Vous aimerez peut-être aussi
- Spring - Axial Load Only: C AE/L and C EI/L Frame in Global Coordinate K (E/L) X (K) (K)Document4 pagesSpring - Axial Load Only: C AE/L and C EI/L Frame in Global Coordinate K (E/L) X (K) (K)Azmi Bin A MataliPas encore d'évaluation
- AC CIRCUITS Practice ProblemsDocument2 pagesAC CIRCUITS Practice ProblemsSee MoorePas encore d'évaluation
- Questions On Electrical Machine Applications Armature Reaction and CommutationDocument12 pagesQuestions On Electrical Machine Applications Armature Reaction and Commutationkibrom atsbhaPas encore d'évaluation
- ENT600 - Case Study Technopreneur Guidelines MIHDocument5 pagesENT600 - Case Study Technopreneur Guidelines MIHKim HanaPas encore d'évaluation
- CE Board Nov 2020 - RCD - Set 2 ColoredDocument2 pagesCE Board Nov 2020 - RCD - Set 2 ColoredDale MalazzabPas encore d'évaluation
- Engineering Science Question and Answers-1Document56 pagesEngineering Science Question and Answers-1simon hovePas encore d'évaluation
- Concrete 19 (FDN 6) Nov 2020Document1 pageConcrete 19 (FDN 6) Nov 2020Dale MalazzabPas encore d'évaluation
- Review Materials EngineeringDocument29 pagesReview Materials EngineeringjcPas encore d'évaluation
- Unit 1Document50 pagesUnit 1Santhosh KumarPas encore d'évaluation
- Present EconomyDocument21 pagesPresent EconomyKhryz Anne AvilaPas encore d'évaluation
- 04 - First Order SystemDocument16 pages04 - First Order SystemNayyar RazaPas encore d'évaluation
- Module 5 WearDocument23 pagesModule 5 WearrohanPas encore d'évaluation
- Tarea 2. Design - of - Machinery NortonDocument10 pagesTarea 2. Design - of - Machinery Nortonbisiosote100% (1)
- 100+ Control Systems Multiple Choice Questions With AnswersDocument55 pages100+ Control Systems Multiple Choice Questions With AnswersPREMPas encore d'évaluation
- Excel Review: A: Large B: Highest C: Most D: MaximumDocument4 pagesExcel Review: A: Large B: Highest C: Most D: MaximumkbfalknerPas encore d'évaluation
- Undamped Forced VibrationDocument10 pagesUndamped Forced VibrationnadinePas encore d'évaluation
- Assignment-1: Introduction To Computing EE-112Document20 pagesAssignment-1: Introduction To Computing EE-112Khawaja UsmanPas encore d'évaluation
- Transfer Function ExercisesDocument2 pagesTransfer Function ExercisesrodwellheadPas encore d'évaluation
- D.C. Machin BaidaDocument53 pagesD.C. Machin BaidaLeonard ValdezPas encore d'évaluation
- Compound Bar LECTURE 14Document5 pagesCompound Bar LECTURE 14Zein Elserfy100% (1)
- Zener EffectDocument2 pagesZener EffectAkash DeepPas encore d'évaluation
- Engineering EconomyDocument11 pagesEngineering EconomyJune CostalesPas encore d'évaluation
- Introduction To First Order SystemsDocument4 pagesIntroduction To First Order SystemsSyafiiqahPas encore d'évaluation
- Unit 4Document23 pagesUnit 4eyobPas encore d'évaluation
- ECEG 3175 Lecture 1Document21 pagesECEG 3175 Lecture 1Jodan Mes0% (1)
- Electronics FormulasDocument3 pagesElectronics FormulasSynworks Development GroupPas encore d'évaluation
- Engg Management - Chapter - 10Document9 pagesEngg Management - Chapter - 10John Rexel CaroPas encore d'évaluation
- Advantages and Disadvantages Each MaterialDocument25 pagesAdvantages and Disadvantages Each MaterialPewe WulandariPas encore d'évaluation
- Chapter 2, TransformerDocument28 pagesChapter 2, Transformertemesgen adugnaPas encore d'évaluation
- Dy DX: Lny 5 X +LNCDocument12 pagesDy DX: Lny 5 X +LNCWenaBacxPas encore d'évaluation
- Activity 6890Document3 pagesActivity 6890Raymond Gicalde RementillaPas encore d'évaluation
