Vous aimerez peut-être aussi
- System ProgrammingDocument21 pagesSystem ProgrammingSaraswati Bhusanur100% (1)
- CS1203 System Software UNIT I Question AnsDocument10 pagesCS1203 System Software UNIT I Question AnskeerthisivaPas encore d'évaluation
- 6 CosynthesisDocument50 pages6 CosynthesisRaghu RamPas encore d'évaluation
- System ProgrammingDocument21 pagesSystem Programmingatulsahu24Pas encore d'évaluation
- KCG College of Technology, Chennai-96 Computer Science and EngineeringDocument9 pagesKCG College of Technology, Chennai-96 Computer Science and EngineeringTeja ReddyPas encore d'évaluation
- CS2304 System Software UNIT I NOTES PDFDocument9 pagesCS2304 System Software UNIT I NOTES PDFPavankumar PkPas encore d'évaluation
- Concurrent Programming With Threads: Rajkumar BuyyaDocument168 pagesConcurrent Programming With Threads: Rajkumar BuyyaSurangma ParasharPas encore d'évaluation
- System Software: An Introduction To Systems Programming Leland L. Beck 3rd Edition Addison-Wesley, 1997Document40 pagesSystem Software: An Introduction To Systems Programming Leland L. Beck 3rd Edition Addison-Wesley, 1997Shoyab Ahamed50% (4)
- System Software FundamentalsDocument77 pagesSystem Software FundamentalsJASPER WESSLYPas encore d'évaluation
- System Software ToolsDocument9 pagesSystem Software ToolsClashing with DeepakPas encore d'évaluation
- ParkingDocument18 pagesParkingSÁMÃÑ KANNAPas encore d'évaluation
- Nited Nstitute of EchnologyDocument11 pagesNited Nstitute of Echnologykeerthi3214Pas encore d'évaluation
- 08.546 DSD With VHDL Lecture Notes - Module 1Document70 pages08.546 DSD With VHDL Lecture Notes - Module 1Assini Hussain100% (1)
- Signal Processing and CommunicationsDocument38 pagesSignal Processing and CommunicationsoveiskntuPas encore d'évaluation
- Computer Systems Programming: Dr. Eyas El-QawasmehDocument49 pagesComputer Systems Programming: Dr. Eyas El-QawasmehLavanya AshokPas encore d'évaluation
- 8834.system Software 1Document77 pages8834.system Software 1Sheenu BaidwanPas encore d'évaluation
- Fundamentals of Processor Design: Using Figures From by Hamblen and FurmanDocument35 pagesFundamentals of Processor Design: Using Figures From by Hamblen and Furmanwilliamjamir2295Pas encore d'évaluation
- Simplifying Active Memory Clusters by Leveraging Directory Protocol ThreadsDocument12 pagesSimplifying Active Memory Clusters by Leveraging Directory Protocol ThreadsSreeram KumarPas encore d'évaluation
- Input Unit: Five Basic Components of Computer SystemDocument9 pagesInput Unit: Five Basic Components of Computer SystemJefin PaulPas encore d'évaluation
- System Software UNIT IDocument9 pagesSystem Software UNIT Ipalanichelvam100% (4)
- System Software Notes 5TH Sem VtuDocument15 pagesSystem Software Notes 5TH Sem VtuNeha Chinni100% (5)
- SS Chapter 01 Introduction To A Machine ArchitectureDocument56 pagesSS Chapter 01 Introduction To A Machine ArchitecturehayatPas encore d'évaluation
- DSP Adoptive FilterDocument9 pagesDSP Adoptive FilterIsmail MalikPas encore d'évaluation
- CS 6103 SYSTEM PROGRAMMING: Course Objectives, Syllabus, BooksDocument39 pagesCS 6103 SYSTEM PROGRAMMING: Course Objectives, Syllabus, BooksShyam JalanPas encore d'évaluation
- CSC 5sem CS2304NOLDocument60 pagesCSC 5sem CS2304NOLVinay Kshatriya HalPas encore d'évaluation
- Chapter1 PDFDocument30 pagesChapter1 PDFzparuPas encore d'évaluation
- cs2304 NolDocument49 pagescs2304 NolAlex DavidPas encore d'évaluation
- HCS 04 RegistersDocument60 pagesHCS 04 RegistersAnonymous WwI2swbQWPas encore d'évaluation
