Vous aimerez peut-être aussi
- Case Studies in Pipeline Free Span FatigueDocument10 pagesCase Studies in Pipeline Free Span FatiguejoaogularPas encore d'évaluation
- Seakeeping Tests (With Ships) : Experimental Methods in Marine Hydrodynamics Lecture in Week 43Document55 pagesSeakeeping Tests (With Ships) : Experimental Methods in Marine Hydrodynamics Lecture in Week 43Youngkook KimPas encore d'évaluation
- Seakeeping Tests (With Ships) : Experimental Methods in Marine Hydrodynamics Lecture in Week 43Document52 pagesSeakeeping Tests (With Ships) : Experimental Methods in Marine Hydrodynamics Lecture in Week 43Shaat KumarPas encore d'évaluation
- Seakeeping LectureDocument30 pagesSeakeeping Lectureknowme73100% (1)
- Protecting Submarine PipelinesDocument7 pagesProtecting Submarine Pipelinesazee_fastPas encore d'évaluation
- Supplement Free Span PDFDocument49 pagesSupplement Free Span PDFNovriyansi NainsaPas encore d'évaluation
- Cap08&09 Ensaios OffshoreDocument50 pagesCap08&09 Ensaios OffshoreThalles Giangiarulo de AguiarPas encore d'évaluation
- Wave Attenuators Info PDFDocument32 pagesWave Attenuators Info PDFMicah Ironfalcon ArceñoPas encore d'évaluation
- Calculating Wave-Generated Bottom Orbital Velocities From Surface-Wave ParametersDocument20 pagesCalculating Wave-Generated Bottom Orbital Velocities From Surface-Wave Parametersgana slimPas encore d'évaluation
- Free Span Analysis PDFDocument57 pagesFree Span Analysis PDFJiggyMHT05 -Pas encore d'évaluation
- Turbulence Production in Flow Over A Wavy WallDocument9 pagesTurbulence Production in Flow Over A Wavy Wallsouliemana ibnou ahmedPas encore d'évaluation
- WSU Presentation 20220407Document63 pagesWSU Presentation 20220407debapriyoPas encore d'évaluation
- DOS2 - Loads On Offshore StructuresDocument30 pagesDOS2 - Loads On Offshore StructuresClint James100% (1)
- Cross-Flow Vibrations of A Pipe Close To A Rigid Boundary: V.JacobsenDocument7 pagesCross-Flow Vibrations of A Pipe Close To A Rigid Boundary: V.Jacobsen李智Pas encore d'évaluation
- Investigating The Effect of Wave Parameters On Wave RunupDocument7 pagesInvestigating The Effect of Wave Parameters On Wave RunupDinar IstiyantoPas encore d'évaluation
- Strength of Submarine Hoses in Chinese-Lantern Configuration From Hydrodynamic Loads On CALM BuoyDocument27 pagesStrength of Submarine Hoses in Chinese-Lantern Configuration From Hydrodynamic Loads On CALM BuoyIbrahim RahmatullahPas encore d'évaluation
- USACE ENGINEER MANUALS Single Beam Acoustic Depth Measurement TehhniquesDocument9 pagesUSACE ENGINEER MANUALS Single Beam Acoustic Depth Measurement TehhniquesWilly WidyatmakaPas encore d'évaluation
- Seismic Inversion PDFDocument73 pagesSeismic Inversion PDFAiman Zaini100% (1)
- Wave, Loads in The Fabrication, Tow-Out, & Installation Phases & Current LoadDocument48 pagesWave, Loads in The Fabrication, Tow-Out, & Installation Phases & Current LoadRayHarryPas encore d'évaluation
- Acoustic Flow Measurements and Technology: D. Hurther, LEGI Grenoble: General Introduction, AcousticDocument50 pagesAcoustic Flow Measurements and Technology: D. Hurther, LEGI Grenoble: General Introduction, AcousticMagalyPas encore d'évaluation
- Mooring Design PDFDocument17 pagesMooring Design PDFathul m100% (1)
- Ships HydrodynamicsDocument18 pagesShips Hydrodynamicsspsingh72Pas encore d'évaluation
- MScThesis JeroenVanAubel FinalDocument81 pagesMScThesis JeroenVanAubel FinalAliPas encore d'évaluation
- Class 10 - Free Span AnalysisDocument37 pagesClass 10 - Free Span AnalysisM R Patraputra100% (1)
- Lecture 1 - Wave Dynamics-An IntroDocument23 pagesLecture 1 - Wave Dynamics-An Introknowme73Pas encore d'évaluation
- 1 CES UserGuide PDFDocument115 pages1 CES UserGuide PDFsandhyaPas encore d'évaluation
- Class 10 Free Span AnalysisDocument37 pagesClass 10 Free Span AnalysisLK AnhDungPas encore d'évaluation
- Numerical Investigation of The Seakeeping Behavior of A CatamaranDocument17 pagesNumerical Investigation of The Seakeeping Behavior of A CatamaranVăn Sương SỳPas encore d'évaluation
