Vous aimerez peut-être aussi
- Chapter 2 - Discrete Time Signals and SystemsDocument81 pagesChapter 2 - Discrete Time Signals and Systemsdvishwakarma1796Pas encore d'évaluation
- Why DSP is ImportantDocument54 pagesWhy DSP is Importantshivam vashistPas encore d'évaluation
- EEE6209 Advanced Digital Signal Processing (ADSP) : DR Charith Abhayaratne (CA)Document24 pagesEEE6209 Advanced Digital Signal Processing (ADSP) : DR Charith Abhayaratne (CA)dialauchennaPas encore d'évaluation
- The Concept of System': - Discrete-Time SystemsDocument19 pagesThe Concept of System': - Discrete-Time SystemsFatmir KelmendiPas encore d'évaluation
- Discrete Time Signals&systemsDocument24 pagesDiscrete Time Signals&systemsRogers Rodri ShayoPas encore d'évaluation
- CH 05Document31 pagesCH 05KavunPas encore d'évaluation
- Unit I: Discrete Time Signals and Systems: Dr. Raghu Indrakanti, Ph.D. Assistant Professor E.C.E DepartmentDocument47 pagesUnit I: Discrete Time Signals and Systems: Dr. Raghu Indrakanti, Ph.D. Assistant Professor E.C.E Departmentanil kumarPas encore d'évaluation
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Document14 pagesDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunPas encore d'évaluation
- 455DTSigSys HandoutsDocument16 pages455DTSigSys HandoutsMuhammad Tariq SadiqPas encore d'évaluation
- Module02 ISP PDFDocument33 pagesModule02 ISP PDFMuqaddas IshaqPas encore d'évaluation
- Ec3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Document41 pagesEc3354-Signals and Systems-858759966-Ss QB - 2023-06-10T151453.626Music LoverPas encore d'évaluation
- In Summary ContinuousDocument55 pagesIn Summary ContinuousFatmir KelmendiPas encore d'évaluation
- Semeste1 DSP Lec2Document15 pagesSemeste1 DSP Lec2صوت التمارPas encore d'évaluation
- Lecture 3 DSP Discrete-Time Signals and SystemsDocument11 pagesLecture 3 DSP Discrete-Time Signals and SystemsManish PadhraPas encore d'évaluation
- CHP 1 (Completed)Document61 pagesCHP 1 (Completed)Ronaldo KmePas encore d'évaluation
- ConvolutionDocument32 pagesConvolutionGirijesh Kumar100% (2)
- Digital Signal Processing Lecture+5,+January+20thDocument36 pagesDigital Signal Processing Lecture+5,+January+20thGASR2017Pas encore d'évaluation
- Ec8352-Signals and SystemsDocument13 pagesEc8352-Signals and Systemsazhagank28062003Pas encore d'évaluation
- Discrete-Time Signals & SystemsDocument83 pagesDiscrete-Time Signals & SystemsSHAHRIAR MAHMUD SABUJ 1604013Pas encore d'évaluation
- Multirate DSP Part 1 (Read-Only)Document38 pagesMultirate DSP Part 1 (Read-Only)stephanPas encore d'évaluation
- Fourier Analysis of Signals and SystemsDocument24 pagesFourier Analysis of Signals and SystemsBabul IslamPas encore d'évaluation
- L35 - 27th NovDocument13 pagesL35 - 27th Novakash chPas encore d'évaluation
- 1 SignalsDocument17 pages1 SignalsTingyang YUPas encore d'évaluation
- Signals & Systems Lecture Overview: Time-Domain, Fourier, Z Transforms & Digital FiltersDocument55 pagesSignals & Systems Lecture Overview: Time-Domain, Fourier, Z Transforms & Digital FiltersWaqas Akram GondalPas encore d'évaluation
- Link Delay: - Processing Delay - Queuing Delay - Transmission Delay - Propagation DelayDocument53 pagesLink Delay: - Processing Delay - Queuing Delay - Transmission Delay - Propagation DelayKetki SawantPas encore d'évaluation
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinIr Wn IkaarinaPas encore d'évaluation
- EE330 DSP: Discrete Time Signals and SystemsDocument43 pagesEE330 DSP: Discrete Time Signals and SystemsRakhmeen gulPas encore d'évaluation
- IT 1252 - Digital Signal ProcessingDocument22 pagesIT 1252 - Digital Signal Processinganon-384794100% (3)
- Ch2 (3) Handouts 3e PDFDocument10 pagesCh2 (3) Handouts 3e PDFAnonymous eiYUGFJZ3iPas encore d'évaluation
- Neural Networks for Time Series PredictionDocument42 pagesNeural Networks for Time Series PredictionboynaduaPas encore d'évaluation