- Simulation Software: Discrete-Event System Simulation 5 EditionDocument47 pagesSimulation Software: Discrete-Event System Simulation 5 EditionMandeepPas encore d'évaluation
- System Software Internals Course OverviewDocument88 pagesSystem Software Internals Course OverviewSagar ChingaliPas encore d'évaluation
- Araujo 2005 F DLDocument12 pagesAraujo 2005 F DLLucas CambuimPas encore d'évaluation
- Multi ThreadingDocument168 pagesMulti ThreadingPrashanth RajendranPas encore d'évaluation
- Design Flow OverviewDocument9 pagesDesign Flow OverviewJubin JainPas encore d'évaluation
- St.Joseph's College Engineering Dept. CS2304 System SoftwareDocument49 pagesSt.Joseph's College Engineering Dept. CS2304 System Softwaresumathi7975% (16)
- Delayed Branch Logic: Texas Instruments TMS320 Is A Blanket Name For A Series ofDocument13 pagesDelayed Branch Logic: Texas Instruments TMS320 Is A Blanket Name For A Series ofnomadcindrellaPas encore d'évaluation
- White Paper Designing High-Performance DSP Hardware Using Catapult C Synthesis and The Altera Accelerated LibrariesDocument9 pagesWhite Paper Designing High-Performance DSP Hardware Using Catapult C Synthesis and The Altera Accelerated Librarieszahid52Pas encore d'évaluation
- Systemc For Embedded System Design: Seminar Embedded Systems (Ws 06/07)Document11 pagesSystemc For Embedded System Design: Seminar Embedded Systems (Ws 06/07)Gagan ChopraPas encore d'évaluation
- Instruction Set Architecture FundamentalsDocument50 pagesInstruction Set Architecture FundamentalslogintojalluriPas encore d'évaluation
- CISCDocument16 pagesCISCAnonymous OQxVUBZVPas encore d'évaluation
- FIR FilterDocument5 pagesFIR FilterManasa UpadhyayaPas encore d'évaluation
- CS6103-SP-Module 1Document39 pagesCS6103-SP-Module 1Zane JhonsonPas encore d'évaluation
- System Programming Background and SIC ArchitectureDocument57 pagesSystem Programming Background and SIC ArchitectureNhongTranPas encore d'évaluation
- System ProgrammingDocument42 pagesSystem ProgrammingNhongTranPas encore d'évaluation
- C6713 DSP Lab Mannual 2Document40 pagesC6713 DSP Lab Mannual 2dangvuduongPas encore d'évaluation
- System Software vs Machine ArchitectureDocument41 pagesSystem Software vs Machine ArchitectureDivya SinghPas encore d'évaluation
- Microprocessor ApplicationsDocument100 pagesMicroprocessor Applicationsjai prakashPas encore d'évaluation
- Cs54 System SoftwareDocument131 pagesCs54 System Softwarego4nagarajuPas encore d'évaluation
- SoC Design and Modelling Lecture NotesDocument131 pagesSoC Design and Modelling Lecture NotesSambhav VermanPas encore d'évaluation
- Module 01-MicrocontrollerDocument15 pagesModule 01-MicrocontrollerRejwan TanzinPas encore d'évaluation
- SsDocument60 pagesSsponns100% (1)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationD'EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationPas encore d'évaluation
- Embedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesD'EverandEmbedded Software Design and Programming of Multiprocessor System-on-Chip: Simulink and System C Case StudiesPas encore d'évaluation
- Architecture-Aware Optimization Strategies in Real-time Image ProcessingD'EverandArchitecture-Aware Optimization Strategies in Real-time Image ProcessingPas encore d'évaluation
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreD'EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MorePas encore d'évaluation
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.D'EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Pas encore d'évaluation
