Vous aimerez peut-être aussi
- Determination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitDocument4 pagesDetermination of The Equivalent Circuit Parameters of A Transformer and Calculation of Efficiency and Regulation Using Equivalent CircuitMd Rion100% (1)
- 5.2 Velocity-Graphical PDFDocument9 pages5.2 Velocity-Graphical PDFBanu FahiraPas encore d'évaluation
- Online Lab - Me Lab1 Expt 2 Area MeasurementDocument5 pagesOnline Lab - Me Lab1 Expt 2 Area MeasurementDessa GuditoPas encore d'évaluation
- Chapter 4 (1) & (2) Homework SolutionDocument18 pagesChapter 4 (1) & (2) Homework SolutionAnderson Niño Velasco0% (1)
- Problems Chapter 5 1Document7 pagesProblems Chapter 5 1Siva KumarPas encore d'évaluation
- PDFDocument3 pagesPDFRajkumar APas encore d'évaluation
- CH 19Document21 pagesCH 19Sanjay Kumar100% (1)
- Short Questions ECDDocument7 pagesShort Questions ECDNanda Kishore RayPas encore d'évaluation
- Mod-3. Spur GearDocument18 pagesMod-3. Spur GearSharthak GhoshPas encore d'évaluation
- SCILAB Elementary FunctionsDocument25 pagesSCILAB Elementary FunctionsMAnohar KumarPas encore d'évaluation
- Angular Momentum Principles - Fluid MechanicsDocument14 pagesAngular Momentum Principles - Fluid Mechanicsing_manceraPas encore d'évaluation
- Brayton CycleDocument5 pagesBrayton CycleDanang Wahdiat Aulia IshaqPas encore d'évaluation
- Bevel GearsDocument22 pagesBevel GearsNisarg MistryPas encore d'évaluation
- SHEET 1 SolutionDocument9 pagesSHEET 1 Solution171148 171148Pas encore d'évaluation
- CH 8 PDFDocument61 pagesCH 8 PDFGaurav Kumar100% (1)
- Vibration TwoDocument20 pagesVibration TwoFeeling_so_flyPas encore d'évaluation
- Soal-Jawab TrafoDocument5 pagesSoal-Jawab TrafoNizar SyamsudinPas encore d'évaluation
- Experiment 10: Junction Field Effect Transistor: Operation and Its Characteristic CurveDocument6 pagesExperiment 10: Junction Field Effect Transistor: Operation and Its Characteristic CurveDan Joshua EspinaPas encore d'évaluation
- Question Paper Bee Sem 1Document24 pagesQuestion Paper Bee Sem 1Roshan SuvarnaPas encore d'évaluation
- Paulino, Paul Tyrone R. Assignment 2Document14 pagesPaulino, Paul Tyrone R. Assignment 2Tyrone PaulinoPas encore d'évaluation
- CHAPTER 4 State Space Analysis and Desig PDFDocument43 pagesCHAPTER 4 State Space Analysis and Desig PDFbimam brefPas encore d'évaluation
- Tom-I Question Bank UpdatedDocument174 pagesTom-I Question Bank Updatedkiran_wakchaurePas encore d'évaluation
- Sheet 2 PDFDocument3 pagesSheet 2 PDFOmar Nashat100% (1)
- Flywheel ProblemsDocument51 pagesFlywheel Problemsgiriaj kokarePas encore d'évaluation
- BMEF17M001 ICE Assignment 2Document9 pagesBMEF17M001 ICE Assignment 2Muhammad Javed IqbalPas encore d'évaluation
- Btech 2nd Year Question PaperDocument32 pagesBtech 2nd Year Question PaperPolireddi Gopala KrishnaPas encore d'évaluation
- Unit-4 Induction MotorsDocument26 pagesUnit-4 Induction MotorsAnurag Singhal0% (1)
- Experiment No. 9: Aim: To Find The Mechanical Advantage, Velocity Ratio and Efficiency of Simple andDocument2 pagesExperiment No. 9: Aim: To Find The Mechanical Advantage, Velocity Ratio and Efficiency of Simple andShiva Krishna Bhagavatula50% (2)
