Vous aimerez peut-être aussi
- Normas para Selección de Materiales (DGN, AISI, SAE, ASTM, ASM) .Document5 pagesNormas para Selección de Materiales (DGN, AISI, SAE, ASTM, ASM) .OMAR GUZMANPas encore d'évaluation
- Identificacion de Peligros y Evaluacion De-RiesgosDocument41 pagesIdentificacion de Peligros y Evaluacion De-Riesgossolecita2014100% (3)
- Modelos de valuación de acciones y bonosDocument35 pagesModelos de valuación de acciones y bonosMichael Wolozny50% (4)
- Modelos de valuación de acciones y bonosDocument35 pagesModelos de valuación de acciones y bonosMichael Wolozny50% (4)
- Charla Konrad Peschka - ¿Que Es Arduino y Como Iniciarse en Este Mundo Maker?Document24 pagesCharla Konrad Peschka - ¿Que Es Arduino y Como Iniciarse en Este Mundo Maker?Konrad PeschkaPas encore d'évaluation
- Curso programación centros maquinadoDocument16 pagesCurso programación centros maquinadoepilefPas encore d'évaluation
- Proyecto NXTDocument7 pagesProyecto NXTfelipe rodriguezPas encore d'évaluation
- Manual de Gestión de La Calidad (Libro)Document261 pagesManual de Gestión de La Calidad (Libro)Gabriela Garrone100% (7)
- Manual de Gestión de La Calidad (Libro)Document261 pagesManual de Gestión de La Calidad (Libro)Gabriela Garrone100% (7)
- Laboratorio Electrónica Analógica IDocument3 pagesLaboratorio Electrónica Analógica IProfesor ElectrónicaPas encore d'évaluation
- Brazo RoboticoDocument13 pagesBrazo RoboticoRoberto FiorilloPas encore d'évaluation
- Cartilla RoboticaDocument50 pagesCartilla RoboticaAndres QuirozPas encore d'évaluation
- Tema 2 - Morfología Del RobotDocument44 pagesTema 2 - Morfología Del RobotDulce VelizPas encore d'évaluation
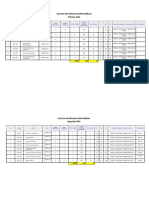
- Tabla de Creditos - Sistemas InformaticosDocument3 pagesTabla de Creditos - Sistemas Informaticosfrkmrd7955Pas encore d'évaluation
- Diseño y Prototipo de Un Robot ExploradorDocument11 pagesDiseño y Prototipo de Un Robot ExploradorFabian VillamarinPas encore d'évaluation
- Perforación Rotary en Mineria Superficial1 PDFDocument36 pagesPerforación Rotary en Mineria Superficial1 PDFRoy Aparicio PeraltaPas encore d'évaluation
- Introduccion A La RoboticaDocument48 pagesIntroduccion A La RoboticaSmith SmithPas encore d'évaluation
- Modelos y Estilos de AprendizajeDocument8 pagesModelos y Estilos de AprendizajeTatiana QuispePas encore d'évaluation
- Planificación didáctica para el desarrollo de competenciasDocument27 pagesPlanificación didáctica para el desarrollo de competenciasEsteli Hernández Vargas100% (1)
- Inteligencia kinestésica y sus característicasDocument8 pagesInteligencia kinestésica y sus característicasJunior Aro PomaPas encore d'évaluation
- Modelo ATRDocument9 pagesModelo ATREduardo ManeiroPas encore d'évaluation
- Cinematica Del RobotDocument28 pagesCinematica Del Robotdrake JonasPas encore d'évaluation
- Leyes de KirchhoffDocument11 pagesLeyes de KirchhoffJeremias Medina TelloPas encore d'évaluation
- s06 THC 560 Axera 5 EsDocument104 pagess06 THC 560 Axera 5 EsJuan Carlos Emmanuel Garcés90% (10)
- Diseño y Prototipado de Una Vivienda Inteligente Con Arduino para El Ahorro de Energia Electrica.Document9 pagesDiseño y Prototipado de Una Vivienda Inteligente Con Arduino para El Ahorro de Energia Electrica.deyachavezrealesPas encore d'évaluation
- Configuracion RIP y OSFPDocument5 pagesConfiguracion RIP y OSFPcaritovaldiviezo0% (1)
- T10 - Protocolos Estado-EnlaceDocument15 pagesT10 - Protocolos Estado-EnlaceRaul Martinez LaraPas encore d'évaluation