- Discrete-Time Signal & SystemDocument20 pagesDiscrete-Time Signal & SystemismailPas encore d'évaluation
- Discrete - Time Systems Discrete - Time Systems: ExamplesDocument17 pagesDiscrete - Time Systems Discrete - Time Systems: ExamplesSandhya SandyPas encore d'évaluation
- Unit I - Discrete Fourier Transform Part - ADocument10 pagesUnit I - Discrete Fourier Transform Part - AindhuPas encore d'évaluation
- Discrete-Time Signals and SystemsDocument11 pagesDiscrete-Time Signals and SystemsCharan Priya MangipudyPas encore d'évaluation
- Discrete Time SignalDocument11 pagesDiscrete Time Signaldheerajdb99Pas encore d'évaluation
- Classification of Signals & Systems: PresentationDocument36 pagesClassification of Signals & Systems: PresentationRamya NPas encore d'évaluation
- Classification of Signals & Systems: PresentationDocument36 pagesClassification of Signals & Systems: PresentationRajeePas encore d'évaluation
- Representation of Discrete-Time SystemsDocument17 pagesRepresentation of Discrete-Time SystemsSabu GeorgePas encore d'évaluation
- CT and DT Signals, Systems and PropertiesDocument69 pagesCT and DT Signals, Systems and PropertiesSivaKumar AnandanPas encore d'évaluation
- DSP Qs 2marksDocument36 pagesDSP Qs 2marksanon_624151290Pas encore d'évaluation
- DSP Lab RecordDocument97 pagesDSP Lab RecordLikhita UttamPas encore d'évaluation
- Random Processes IDocument35 pagesRandom Processes IDavid SiegfriedPas encore d'évaluation
- Astu - Ece 3205 - A.y: 2019/2020 1Document34 pagesAstu - Ece 3205 - A.y: 2019/2020 1Bekele L. DebessaPas encore d'évaluation
- Frequency Response Analysis and Design PDFDocument281 pagesFrequency Response Analysis and Design PDFfergusonisePas encore d'évaluation
- L29: Fourier AnalysisDocument29 pagesL29: Fourier AnalysisHarshPas encore d'évaluation
- Ni Two Marks - NewDocument37 pagesNi Two Marks - NewAnuishuya SugumaranPas encore d'évaluation
- Digital Signal Processing: Course OutlineDocument52 pagesDigital Signal Processing: Course OutlinefikretPas encore d'évaluation
- Mumbai University DTSP EXTC Viva Questions AnswersDocument36 pagesMumbai University DTSP EXTC Viva Questions AnswersPritam KadamPas encore d'évaluation
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)D'EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Pas encore d'évaluation
- Two-Degree-of-Freedom Control Systems: The Youla Parameterization ApproachD'EverandTwo-Degree-of-Freedom Control Systems: The Youla Parameterization ApproachPas encore d'évaluation
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankD'EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankPas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- RFICDocument25 pagesRFICSoumya MahapatraPas encore d'évaluation
- Understanding the ISO-OSI 7-Layer ModelDocument23 pagesUnderstanding the ISO-OSI 7-Layer ModelajayraghuPas encore d'évaluation
- Lecture 1Document20 pagesLecture 1Mukesh RaiyaPas encore d'évaluation
- Lecture 02 DSPDocument17 pagesLecture 02 DSPajayraghuPas encore d'évaluation
- DSPDocument13 pagesDSPanshujjainPas encore d'évaluation
- Machine Learning Approach For Anomaly Detection in Wireless Sensor DataDocument15 pagesMachine Learning Approach For Anomaly Detection in Wireless Sensor DataajayraghuPas encore d'évaluation
- DSP Lab Manual Version 7 1Document60 pagesDSP Lab Manual Version 7 1ajayraghuPas encore d'évaluation
- Application of Smith ChartDocument21 pagesApplication of Smith ChartajayraghuPas encore d'évaluation
- Data Collection in Wireless Sensor Networks With Mobile Elements: A SurveyDocument34 pagesData Collection in Wireless Sensor Networks With Mobile Elements: A SurveyajayraghuPas encore d'évaluation
- 222Document6 pages222ajayraghuPas encore d'évaluation
- Breathing AND Exchange of Gases MCQs PDFDocument78 pagesBreathing AND Exchange of Gases MCQs PDFJatin SinglaPas encore d'évaluation