- CH 4 - Process Control J5800Document49 pagesCH 4 - Process Control J5800mohd_mizanPas encore d'évaluation
- LEP 4.1.03 Internal Resistance and Matching in Voltage SourceDocument4 pagesLEP 4.1.03 Internal Resistance and Matching in Voltage SourceJohn CraftPas encore d'évaluation
- FMM - Unit Iv QBDocument52 pagesFMM - Unit Iv QBThiruvasagamoorthy KaPas encore d'évaluation
- Analysing Three Phase Circuits PDFDocument16 pagesAnalysing Three Phase Circuits PDFsenthilPas encore d'évaluation
- HET 225 HEt 228 Tutorial 3 Solution S2 2014Document4 pagesHET 225 HEt 228 Tutorial 3 Solution S2 2014Ibrahim Hussain0% (1)
- Assignment 6Document4 pagesAssignment 6Nandhalal100% (1)
- Lecture 29 Thermal Engineering II (10.09.2020)Document80 pagesLecture 29 Thermal Engineering II (10.09.2020)Dr. BIBIN CHIDAMBARANATHANPas encore d'évaluation
- DC Machines 1Document49 pagesDC Machines 1Michelle Flores100% (3)
- Civil-V-Transportation Engineering-1 (10CV56) - SolutionDocument92 pagesCivil-V-Transportation Engineering-1 (10CV56) - SolutionLokesh KPas encore d'évaluation
- Day 8 Plane Geometry December 01 20212Document51 pagesDay 8 Plane Geometry December 01 20212Free student100% (1)
- Steam TturbineDocument2 pagesSteam Tturbinemanish_chaturvedi_6Pas encore d'évaluation
- EM PPT II SemDocument398 pagesEM PPT II SemsridharanPas encore d'évaluation
- Experiment 2Document9 pagesExperiment 2Narry StrummerPas encore d'évaluation
- Q1. A Gas Turbine Power Plant Operating On An Ideal Brayton Cycle Has A Pressure Ratio of 8. TheDocument12 pagesQ1. A Gas Turbine Power Plant Operating On An Ideal Brayton Cycle Has A Pressure Ratio of 8. TheMary Grace VelitarioPas encore d'évaluation
- Short and Open Circuit Test On TransformerDocument1 pageShort and Open Circuit Test On TransformerRyan DagsilPas encore d'évaluation
- HW4 SolutionsDocument10 pagesHW4 SolutionsBrooklyn Luqii100% (1)
- MD ShaftDocument18 pagesMD Shaftiftikhar ahmedPas encore d'évaluation
- Auto TransformerDocument5 pagesAuto TransformerAugy HaerudyPas encore d'évaluation
- MSE 227 HW9 F10 SolutionsDocument5 pagesMSE 227 HW9 F10 Solutionsputri nur shahidaPas encore d'évaluation
- 1 (1) 4Document10 pages1 (1) 4Angga SeptianPas encore d'évaluation
- University of Bahrain Department of Mechanical Engineering MENG 263 TUTORIAL # 5 (Chapter 5)Document4 pagesUniversity of Bahrain Department of Mechanical Engineering MENG 263 TUTORIAL # 5 (Chapter 5)Vivin MathewPas encore d'évaluation
- ELECS M3M4 FAsDocument30 pagesELECS M3M4 FAsartPas encore d'évaluation
- Chapter 3 Steady State Single Phase AC Circuit Analysis Part 1Document24 pagesChapter 3 Steady State Single Phase AC Circuit Analysis Part 1temesgen adugnaPas encore d'évaluation
- Experiment 4Document5 pagesExperiment 4verbosePas encore d'évaluation
- Non Conventional Energy SystemsDocument52 pagesNon Conventional Energy SystemsRAMA RAJU PYDIPas encore d'évaluation
- Compression Test On Cast IronDocument11 pagesCompression Test On Cast IronEvan BoaloyPas encore d'évaluation
- Lec4 - Graphical Linkage SynthesisDocument27 pagesLec4 - Graphical Linkage SynthesisTheodore BaaPas encore d'évaluation