- Inteligencia corporal-cinestésica: control del cuerpo, coordinación y expresiónDocument10 pagesInteligencia corporal-cinestésica: control del cuerpo, coordinación y expresiónJohan ApontePas encore d'évaluation
- Protocolos de estado de enlaceDocument42 pagesProtocolos de estado de enlaceIsabel GxPas encore d'évaluation
- CASO de Estudio-2021-1Document4 pagesCASO de Estudio-2021-1DIEGO ALEJANDRO CASTAÑEDAPas encore d'évaluation
- Tipos de ACLDocument2 pagesTipos de ACLPedro QPPas encore d'évaluation
- Modulo 1 Titulo 1 Robotica 1Document7 pagesModulo 1 Titulo 1 Robotica 1angelica joannaPas encore d'évaluation
- Roger S. Pressman (2005) - Ingeniería de Software, Un Enfoque Práctico, PDFDocument4 pagesRoger S. Pressman (2005) - Ingeniería de Software, Un Enfoque Práctico, PDFTeran G Eugenio50% (2)
- Robots Móviles PDFDocument13 pagesRobots Móviles PDFjhonatan96Pas encore d'évaluation
- Guia de Computacion - 5BM - RobóticaDocument11 pagesGuia de Computacion - 5BM - RobóticaRosa DammianoPas encore d'évaluation
- Modelo ConductistaDocument8 pagesModelo ConductistaACA-Prof. Difernecial Yasna Chavez CastilloPas encore d'évaluation
- 1ro SecundariaDocument35 pages1ro Secundariamarlo sislaPas encore d'évaluation
- Los Medios de Comunicacion para Tercero de PrimariaDocument3 pagesLos Medios de Comunicacion para Tercero de PrimariaCristian Ronal Bellido YvalaPas encore d'évaluation
- Leyes de Kirchhoff: Análisis de circuitos eléctricosDocument43 pagesLeyes de Kirchhoff: Análisis de circuitos eléctricosEstefany Julissa Salinas GutierrezPas encore d'évaluation
- Arduino MBlock Programación por bloques Parte 1Document17 pagesArduino MBlock Programación por bloques Parte 1Cristina CostasPas encore d'évaluation
- 1 - IntroduccionDocument79 pages1 - IntroduccionJose YepesPas encore d'évaluation
- Sensores VexDocument11 pagesSensores VexAlfonso Ramos Ibarra100% (1)
- Sensores ÓpticosDocument5 pagesSensores Ópticosrodri2507Pas encore d'évaluation
- Magnitudes Analógicas y DigitalesDocument13 pagesMagnitudes Analógicas y Digitaleshertzon100% (3)
- Clase 6 - Fuentes de Energia, Tension, Corriente y Circuito ElectricoDocument8 pagesClase 6 - Fuentes de Energia, Tension, Corriente y Circuito ElectricoMiguel Ángel Angulo PérezPas encore d'évaluation
- TRIACDocument68 pagesTRIACCarlosPas encore d'évaluation
- Tutorial Robot 2WD Esquiva Objetos (Leantec Robotics&Electronics) .Document5 pagesTutorial Robot 2WD Esquiva Objetos (Leantec Robotics&Electronics) .Œsâr Diaz VargasPas encore d'évaluation
- Diapositivas de RobóticaDocument7 pagesDiapositivas de RobóticaKary CastilloPas encore d'évaluation
- Planificación Anual ElectrónicaDocument22 pagesPlanificación Anual ElectrónicaHuaiquipangui HkiPas encore d'évaluation
- Plan de Trabajo Electronica IDocument27 pagesPlan de Trabajo Electronica IGab100% (1)
- SR1 Robot Movil MultifuncionalDocument7 pagesSR1 Robot Movil MultifuncionalNathy Cristina Grijalva MenaPas encore d'évaluation
- RecomendacionesDocument18 pagesRecomendacionesCarlos PilatasigPas encore d'évaluation
- TeleinformaticaDocument13 pagesTeleinformaticaEdgar RdzPas encore d'évaluation
- Normas Sala de InformaticaDocument1 pageNormas Sala de InformaticaSandra Milena JimenezPas encore d'évaluation
- RobotLab - Guía Didáctica. Plataforma para El Aprendizaje de La Robótica. Educación SecundariaDocument4 pagesRobotLab - Guía Didáctica. Plataforma para El Aprendizaje de La Robótica. Educación Secundariaafi_guzman3909Pas encore d'évaluation