- Quiz Cee 501Document5 pagesQuiz Cee 501Tina RosalesPas encore d'évaluation
- Lec 3 245138840Document12 pagesLec 3 245138840William J ThompsonPas encore d'évaluation
- Experiment 1Document3 pagesExperiment 1Ariel GamboaPas encore d'évaluation
- Short Circuit Test On A Single Phase TransformerDocument2 pagesShort Circuit Test On A Single Phase TransformerReyar SenoPas encore d'évaluation
- FeedCon (Unit 1) PDFDocument17 pagesFeedCon (Unit 1) PDFAbby MacallaPas encore d'évaluation
- AMDocument15 pagesAMAnonymous oTwHSWV1NPas encore d'évaluation
- RAC Case StudyDocument11 pagesRAC Case StudyshubhamPas encore d'évaluation
- Signal Spectra, Signal ProcessingDocument16 pagesSignal Spectra, Signal ProcessingJc Bernabe DazaPas encore d'évaluation
- An Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlDocument5 pagesAn Enhanced Simulation Model For DC Motor Belt Drive Conveyor System ControlArif AfifPas encore d'évaluation
- Study of Universal Testing MachineDocument12 pagesStudy of Universal Testing MachineAfia S HameedPas encore d'évaluation
- Chapter 1 - General: National Electrical Code of The PhilippinesDocument63 pagesChapter 1 - General: National Electrical Code of The PhilippinesAlex de Guzman100% (1)
- Chapter 2: Introduction To MATLAB Programming: January 2017Document14 pagesChapter 2: Introduction To MATLAB Programming: January 2017Pandu KPas encore d'évaluation
- Lec2 Numerical ModelDocument54 pagesLec2 Numerical ModelNoorLiana Mahmud100% (1)
- Strength of MaterialsDocument10 pagesStrength of MaterialsCaro Kan LopezPas encore d'évaluation
- ACE 10L - AC/DC Machinery 1LDocument6 pagesACE 10L - AC/DC Machinery 1LSky FallPas encore d'évaluation
- Ce 402 Expt 7-8Document16 pagesCe 402 Expt 7-8veeveegarcia_Pas encore d'évaluation
- + 18y + 8y - 4 Is Divided byDocument27 pages+ 18y + 8y - 4 Is Divided byAndrea Sochayseng Solijon100% (1)
- Tutorial CT TransformerDocument4 pagesTutorial CT TransformerKamal NorliePas encore d'évaluation
- Lecture 1 The Philippine Electrical Code PDFDocument16 pagesLecture 1 The Philippine Electrical Code PDFApocalypse CabalPas encore d'évaluation
- Potentiometer Working PricipleDocument3 pagesPotentiometer Working PricipleEti-ini AkpanPas encore d'évaluation
- System of Linear Equations: Direct & Iterative MethodsDocument36 pagesSystem of Linear Equations: Direct & Iterative MethodsLam WongPas encore d'évaluation
- Case 1Document3 pagesCase 1ianiroy13Pas encore d'évaluation
- Advanced Engg Math PDFDocument155 pagesAdvanced Engg Math PDFVincentPas encore d'évaluation
- Transfer Function Response of First OrderDocument19 pagesTransfer Function Response of First OrderRatnesh PandeyPas encore d'évaluation
- Dynamic Characteristics of Measuring SystemsDocument102 pagesDynamic Characteristics of Measuring Systemssunil48175% (4)
- CHE160 2022-2023 Module4Document39 pagesCHE160 2022-2023 Module4anthonyPas encore d'évaluation
- First-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeDocument3 pagesFirst-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeAnand RajPas encore d'évaluation
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزPas encore d'évaluation
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsD'EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsPas encore d'évaluation
- Race Condition in J-K LatchDocument14 pagesRace Condition in J-K LatchTejas DharaniPas encore d'évaluation