- (Artigo) - Non-Oriented Electrical Steel Sheets - D. S. PETROVI PDFDocument9 pages(Artigo) - Non-Oriented Electrical Steel Sheets - D. S. PETROVI PDFcandongueiroPas encore d'évaluation
- Reed - Camion - XT39R4 - 1003 - Technical Manual - Panel de Control PDFDocument293 pagesReed - Camion - XT39R4 - 1003 - Technical Manual - Panel de Control PDFLuisEduardoHerreraCamargo100% (1)
- Puppo, F. (2012) - Dalla Vaghezza Del Linguaggio Alla Retorica Forense. Saggio Di Logica GiuridicaDocument3 pagesPuppo, F. (2012) - Dalla Vaghezza Del Linguaggio Alla Retorica Forense. Saggio Di Logica GiuridicaAldunIdhunPas encore d'évaluation
- BUS STAT Chapter-3 Freq DistributionDocument5 pagesBUS STAT Chapter-3 Freq DistributionolmezestPas encore d'évaluation
- SECTION 2-07 Fire Protection: Airplane Operations ManualDocument26 pagesSECTION 2-07 Fire Protection: Airplane Operations ManualAnish ShakyaPas encore d'évaluation
- Innovative Lesson PlanDocument12 pagesInnovative Lesson PlanMurali Sambhu33% (3)
- Swiftautoid SA T9680 Black Series 2D Imager Andriod Industrial TabletDocument2 pagesSwiftautoid SA T9680 Black Series 2D Imager Andriod Industrial TabletAirul MutaqinPas encore d'évaluation
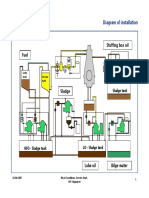
- Westfalia Separator Installation DiagramDocument68 pagesWestfalia Separator Installation DiagramOno Jr Araza100% (3)
- Irfp4768Pbf: Application V 250V R 14.5M 17.5M I 93ADocument9 pagesIrfp4768Pbf: Application V 250V R 14.5M 17.5M I 93AKrishna InamdarPas encore d'évaluation
- Hemi EngineDocument23 pagesHemi Enginesurendrabarwar7Pas encore d'évaluation
- Seamless Steel Tubes and Pipes For BoilersDocument20 pagesSeamless Steel Tubes and Pipes For BoilersABChungBAPas encore d'évaluation
- Migrating Your SQL Server Workloads To PostgreSQL - Part 3 - CodeProjectDocument6 pagesMigrating Your SQL Server Workloads To PostgreSQL - Part 3 - CodeProjectgfgomesPas encore d'évaluation
- tc107 Research PaperDocument6 pagestc107 Research PaperAtharva BhidePas encore d'évaluation
- Experimentalstudies On The Effects of Reduction in Gear Tooth Stiffness Lubricant Film Thicknessina Spur Geared SystemDocument13 pagesExperimentalstudies On The Effects of Reduction in Gear Tooth Stiffness Lubricant Film Thicknessina Spur Geared SystemBurak TuncerPas encore d'évaluation
- 2023 Key Stage 2 Mathematics Braille Transcript Paper 1 ArithmeticDocument8 pages2023 Key Stage 2 Mathematics Braille Transcript Paper 1 ArithmeticMini WorldPas encore d'évaluation
- Cs8080 - Irt - Notes AllDocument281 pagesCs8080 - Irt - Notes Allmukeshmsd2Pas encore d'évaluation
- Pure Unit 1 Topic Test FINALDocument8 pagesPure Unit 1 Topic Test FINALHPas encore d'évaluation
- Parts of The NailDocument22 pagesParts of The NailMariel Balmes Hernandez100% (1)
- FY&ZM JofHY (ASCE) 1943-7900Document12 pagesFY&ZM JofHY (ASCE) 1943-7900DM1988MM1Pas encore d'évaluation
- Data Communication & Computer NetworksDocument32 pagesData Communication & Computer NetworksMuhammad NadeemPas encore d'évaluation
- Binder 1Document36 pagesBinder 1BobbyPas encore d'évaluation
- SAP Table BufferingDocument31 pagesSAP Table Bufferingashok_oleti100% (3)
- Dev - Mag - 09Document26 pagesDev - Mag - 09georgpiorczynskiPas encore d'évaluation
- 25 Most Frequently Asked DSA Questions in MAANGDocument17 pages25 Most Frequently Asked DSA Questions in MAANGPranjalPas encore d'évaluation
- Use Jinja2 To Create TemplatesDocument44 pagesUse Jinja2 To Create TemplatesmPas encore d'évaluation
- SM Maintenance Instructions: Author: Lars Rydén, Konecranes AB, SwedenDocument132 pagesSM Maintenance Instructions: Author: Lars Rydén, Konecranes AB, SwedenDan VekasiPas encore d'évaluation
- Modeling Confined Masonry Walls with OpeningsDocument11 pagesModeling Confined Masonry Walls with OpeningsMangisi Haryanto ParapatPas encore d'évaluation
- Engineering Physics Question BankDocument10 pagesEngineering Physics Question BankReji K DhamanPas encore d'évaluation