- Robot Laberinto AlgoritmosDocument58 pagesRobot Laberinto AlgoritmosMiguel Alejandro BeltránPas encore d'évaluation
- Presentacion Fundamentos de ElectronicaDocument18 pagesPresentacion Fundamentos de ElectronicaAlexander D. NeblettPas encore d'évaluation
- Análisis de las mejores prácticas de NetflixDocument25 pagesAnálisis de las mejores prácticas de NetflixJose LopezPas encore d'évaluation
- 10VRA-FR-031-Sílabo Versión 2.0 - Internet de Las Cosas y RobóticaDocument34 pages10VRA-FR-031-Sílabo Versión 2.0 - Internet de Las Cosas y RobóticaClaudio Ibarra RiosPas encore d'évaluation
- Carro robótico controlado por BluetoothDocument7 pagesCarro robótico controlado por Bluetoothfabian augusto leal jimenezPas encore d'évaluation
- Siglas UnadDocument4 pagesSiglas UnadLeidicitha Madrigal CPas encore d'évaluation
- 4to de Secundaria RoboticaDocument19 pages4to de Secundaria Roboticamarlo sislaPas encore d'évaluation
- Laboratorio Programación Arduino Control Motores y Seguidor de LíneaDocument4 pagesLaboratorio Programación Arduino Control Motores y Seguidor de LíneaJULIAN CAMILO FLOREZ QUINONESPas encore d'évaluation
- Certificacion de SCEDocument75 pagesCertificacion de SCEtromito2503Pas encore d'évaluation
- Mis Practicas S4ADocument33 pagesMis Practicas S4Alebautista0526100% (1)
- Practica 6Document11 pagesPractica 6gerlen zorillaPas encore d'évaluation
- Cinematica DirectaDocument8 pagesCinematica DirectamikelkatenaPas encore d'évaluation
- 5to A Electrotecnia IIDocument9 pages5to A Electrotecnia IICarlos Nahuel ZaccardiPas encore d'évaluation
- Práctica 3 RobóticaDocument34 pagesPráctica 3 Robóticacharleseli123Pas encore d'évaluation
- Codey-B y El Código Python: El Niño Que Codificó El MundoD'EverandCodey-B y El Código Python: El Niño Que Codificó El MundoPas encore d'évaluation
- Cap 5Document34 pagesCap 5Jessica VereauPas encore d'évaluation
- Cap 5Document34 pagesCap 5Jessica VereauPas encore d'évaluation
- El Valor de La InformacionDocument90 pagesEl Valor de La InformacionJessica VereauPas encore d'évaluation
- The IncotermsDocument6 pagesThe IncotermsJessica VereauPas encore d'évaluation
- 417 Caso KLTDocument1 page417 Caso KLTJessica VereauPas encore d'évaluation
- Liberacion de LotesDocument18 pagesLiberacion de LotesijromerPas encore d'évaluation
- Tesis - Alvarado - Rholand - Gastos No Desducibles TributariamenteDocument137 pagesTesis - Alvarado - Rholand - Gastos No Desducibles TributariamenteGina AguirrePas encore d'évaluation
- Comercio Internacional - RegionalismoDocument15 pagesComercio Internacional - RegionalismoJavier JiménezPas encore d'évaluation
- MarketingDocument2 pagesMarketingJessica VereauPas encore d'évaluation
- Transportes Carretero 2 2 1Document3 pagesTransportes Carretero 2 2 1Luis Eduardo AlcántaraPas encore d'évaluation
- Comercio Internacional - RegionalismoDocument15 pagesComercio Internacional - RegionalismoJavier JiménezPas encore d'évaluation
- Costo BeneficioDocument2 pagesCosto BeneficioIgnacio TrujjilloPas encore d'évaluation
- 9 39 2 PB PDFDocument138 pages9 39 2 PB PDFshassainPas encore d'évaluation
- Resolucion 2004 de 1979Document126 pagesResolucion 2004 de 1979junreymonPas encore d'évaluation
- Caso MRPDocument6 pagesCaso MRPJessica Vereau50% (2)
- Sesion 13Document50 pagesSesion 13pedro33% (3)
- Estructura+CIIU4 Modificada Al 13 11 08Document26 pagesEstructura+CIIU4 Modificada Al 13 11 08rcmendozaePas encore d'évaluation