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960D'EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Pas encore d'évaluation
- Digital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingD'EverandDigital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingÉvaluation : 5 sur 5 étoiles5/5 (1)
- Raghu SeuDocument1 pageRaghu SeuRaghu RamPas encore d'évaluation
- Marks Duty Sessional I D Sec Not EnteredDocument3 pagesMarks Duty Sessional I D Sec Not EnteredRaghu RamPas encore d'évaluation
- RRDocument1 pageRRRaghu RamPas encore d'évaluation
- 6TDocument1 page6TRaghu RamPas encore d'évaluation
- 8085 qb2Document4 pages8085 qb2Raghu RamPas encore d'évaluation
- RaghuTO PatnaDocument1 pageRaghuTO PatnaRaghu RamPas encore d'évaluation
- PTM BsimDocument4 pagesPTM BsimRaghu RamPas encore d'évaluation
- NaMo Calender 2017-1 PDFDocument12 pagesNaMo Calender 2017-1 PDFRaghu RamPas encore d'évaluation
- Mev Cm2/Mg (I.E., Mev/Cm Divided by Mg/Cm2)Document2 pagesMev Cm2/Mg (I.E., Mev/Cm Divided by Mg/Cm2)Raghu RamPas encore d'évaluation
- Biharpoliovaccinationcentersfor Internationaltravelerstravellingto PolioendemiccountryDocument1 pageBiharpoliovaccinationcentersfor Internationaltravelerstravellingto PolioendemiccountryRaghu RamPas encore d'évaluation
- Basic ElectronicsDocument2 pagesBasic ElectronicsVishwajith SinghPas encore d'évaluation
- 8085 qb1Document2 pages8085 qb1Raghu RamPas encore d'évaluation
- PTM 65nm NMOS and PMOS modelsDocument5 pagesPTM 65nm NMOS and PMOS modelsDamodar TeluPas encore d'évaluation
- CMOS Technology and Logic Gates: Only 15,432,758 More Mosfets To Do..Document37 pagesCMOS Technology and Logic Gates: Only 15,432,758 More Mosfets To Do..Raghu RamPas encore d'évaluation
- 3 1Document22 pages3 1Raghu RamPas encore d'évaluation
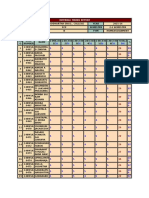
- Internal Marks Report ECE DeptDocument4 pagesInternal Marks Report ECE DeptRaghu RamPas encore d'évaluation
- Arm Mcu EngineerDocument1 pageArm Mcu EngineerRaghu RamPas encore d'évaluation
- Objective 8085Document18 pagesObjective 8085Raghu RamPas encore d'évaluation
- ResearchDocument8 pagesResearchRaghu RamPas encore d'évaluation
- ECE Dept EC5001 Results AnalysisDocument10 pagesECE Dept EC5001 Results AnalysisRaghu RamPas encore d'évaluation
- 8085 qb3Document2 pages8085 qb3Raghu RamPas encore d'évaluation
- Ansoft Wininstall 082009Document60 pagesAnsoft Wininstall 082009ngvanhaoPas encore d'évaluation
- TitlesDocument1 pageTitlesRaghu RamPas encore d'évaluation
- MQP 4Document12 pagesMQP 4weteamPas encore d'évaluation
- Ccuracy and Speed: HapterDocument14 pagesCcuracy and Speed: HapterCarl ScottPas encore d'évaluation
- Ccuracy and Speed: HapterDocument14 pagesCcuracy and Speed: HapterCarl ScottPas encore d'évaluation
- M.tech VlsiDocument71 pagesM.tech VlsiRaghu RamPas encore d'évaluation
- Presenting A Conference PaperDocument3 pagesPresenting A Conference PaperNJPas encore d'évaluation
- Article and Carton Code Tracking SheetDocument12 pagesArticle and Carton Code Tracking SheetchandraPas encore d'évaluation
- Back Up Azure Virtual Machines To A Recovery Services Vault PDFDocument712 pagesBack Up Azure Virtual Machines To A Recovery Services Vault PDFcocibolca61Pas encore d'évaluation
- Responsive Document - CREW: Department of The Army: Regarding Record Management and Cloud Computing (6/24/2011 FOIA Requests) : 4/4/2012 - Redacted USACE Pages - BinderDocument125 pagesResponsive Document - CREW: Department of The Army: Regarding Record Management and Cloud Computing (6/24/2011 FOIA Requests) : 4/4/2012 - Redacted USACE Pages - BinderCREWPas encore d'évaluation
