Vous aimerez peut-être aussi
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (119)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Myths of Greece and Rome PDFDocument247 pagesMyths of Greece and Rome PDFratheesh1981Pas encore d'évaluation
- 18 Butterfly Valves A Disc BrayDocument10 pages18 Butterfly Valves A Disc BrayAli FananiPas encore d'évaluation
- Finals-Insurance Week 5Document19 pagesFinals-Insurance Week 5Ryan ChristianPas encore d'évaluation
- Mycbseguide: Cbse Class 10 Social Science Sample Paper - 08 (MCQ Based)Document10 pagesMycbseguide: Cbse Class 10 Social Science Sample Paper - 08 (MCQ Based)Abdul MuqsitPas encore d'évaluation
- IIT2019 RIT-1-CPM Chemistry TestDocument15 pagesIIT2019 RIT-1-CPM Chemistry TestPRAKHAR GUPTAPas encore d'évaluation
- Belden CatalogDocument24 pagesBelden CatalogMani MaranPas encore d'évaluation
- Measuring and calculating dimensions for pipes, plates, cylinders and moreDocument100 pagesMeasuring and calculating dimensions for pipes, plates, cylinders and moreGarcia MaybellePas encore d'évaluation
- Appendix C: Time Value of MoneyDocument15 pagesAppendix C: Time Value of MoneyrockerPas encore d'évaluation
- Dimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutDocument11 pagesDimensional Analysis Similarity Lesson2 Dimensional Parameters HandoutRizqi RamadhanPas encore d'évaluation
- 2290 PDFDocument222 pages2290 PDFmittupatel190785Pas encore d'évaluation
- Flame Configurations in A Lean Premixed Dump Combustor With An Annular Swirling FlowDocument8 pagesFlame Configurations in A Lean Premixed Dump Combustor With An Annular Swirling Flowعبدالله عبدالعاطيPas encore d'évaluation
- 4 Ideal Models of Engine CyclesDocument23 pages4 Ideal Models of Engine CyclesSyedPas encore d'évaluation
- BS en 12201 5 2011Document20 pagesBS en 12201 5 2011fatjon31100% (4)
- Very Low Altitude Drag-Free Satellites: R D UpdatesDocument5 pagesVery Low Altitude Drag-Free Satellites: R D Updatesraa2010Pas encore d'évaluation
- Common Herbs and Foods Used As Galactogogues PDFDocument4 pagesCommon Herbs and Foods Used As Galactogogues PDFHadi El-MaskuryPas encore d'évaluation
- Manual Del GVMapper v3 3 PDFDocument102 pagesManual Del GVMapper v3 3 PDFguanatosPas encore d'évaluation
- Business PlanDocument63 pagesBusiness PlanKristine BalanayPas encore d'évaluation
- Basic Principles of Local GovernmentDocument72 pagesBasic Principles of Local GovernmentAnne Camille SongPas encore d'évaluation
- JSW Energy Plant Maintenance BBPDocument46 pagesJSW Energy Plant Maintenance BBPSandeep Kumar PraharajPas encore d'évaluation
- Advanced Radiographic Techniques PDFDocument21 pagesAdvanced Radiographic Techniques PDFelokfaiqPas encore d'évaluation
- Semen RetentionDocument3 pagesSemen RetentionMattPas encore d'évaluation
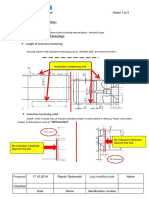
- Induction Hardening - Interpretation of Drawing & Testing PDFDocument4 pagesInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHPas encore d'évaluation
- LOD Spec 2016 Part I 2016-10-19 PDFDocument207 pagesLOD Spec 2016 Part I 2016-10-19 PDFzakariazulkifli92Pas encore d'évaluation
- 4608 Eed 01Document29 pages4608 Eed 01NickPas encore d'évaluation
- The Relevance of Vivekananda S Thought IDocument16 pagesThe Relevance of Vivekananda S Thought IJaiyansh VatsPas encore d'évaluation
- 1 John 2:15-27 - Bible Commentary For PreachingDocument6 pages1 John 2:15-27 - Bible Commentary For PreachingJacob D. GerberPas encore d'évaluation
- Strategic Management Plan analyzing Unilever's macro and micro environmentsDocument17 pagesStrategic Management Plan analyzing Unilever's macro and micro environmentsMd Moshiul HaquePas encore d'évaluation
- Ninoy Aquino Parks and Wildlife CenterDocument7 pagesNinoy Aquino Parks and Wildlife CenterNinia Richelle Angela AgaPas encore d'évaluation
- Lect 17 Amp Freq RespDocument22 pagesLect 17 Amp Freq RespBent777Pas encore d'évaluation
- Mahle KFWA MAIN Data SheetDocument4 pagesMahle KFWA MAIN Data SheetRudnikPas encore d'évaluation