- 2009 BruningDocument12 pages2009 Bruningmadhumster1240Pas encore d'évaluation
- Chapter2waveandtides 180204112927Document76 pagesChapter2waveandtides 180204112927muhammad usman HaiderPas encore d'évaluation
- Seakeeping Methods Lecture - Alto UniversityDocument35 pagesSeakeeping Methods Lecture - Alto UniversityajayPas encore d'évaluation
- Wave SpectraDocument4 pagesWave SpectraRahulnath RPas encore d'évaluation
- Radojcic - On High Speed Mono.2010.SYMPDocument19 pagesRadojcic - On High Speed Mono.2010.SYMPnavalarchmarine100% (1)
- Chan (2012)Document6 pagesChan (2012)Mohamed MagdiPas encore d'évaluation
- Ocean Engineering: Hee Min Teh, Vengatesan VenugopalDocument17 pagesOcean Engineering: Hee Min Teh, Vengatesan VenugopalpsuvarnasPas encore d'évaluation
- Rsu Drilling Mooring Riser ProposalDocument9 pagesRsu Drilling Mooring Riser ProposalCROSSFIELD ENGINEERING ENERGYPas encore d'évaluation
- Depth Measuring TechniquesDocument46 pagesDepth Measuring TechniquesMuhd Farhan KammooPas encore d'évaluation
- Basic Wave Theory Review: Graham Warren Bureau of Meteorology AustraliaDocument33 pagesBasic Wave Theory Review: Graham Warren Bureau of Meteorology AustraliaManthanPas encore d'évaluation
- Wavescan Buoy PDFDocument4 pagesWavescan Buoy PDFRam MugeshPas encore d'évaluation
- Wavescan Buoy PDFDocument4 pagesWavescan Buoy PDFRam MugeshPas encore d'évaluation
- Numerical Modelling of Vortex Induced VibrationsDocument6 pagesNumerical Modelling of Vortex Induced VibrationscteranscribdPas encore d'évaluation
- Hydrodynamic Forces On Subsea Pipelines - KarremanDocument6 pagesHydrodynamic Forces On Subsea Pipelines - KarremanAlberto darianPas encore d'évaluation
- On Bottom Stability PresentationDocument65 pagesOn Bottom Stability PresentationaddypurnamaPas encore d'évaluation
- 1 s2.0 S0263224198000360 MainDocument10 pages1 s2.0 S0263224198000360 MainPablo VilarPas encore d'évaluation
- Speed Log: Speed Through Water (STW) Speed Over Ground (SOG)Document20 pagesSpeed Log: Speed Through Water (STW) Speed Over Ground (SOG)bandar2Pas encore d'évaluation
- OMAE 005022: Offshore Viv Monitoring at Schiehallion - Analysis of Riser Viv ResponseDocument9 pagesOMAE 005022: Offshore Viv Monitoring at Schiehallion - Analysis of Riser Viv ResponseCarlos A MoyaPas encore d'évaluation
- M C DeoDocument357 pagesM C Deoumar_contactPas encore d'évaluation
- Lisa - KingDocument6 pagesLisa - KingamirPas encore d'évaluation
- StructuralAnalysesOfJack upsInElevatedConditionDocument12 pagesStructuralAnalysesOfJack upsInElevatedConditionNavalArchitecturePas encore d'évaluation
- Coastal Embankment DesignDocument76 pagesCoastal Embankment Designkabir100% (2)
- Metocean FS Technology Review: (WRT ST Albans 2001)Document32 pagesMetocean FS Technology Review: (WRT ST Albans 2001)Aleksandr FilonenkoPas encore d'évaluation
- Extreme Response of Dynamic Umbilicals IDocument18 pagesExtreme Response of Dynamic Umbilicals Ixinlin.cppPas encore d'évaluation
- Orcaflex OrcinaDocument40 pagesOrcaflex OrcinaPeggy Jan QorbanPas encore d'évaluation
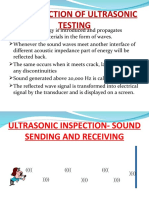
- Introduction of Ultrasonic TestingDocument70 pagesIntroduction of Ultrasonic TestingMAXX ENGINEERS100% (1)
- PIPE STRESS ANALYSIS - FIV - AIV (Compatibility Mode)Document48 pagesPIPE STRESS ANALYSIS - FIV - AIV (Compatibility Mode)salma khalilaa putrii 6D100% (1)
- Geophysics For GeologistsDocument175 pagesGeophysics For GeologistsyunusjanPas encore d'évaluation
- Broaching of Small BoatsDocument12 pagesBroaching of Small BoatsNourin Obaid DinaPas encore d'évaluation
- 02 Coastal Processes, Winds and CurrentsDocument17 pages02 Coastal Processes, Winds and CurrentsAnton MPas encore d'évaluation
- Transducer Handbook: User's Directory of Electrical TransducersD'EverandTransducer Handbook: User's Directory of Electrical TransducersPas encore d'évaluation
