part1 May2013Document40 pagesScheduled Maintenance Seminar Part1 May2013raksngh100% (1)
- CSWA Sample ExamDocument33 pagesCSWA Sample ExamMarko Leš100% (1)
- Storch Flight Manual - Eng Version 28 - 04 - 05 PDFDocument51 pagesStorch Flight Manual - Eng Version 28 - 04 - 05 PDFandre_jvcPas encore d'évaluation
- Section 8b Peussdistributions 2 Slides Compatibility ModeDocument38 pagesSection 8b Peussdistributions 2 Slides Compatibility Modeandre_jvcPas encore d'évaluation
- Simulink Basics Tutorial Starting SimulinkDocument58 pagesSimulink Basics Tutorial Starting SimulinkossomansPas encore d'évaluation
- Sets DDocument32 pagesSets Dandre_jvcPas encore d'évaluation
- Naca Report 823Document21 pagesNaca Report 823andre_jvcPas encore d'évaluation
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Saas-Fee Advanced Course 36Document381 pagesSaas-Fee Advanced Course 36Maria TeresaPas encore d'évaluation
- The Wireless Channel 1Document43 pagesThe Wireless Channel 1Anil FkPas encore d'évaluation
- Mitchell 2014Document13 pagesMitchell 2014Kingshuk MukherjeePas encore d'évaluation
- Impeller Vortex ApparatusDocument2 pagesImpeller Vortex ApparatusGenesis GendranoPas encore d'évaluation
- Inclined Planes and Forces Notes PDFDocument19 pagesInclined Planes and Forces Notes PDFJovy0% (1)
- ABB Electronic Products and Relays CM-Three-phase en 1111Document24 pagesABB Electronic Products and Relays CM-Three-phase en 1111babaPas encore d'évaluation
- 8 Head Loss Aliran Pipa PDFDocument33 pages8 Head Loss Aliran Pipa PDFasep mibarockPas encore d'évaluation
- Gas Dynamics and Jet PropulsionDocument317 pagesGas Dynamics and Jet PropulsionVinoth RajaguruPas encore d'évaluation
- ME2134 Review SlidesDocument60 pagesME2134 Review SlidesowenwongsohyikPas encore d'évaluation
- B. Eng (Hons) Chemical Engineering: Course OutlineDocument9 pagesB. Eng (Hons) Chemical Engineering: Course OutlinemarkPas encore d'évaluation
- Fluid Mechanics (Experiment)Document29 pagesFluid Mechanics (Experiment)simple-CE-studPas encore d'évaluation
- UNIT 8 ThermodynamicsDocument9 pagesUNIT 8 ThermodynamicsHimadhar SaduPas encore d'évaluation
- Interpreting Motion Using Charts & Graphs (Module) PDFDocument10 pagesInterpreting Motion Using Charts & Graphs (Module) PDFPretty SwanPas encore d'évaluation
- Lame ConstantsDocument2 pagesLame ConstantsAldi NurseptaPas encore d'évaluation
- Effects of Dry Density and Grain Size Distribution On Soil-Water Characteristic Curves of Sandy SoilsDocument12 pagesEffects of Dry Density and Grain Size Distribution On Soil-Water Characteristic Curves of Sandy SoilsmazharPas encore d'évaluation
- Dynamic Stability Analysis of A Tethered AerostatDocument8 pagesDynamic Stability Analysis of A Tethered AerostatNick SetarPas encore d'évaluation
- P-Y Curves Methods - Laterally Loaded PilesDocument3 pagesP-Y Curves Methods - Laterally Loaded PilesRamanathan GnanasambandamPas encore d'évaluation
- Phy213 CH29 Worksheet-KeyDocument5 pagesPhy213 CH29 Worksheet-KeynjparPas encore d'évaluation
- Nonlinear OpticsDocument236 pagesNonlinear OpticsbananabandbabybirdPas encore d'évaluation
- Separator Sizing SpreadsheetDocument40 pagesSeparator Sizing SpreadsheetWalid Ben Husein100% (2)
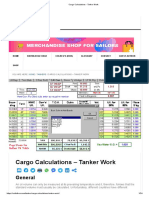
- Cargo Calculations - Tanker WorkDocument24 pagesCargo Calculations - Tanker WorkVasil Raykov100% (1)
- Cambridge International AS & A Level: PHYSICS 9702/42Document24 pagesCambridge International AS & A Level: PHYSICS 9702/42Gulnur KenzheevaPas encore d'évaluation
- Carnot Vs Rankine CycleDocument2 pagesCarnot Vs Rankine CycleRizwan Ullah BaigPas encore d'évaluation
- Make An Atomic Theory Timeline! PDFDocument4 pagesMake An Atomic Theory Timeline! PDFNathan KenmogniePas encore d'évaluation
- Short Notes For Soil MechanicsDocument26 pagesShort Notes For Soil MechanicsColdWinterKid50% (2)
- Radioactivity - PDFDocument8 pagesRadioactivity - PDFWhite Heart100% (2)
- WWW - Physics.ox - Ac.uk - Olympiad - Downloads - PastPapers - BPhO - Round - 1 - PRT - 1 - 2014 PDFDocument7 pagesWWW - Physics.ox - Ac.uk - Olympiad - Downloads - PastPapers - BPhO - Round - 1 - PRT - 1 - 2014 PDFMadAm JaJaPas encore d'évaluation
- What Is Matrix EnergeticsDocument3 pagesWhat Is Matrix EnergeticsJill Paxton100% (1)
- Digital Power Clamp Meter HIOKI 3286Document4 pagesDigital Power Clamp Meter HIOKI 3286industrialindiaPas encore d'évaluation