- Star Memory SystemDocument10 pagesStar Memory SystemRochelle LewisPas encore d'évaluation
- TS Engineering Options 2019Document1 pageTS Engineering Options 2019bkanaparthyPas encore d'évaluation
- DeviceNet PDFDocument43 pagesDeviceNet PDFCristhianMauricioQuezadaPas encore d'évaluation
- ProfibusResistance TestDocument6 pagesProfibusResistance Testplazmorezka74Pas encore d'évaluation
- Kenwood KDC Instruction ManualDocument36 pagesKenwood KDC Instruction ManualcandongueiroPas encore d'évaluation
- MX Multisinsor Suction Smoke Detector Hilios TDS PDFDocument2 pagesMX Multisinsor Suction Smoke Detector Hilios TDS PDFNarendra Reddy BhumaPas encore d'évaluation
- XSLF CookbookDocument6 pagesXSLF CookbookjimakosjpPas encore d'évaluation
- Timer Manual N21JUDocument4 pagesTimer Manual N21JUusm01Pas encore d'évaluation
- GLFW Users GuideDocument45 pagesGLFW Users Guideacer012006Pas encore d'évaluation
- Windows 7 System Requirements or SpecificationDocument27 pagesWindows 7 System Requirements or SpecificationAllan F. RolomaPas encore d'évaluation
- Manual de Instrucciones de Palm TXDocument2 pagesManual de Instrucciones de Palm TXManete71Pas encore d'évaluation
- 26 HHW Katalog 2010 Eng UniversaleDocument10 pages26 HHW Katalog 2010 Eng Universalecos2012Pas encore d'évaluation
- Oracle E-Business Suite Developer's Guide - E22961Document730 pagesOracle E-Business Suite Developer's Guide - E22961prakash_srikanthPas encore d'évaluation
- Arfa KarimDocument3 pagesArfa KarimSyed HussainiPas encore d'évaluation
- Kiem Tra KTMT HN hk1 2019 2020Document16 pagesKiem Tra KTMT HN hk1 2019 2020Tùng LêPas encore d'évaluation
- Maxtor M3 Portable - User Manual-EN - E01 - 19 05 2016 PDFDocument22 pagesMaxtor M3 Portable - User Manual-EN - E01 - 19 05 2016 PDFAhmad ElsheemyPas encore d'évaluation
- TS80 Soldering Iron User Manual V1.1Document23 pagesTS80 Soldering Iron User Manual V1.1nigger naggerPas encore d'évaluation
- Regarding The Change of Names Mentioned in The Document, Such As Mitsubishi Electric and Mitsubishi XX, To Renesas Technology CorpDocument37 pagesRegarding The Change of Names Mentioned in The Document, Such As Mitsubishi Electric and Mitsubishi XX, To Renesas Technology CorpАнтон ПPas encore d'évaluation
- Boom DD321Document98 pagesBoom DD321Rene Ramos MenesesPas encore d'évaluation
- DehDocument34 pagesDehAnand Swami100% (1)
- CRT vs LCD - Key Differences Between CRT Monitor and LCD MonitorDocument19 pagesCRT vs LCD - Key Differences Between CRT Monitor and LCD MonitorAdhie D'combeatPas encore d'évaluation
- 001 Bizgram Asia Pricelist December 23HDocument15 pages001 Bizgram Asia Pricelist December 23HBizgram AsiaPas encore d'évaluation
- Labview ManualDocument10 pagesLabview ManualAdil AkhtarPas encore d'évaluation
- Cisco How To Download A Software Image To Cisco 2600-2800-3800 Series Router Through TFTP Using The TFTPDNLD ROMmon Command - Document ID 12714Document4 pagesCisco How To Download A Software Image To Cisco 2600-2800-3800 Series Router Through TFTP Using The TFTPDNLD ROMmon Command - Document ID 12714Juicy69MannPas encore d'évaluation
- CARPOOLINGDocument61 pagesCARPOOLINGKavya PradeepPas encore d'évaluation
- RCLSTGDocument7 pagesRCLSTGS_BHAVSAR1Pas encore d'évaluation
- Supresor ElectricoDocument12 pagesSupresor ElectricoJuan QuezadaPas encore d'évaluation