- Beam Diagram and FormulaDocument4 pagesBeam Diagram and FormulaandrairawanPas encore d'évaluation
- Orca FlexDocument13 pagesOrca FlexandrairawanPas encore d'évaluation
- I01 Douglas-Westwood - Calvin Ling - APAC Pipeline Market OutlookDocument15 pagesI01 Douglas-Westwood - Calvin Ling - APAC Pipeline Market OutlookandrairawanPas encore d'évaluation
- IHC Hammer CatalogueDocument48 pagesIHC Hammer Catalogueandrairawan100% (3)
- Problem Set - FinalsDocument3 pagesProblem Set - FinalsJason TylerPas encore d'évaluation
- Correl 2 Until MidtermsDocument23 pagesCorrel 2 Until MidtermsKimberly TacaisanPas encore d'évaluation
- Fundamentals of Aerodynamics Chapter 1 NotesDocument27 pagesFundamentals of Aerodynamics Chapter 1 NotesHari AdityaPas encore d'évaluation
- Size Effects in Manufacturing of Metallic ComponentsDocument22 pagesSize Effects in Manufacturing of Metallic ComponentslelixPas encore d'évaluation
- Simple Machines, Work, Force, Energy, and Newton'S Three Laws of Motion What Is A Simple Machine?Document11 pagesSimple Machines, Work, Force, Energy, and Newton'S Three Laws of Motion What Is A Simple Machine?Spoorthy KrishnaPas encore d'évaluation
- HD5395TS: Technical SpecificationDocument10 pagesHD5395TS: Technical Specificationdaniel_jorge_10Pas encore d'évaluation
- Lab (2) Coefficient of FrictionDocument5 pagesLab (2) Coefficient of FrictionMuhammad HuzaifaPas encore d'évaluation
- Chiorino Conveyor Belts For Packed Food 26jan11Document1 pageChiorino Conveyor Belts For Packed Food 26jan11navneet jainPas encore d'évaluation
- Low of Motion (S.C.Q.) EDocument67 pagesLow of Motion (S.C.Q.) Eraj100% (3)
- Free Body Diagrams: Dr. Jacob Moore Associate Professor of Engineering Penn State Mont AltoDocument17 pagesFree Body Diagrams: Dr. Jacob Moore Associate Professor of Engineering Penn State Mont AltoPRATHU SINGHPas encore d'évaluation
- Iit Jee 2007 Paper 1Document23 pagesIit Jee 2007 Paper 1Kunal GourPas encore d'évaluation
- FrictionDocument4 pagesFrictionMuzafar ahmadPas encore d'évaluation
- Mahindra FileDocument28 pagesMahindra FileManoj SainiPas encore d'évaluation
- Circular Motion ProblemDocument32 pagesCircular Motion ProblemAnjani SinghPas encore d'évaluation
- The Simple Pendulum Experiment and Conclusion LabDocument5 pagesThe Simple Pendulum Experiment and Conclusion LabKing Jones50% (2)
- Friction DampersDocument10 pagesFriction DampersChetan B Arkasali100% (1)
- Answer - Physics Student Book 1Document26 pagesAnswer - Physics Student Book 1Nana NanaPas encore d'évaluation
- Equilibrium, Free Body Diagram, Friction and Problem Solving CommentsDocument3 pagesEquilibrium, Free Body Diagram, Friction and Problem Solving CommentsdambaPas encore d'évaluation
- Measuring Paved Surface Frictional Properties Using The Dynamic Friction TesterDocument8 pagesMeasuring Paved Surface Frictional Properties Using The Dynamic Friction TesterDannyChaconPas encore d'évaluation
- Sri Chaitanya IIT Academy - India: New C2 Ipl (%Document4 pagesSri Chaitanya IIT Academy - India: New C2 Ipl (%MADDINENI VASU80% (5)
- Physics 11 SummaryDocument8 pagesPhysics 11 SummaryJ100% (5)
- Static Electricity ExplainedDocument6 pagesStatic Electricity ExplainedAnnie KuhnPas encore d'évaluation
- Unit IDocument3 pagesUnit Imahendra babu mekalaPas encore d'évaluation
- 0.13 PhysicsDocument4 pages0.13 PhysicsKaung Khant ZawPas encore d'évaluation
- FrictionDocument8 pagesFrictionperalta78Pas encore d'évaluation
- Physics 11 4thDocument2 pagesPhysics 11 4thArseniojakejr FloresPas encore d'évaluation
- JWST Brushless DC Motor Characteristics Analysis 2-5-2016Document13 pagesJWST Brushless DC Motor Characteristics Analysis 2-5-2016anhntran4850Pas encore d'évaluation
- Fundamentals of Physics 11th Edition Halliday Test BankDocument26 pagesFundamentals of Physics 11th Edition Halliday Test Bankdorissamuelqpnrrz100% (34)
- Rubber Covered RollDocument26 pagesRubber Covered RollAshwani SharmaPas encore d'évaluation
- Brake SystemDocument38 pagesBrake Systemapi-26140644100% (6)