- Lecture 3 Graphical Linkage SynthesisDocument53 pagesLecture 3 Graphical Linkage SynthesisAmalinaPas encore d'évaluation
- Mechanism Synthesis, Graphical - Lect1Document22 pagesMechanism Synthesis, Graphical - Lect1Naveen KanchiPas encore d'évaluation
- Ch3graphical Linkage SynthesisDocument105 pagesCh3graphical Linkage SynthesisVishal PawarPas encore d'évaluation
- CH # 3 Lecture 2: Graphical Linkage SynthesisDocument10 pagesCH # 3 Lecture 2: Graphical Linkage SynthesisZia Ur RehmanPas encore d'évaluation
- 8 SynthesisDocument8 pages8 SynthesisSunilkumar ReddyPas encore d'évaluation
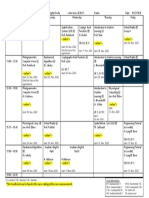
- WochenstundenplΣne CS4DM WS20-21 Stand 27Okt20Document1 pageWochenstundenplΣne CS4DM WS20-21 Stand 27Okt20Anas AsifPas encore d'évaluation
- Mechanical Engg Masters ProgramsDocument37 pagesMechanical Engg Masters ProgramsAnas AsifPas encore d'évaluation
- WochenstundenplΣne HCI WS20-21 Stand 27Okt20Document1 pageWochenstundenplΣne HCI WS20-21 Stand 27Okt20Anas AsifPas encore d'évaluation
- Italy Masters ProgramsDocument3 pagesItaly Masters ProgramsAnas AsifPas encore d'évaluation
- 1 Engine Types and OperationDocument57 pages1 Engine Types and OperationAnas AsifPas encore d'évaluation
- Stress Analysis (ME-416) 1Document47 pagesStress Analysis (ME-416) 1Anas AsifPas encore d'évaluation
- Mechanics of Materials: Pure BendingDocument42 pagesMechanics of Materials: Pure BendingAnas AsifPas encore d'évaluation
- Rules and Guidelines - GSD Musabaka 2017Document4 pagesRules and Guidelines - GSD Musabaka 2017Anas AsifPas encore d'évaluation
- Importing A Catia File Into SolidWorks With AdobeDocument2 pagesImporting A Catia File Into SolidWorks With AdobeAnas AsifPas encore d'évaluation
- CNC Milling Machine - FYP Final Report - V1Document57 pagesCNC Milling Machine - FYP Final Report - V1Anas Asif64% (11)
- Engineering Design Ch08 PG 1 of 2 SolmanDocument90 pagesEngineering Design Ch08 PG 1 of 2 Solmanbilly93Pas encore d'évaluation
- Chapter 6 Assig PDFDocument15 pagesChapter 6 Assig PDFAnas Asif100% (1)
- Mechanics of MaterialsDocument36 pagesMechanics of MaterialsAnas AsifPas encore d'évaluation
- ITC Lec 08 C++Document18 pagesITC Lec 08 C++Anas AsifPas encore d'évaluation
- ITC Lec06 Algorithms Flowcharts Pseudocode-IDocument11 pagesITC Lec06 Algorithms Flowcharts Pseudocode-IAnas AsifPas encore d'évaluation
- ITC Lec05 Computer Software and ProgrammingDocument11 pagesITC Lec05 Computer Software and ProgrammingAnas AsifPas encore d'évaluation
- Components of Computer and Data Representation: Saima JabeenDocument18 pagesComponents of Computer and Data Representation: Saima JabeenAnas AsifPas encore d'évaluation
- Semester Project C++Document4 pagesSemester Project C++Anas AsifPas encore d'évaluation
- Nav 2000Document4 pagesNav 2000Balaji TriplantPas encore d'évaluation
- CH 12 Review Solutions PDFDocument11 pagesCH 12 Review Solutions PDFOyinkansola OsiboduPas encore d'évaluation
- Design of Water Supply System-High Rise BLDGDocument108 pagesDesign of Water Supply System-High Rise BLDGcris bunagPas encore d'évaluation