- Plan Contingencia para Puce SiDocument45 pagesPlan Contingencia para Puce SiJessica VereauPas encore d'évaluation
- Costo CapitalDocument40 pagesCosto CapitalJessica VereauPas encore d'évaluation
- Parte KarinaDocument1 pageParte KarinaJessica VereauPas encore d'évaluation
- Parte KarinaDocument1 pageParte KarinaJessica VereauPas encore d'évaluation
- Guia Basica Sobre SGSSTDocument40 pagesGuia Basica Sobre SGSSTjossy_quispe7821100% (1)
- Perfil Profesional CarpinteriaDocument7 pagesPerfil Profesional CarpinteriaJessica VereauPas encore d'évaluation
- 1111 PDFDocument186 pages1111 PDFJessica VereauPas encore d'évaluation
- Psicologí para EducadoresDocument193 pagesPsicologí para Educadoresbyron86% (7)
- Martemplado MarrevenidoDocument17 pagesMartemplado MarrevenidoMariangel Mora50% (2)
- Exposicion de SuelosDocument54 pagesExposicion de SuelosMaria Alejandra Rivas HuetePas encore d'évaluation
- Guia 16 - Cargas EléctricasDocument11 pagesGuia 16 - Cargas EléctricasAndres RodriguezPas encore d'évaluation
- Movimiento Parabolico ExposicionDocument12 pagesMovimiento Parabolico ExposicionJavier Morales50% (4)
- PRACTICO Balance de MasasDocument2 pagesPRACTICO Balance de Masassorsur50% (2)
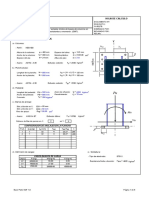
- Plancha Base SMF PDFDocument6 pagesPlancha Base SMF PDFMel ArocutipaPas encore d'évaluation
- InfoPLC Net PLC ProgramacionDocument43 pagesInfoPLC Net PLC Programacionydde123100% (1)
- Termodinamica TermoelectricidadDocument85 pagesTermodinamica Termoelectricidadfabio1199Pas encore d'évaluation
- Energia de La Papa Final.Document14 pagesEnergia de La Papa Final.Diana Patricia Zulueta TorresPas encore d'évaluation
- CedulaDocument2 pagesCedulaYosip Cruz ChoquePas encore d'évaluation
- 10 Problemas Ecuaciones DigitalesDocument16 pages10 Problemas Ecuaciones DigitalesJorge MorePas encore d'évaluation
- Congruencia y Teorema de AngulosDocument3 pagesCongruencia y Teorema de AngulosMATEO ALEXANDRE PAREDES HERRERAPas encore d'évaluation
- Recomendaciones para la conservación de documentos y librosDocument40 pagesRecomendaciones para la conservación de documentos y librosJennifer VerdugoPas encore d'évaluation
- Catalogo Digital DISTINTEC 2010Document131 pagesCatalogo Digital DISTINTEC 2010Jose FranciscoPas encore d'évaluation
- GEOMEMBRANASDocument12 pagesGEOMEMBRANASRichard Barrios GallegosPas encore d'évaluation
- Producto de SolubilidadDocument6 pagesProducto de SolubilidadCarlos Ccopa GPas encore d'évaluation
- Costo mínimo oleoducto petroleraDocument24 pagesCosto mínimo oleoducto petroleraelsa20% (5)
- Linea de Tiempo CromatografiaDocument3 pagesLinea de Tiempo Cromatografiajonathan100% (1)
- Doblado de MetalesDocument6 pagesDoblado de MetalesSantiago Alejandro Palacios AularPas encore d'évaluation
- Reglas de Diseño MICROELECTRONICA - MICROWINDDocument6 pagesReglas de Diseño MICROELECTRONICA - MICROWINDVanessa VásquezPas encore d'évaluation
- Turbina FrancisDocument5 pagesTurbina FrancisLeonelFernandezFernandezPas encore d'évaluation
- Lectura de P&id y Diagramas de Lazo de Instrumenacion 2Document15 pagesLectura de P&id y Diagramas de Lazo de Instrumenacion 2Fausto TapiaPas encore d'évaluation
- Caracterización de FrijolesDocument7 pagesCaracterización de FrijolesAlex PeñaPas encore d'évaluation
- Practica 1 Propagacion de La LuzDocument5 pagesPractica 1 Propagacion de La LuzAntonio Mota FernandezPas encore d'évaluation