- Cisco Nexus 9300 Platform Leaf Switches For Cisco Application Centric InfrastructureDocument12 pagesCisco Nexus 9300 Platform Leaf Switches For Cisco Application Centric InfrastructureMahmoud RamadanPas encore d'évaluation
- TE30 Electricity Meter Tester and Power Quality Analyzer Presentation enDocument19 pagesTE30 Electricity Meter Tester and Power Quality Analyzer Presentation enalejandroPas encore d'évaluation
- Low Noise, Low Power Op Amp: Features DescriptionDocument28 pagesLow Noise, Low Power Op Amp: Features DescriptionSwapnil BangarPas encore d'évaluation
- Fuel CellDocument14 pagesFuel CellJohnNeilBiberaPas encore d'évaluation
- Catalog Vod RecorderDocument7 pagesCatalog Vod RecorderAbdiyasa Dharma Inovasi100% (1)
- U-Boot Porting GuideDocument7 pagesU-Boot Porting GuideimioPas encore d'évaluation
- PC Hardware Servicing: Chapter 13: Managing CD DrivesDocument19 pagesPC Hardware Servicing: Chapter 13: Managing CD DrivesAmir M. VillasPas encore d'évaluation
- RADAR BRIDGE MASTER ''E'' Series Radar Ship's ManualDocument161 pagesRADAR BRIDGE MASTER ''E'' Series Radar Ship's Manualtoumassis_p100% (11)
- TGS 2611C00 (1013)Document2 pagesTGS 2611C00 (1013)R GikiswantoPas encore d'évaluation
- ColorimetryDocument6 pagesColorimetryRaazia MirPas encore d'évaluation
- Power Electronics Ned Mohan Slides Ch29Document12 pagesPower Electronics Ned Mohan Slides Ch29Anoop MathewPas encore d'évaluation
- Micno Ke300a 01 Solar Pump Inverter CatalogDocument8 pagesMicno Ke300a 01 Solar Pump Inverter CatalogIbrahima DialloPas encore d'évaluation
- 2 - Alternating - Currents (Autosaved)Document33 pages2 - Alternating - Currents (Autosaved)kdPas encore d'évaluation
- Accurate and Dependable Roll Hardness TestingDocument2 pagesAccurate and Dependable Roll Hardness TestingJabranYounasPas encore d'évaluation
- Tractel Skybeam ManualDocument32 pagesTractel Skybeam ManualDanilo PretinhoPas encore d'évaluation
- Gate Mock Test1Document17 pagesGate Mock Test1Gopinathan SudheerPas encore d'évaluation
- Physics ProjectDocument16 pagesPhysics ProjectNAYAN DARYANIPas encore d'évaluation
- 2009MY CM Manual AC SystemDocument4 pages2009MY CM Manual AC SystemHumberto LojanPas encore d'évaluation
- NCERT Solutions Class 12 Chemistry Chapter 9 Coordination CompoundsDocument21 pagesNCERT Solutions Class 12 Chemistry Chapter 9 Coordination CompoundsVidyakulPas encore d'évaluation
- CapacitorsDocument21 pagesCapacitorsNathan BerhanuPas encore d'évaluation
- Cara Update - Windows Phone 8.1. Ke Update 2Document4 pagesCara Update - Windows Phone 8.1. Ke Update 2Eddy Irawan BatunaPas encore d'évaluation
- FPD 7024 Datasheet Data Sheet enUS 2692360331Document4 pagesFPD 7024 Datasheet Data Sheet enUS 2692360331Danilo BarreraPas encore d'évaluation
- Acoustic Noise Cancellation: From Matlab and Simulink To Real Time With Ti DspsDocument26 pagesAcoustic Noise Cancellation: From Matlab and Simulink To Real Time With Ti DspsSapantan MariaPas encore d'évaluation
- XY Plotter V2.02 Software ManualsDocument13 pagesXY Plotter V2.02 Software Manualsluizcaldeira13Pas encore d'évaluation
- Maha Automation BrochureDocument12 pagesMaha Automation BrochureMahadevappagowdaPas encore d'évaluation
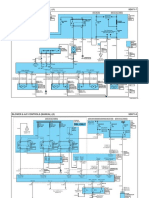
- WH627 Diagrama Elec.Document7 pagesWH627 Diagrama Elec.iker56777Pas encore d'évaluation
- LG 32,37,42lc2d-EcDocument61 pagesLG 32,37,42lc2d-EcvideosonPas encore d'évaluation
- Quiz - Frequency DistributionDocument2 pagesQuiz - Frequency Distributionivan anonuevo0% (1)
- Bender CT WabDocument3 pagesBender CT WabAndy Kong KingPas encore d'évaluation