- Numerical ModelDocument61 pagesNumerical ModelAlbert AguileraPas encore d'évaluation
- Sti260N6F6 Stp260N6F6: N-Channel 60 V, 0.0024 Ω, 120 A Stripfet™ Vi Deepgate™ Power Mosfet In To-220 And I²Pak PackagesDocument14 pagesSti260N6F6 Stp260N6F6: N-Channel 60 V, 0.0024 Ω, 120 A Stripfet™ Vi Deepgate™ Power Mosfet In To-220 And I²Pak PackagesRyn YahuFPas encore d'évaluation
- 1 s2.0 0304386X9190055Q MainDocument32 pages1 s2.0 0304386X9190055Q MainJordan Ulloa Bello100% (1)
- Pre Calculus MIdTermsDocument5 pagesPre Calculus MIdTermsLamette Austria Ayong0% (1)
- AtomDocument15 pagesAtomdewi murtasimaPas encore d'évaluation
- 4$20 Triangles$20 ProofsDocument23 pages4$20 Triangles$20 ProofsBaskaran SeetharamanPas encore d'évaluation
- Surface Mount Multilayer Varistor: SC0805ML - SC2220ML SeriesDocument8 pagesSurface Mount Multilayer Varistor: SC0805ML - SC2220ML SeriesTalebPas encore d'évaluation
- Chem Cheat Sheet MasterDocument6 pagesChem Cheat Sheet MasteradamhamelehPas encore d'évaluation
- (Frankel 1962) The Production Function in Allocation and GrowthDocument29 pages(Frankel 1962) The Production Function in Allocation and GrowthT-roy Taylor100% (1)
- 1982 International Rectifier Hexfet Databook PDFDocument472 pages1982 International Rectifier Hexfet Databook PDFetmatsudaPas encore d'évaluation
- Afroasiatic LanguagesDocument13 pagesAfroasiatic Languagesaskask2Pas encore d'évaluation
- E5 - Geotextiles TDR - Rev00Document2 pagesE5 - Geotextiles TDR - Rev00Mohd Radzi MustaffaPas encore d'évaluation
- Physics Gcse Coursework Resistance of A WireDocument8 pagesPhysics Gcse Coursework Resistance of A Wiref5dq3ch5100% (2)
- Lab Manual of Hydraulics PDFDocument40 pagesLab Manual of Hydraulics PDFJULIUS CESAR G. CADAOPas encore d'évaluation
- Fluid Mech. 2Document32 pagesFluid Mech. 2Leslie Owusu MensahPas encore d'évaluation
- Data Cable Containment SizingDocument21 pagesData Cable Containment SizingAngelo Franklin100% (1)
- Final ProjectDocument4 pagesFinal ProjectChacho BacoaPas encore d'évaluation
- Design of Helical Pier Foundations in Frozen GroundDocument6 pagesDesign of Helical Pier Foundations in Frozen GroundCortesar ManuPas encore d'évaluation
- Failure Mode and Effects Analysis of A Process of Reflow Lead-Free SolderingDocument5 pagesFailure Mode and Effects Analysis of A Process of Reflow Lead-Free SolderingSRIDHAREEE61Pas encore d'évaluation
- Ace Om 230Document3 pagesAce Om 230michaelliu123456Pas encore d'évaluation
- List of Books s8 ElectiveDocument2 pagesList of Books s8 ElectivemaniPas encore d'évaluation
- 6100 SQ Lcms Data SheetDocument4 pages6100 SQ Lcms Data Sheet王皓Pas encore d'évaluation
- TribunaloLo Ex#6Document14 pagesTribunaloLo Ex#6Jaylou OpondaPas encore d'évaluation
- 1922 A Textbook of Balochi LanguageDocument228 pages1922 A Textbook of Balochi LanguageAnonymous 0ywnNS29EGPas encore d'évaluation
- Case StudyDocument10 pagesCase StudyVintage ArtPas encore d'évaluation
- 00.concrete Mix Design-RailwayDocument38 pages00.concrete Mix Design-RailwaySoundar PachiappanPas encore d'évaluation
- ImmunologyDocument8 pagesImmunologyማላያላም ማላያላም89% (9)