Vous aimerez peut-être aussi
- Chapter 7 - Air Ventilation For CombustionDocument7 pagesChapter 7 - Air Ventilation For Combustionpatrick1101Pas encore d'évaluation
- Heat Transfer VacuumDocument25 pagesHeat Transfer Vacuumpatrick1101Pas encore d'évaluation
- Mars Rover "Curiosity": Presented By: Patrick Joshua D. Rivera Jonnel P. AclanDocument21 pagesMars Rover "Curiosity": Presented By: Patrick Joshua D. Rivera Jonnel P. Aclanpatrick1101Pas encore d'évaluation
- Mech 4 - Lecture1 - Problems PDFDocument1 pageMech 4 - Lecture1 - Problems PDFpatrick1101Pas encore d'évaluation
- Plastics Thermoplastics Thermosetting: Rivera, Patrick Joshua D. Perez, JaysonDocument13 pagesPlastics Thermoplastics Thermosetting: Rivera, Patrick Joshua D. Perez, Jaysonpatrick1101Pas encore d'évaluation
- The Yellow House: A Memoir (2019 National Book Award Winner)D'EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Évaluation : 4 sur 5 étoiles4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeD'EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeÉvaluation : 4 sur 5 étoiles4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeD'EverandShoe Dog: A Memoir by the Creator of NikeÉvaluation : 4.5 sur 5 étoiles4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureD'EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureÉvaluation : 4.5 sur 5 étoiles4.5/5 (474)
- Grit: The Power of Passion and PerseveranceD'EverandGrit: The Power of Passion and PerseveranceÉvaluation : 4 sur 5 étoiles4/5 (588)
- On Fire: The (Burning) Case for a Green New DealD'EverandOn Fire: The (Burning) Case for a Green New DealÉvaluation : 4 sur 5 étoiles4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryD'EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryÉvaluation : 3.5 sur 5 étoiles3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceD'EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceÉvaluation : 4 sur 5 étoiles4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItD'EverandNever Split the Difference: Negotiating As If Your Life Depended On ItÉvaluation : 4.5 sur 5 étoiles4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingD'EverandThe Little Book of Hygge: Danish Secrets to Happy LivingÉvaluation : 3.5 sur 5 étoiles3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersD'EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersÉvaluation : 4.5 sur 5 étoiles4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaD'EverandThe Unwinding: An Inner History of the New AmericaÉvaluation : 4 sur 5 étoiles4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnD'EverandTeam of Rivals: The Political Genius of Abraham LincolnÉvaluation : 4.5 sur 5 étoiles4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyD'EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyÉvaluation : 3.5 sur 5 étoiles3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaD'EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaÉvaluation : 4.5 sur 5 étoiles4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerD'EverandThe Emperor of All Maladies: A Biography of CancerÉvaluation : 4.5 sur 5 étoiles4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreD'EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreÉvaluation : 4 sur 5 étoiles4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)D'EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Évaluation : 4.5 sur 5 étoiles4.5/5 (121)
- Her Body and Other Parties: StoriesD'EverandHer Body and Other Parties: StoriesÉvaluation : 4 sur 5 étoiles4/5 (821)
- Systems I Software Iws PDF WebServicesClient NewDocument236 pagesSystems I Software Iws PDF WebServicesClient Newcristopher rodriguezPas encore d'évaluation
- Capstone hk1Document26 pagesCapstone hk1Rkshivavarma DatlaPas encore d'évaluation
- Dbmoto®: Setup Notes For Ibm® Db2® For I Transactional ReplicationsDocument19 pagesDbmoto®: Setup Notes For Ibm® Db2® For I Transactional ReplicationsjoseacvPas encore d'évaluation
- ns2 TutorialDocument28 pagesns2 TutorialManoj Kumar GPas encore d'évaluation
- Identify The Components of A Desktop Computer PDFDocument4 pagesIdentify The Components of A Desktop Computer PDFJunaed AhamedPas encore d'évaluation
- X2 Service ManualDocument107 pagesX2 Service ManualkatjhoPas encore d'évaluation
- Vsphere Design PDFDocument132 pagesVsphere Design PDFcrispajPas encore d'évaluation
- OPNET SimulatorDocument5 pagesOPNET SimulatorJovanni Ivan JabatPas encore d'évaluation
- IPv4 Header FormatDocument10 pagesIPv4 Header FormatDream IASPas encore d'évaluation
- Create SnapshotDocument8 pagesCreate SnapshotShiva Mca0% (1)
- ItlabDocument14 pagesItlabkrishna_cad28Pas encore d'évaluation
- 00-Introduction To CourseDocument2 pages00-Introduction To CourseTuấn Mạnh PhanPas encore d'évaluation
- Practical Question C#Document4 pagesPractical Question C#Vitthal Patil100% (1)
- 2021-08-18 17.09.47 ErrorDocument24 pages2021-08-18 17.09.47 ErrorIslam EleziPas encore d'évaluation
- TITANJET Service ManualDocument3 pagesTITANJET Service ManualHarold Montes100% (1)
- Lenovo Legion 5 15IAH7H: 82RB0000SBDocument2 pagesLenovo Legion 5 15IAH7H: 82RB0000SBVasudev GovindanPas encore d'évaluation
- New Microsoft PowerPoint PresentationDocument17 pagesNew Microsoft PowerPoint PresentationGaurav SinghPas encore d'évaluation
- Microprocessor & Microcontroller: (Assignment Report)Document13 pagesMicroprocessor & Microcontroller: (Assignment Report)Ahsan Murtaza MalikPas encore d'évaluation
- Title Build Network Topology and Configure Static Routing in Network Topology. (CLO-4, PLO-9)Document4 pagesTitle Build Network Topology and Configure Static Routing in Network Topology. (CLO-4, PLO-9)Hadia RashidPas encore d'évaluation
- Be Summer 2022Document1 pageBe Summer 2022SAL20IT 6036 PARTH KALSARIYAPas encore d'évaluation
- AMERICAN MonitorUsersGuideDocument7 pagesAMERICAN MonitorUsersGuideAbraão MunizPas encore d'évaluation
- Sinus Penta SW Uk R03 Web PDFDocument317 pagesSinus Penta SW Uk R03 Web PDFTiago FernandesPas encore d'évaluation
- DNA ComputingDocument16 pagesDNA ComputingUsman AnwarPas encore d'évaluation
- Wirenboard6 DatasheetDocument7 pagesWirenboard6 DatasheetAhmed El ShaariPas encore d'évaluation
- Vibration Analysis For Large-Scale Wind Turbine Blade Bearing Fault Detection With An Empirical Wavelet Thresholding MethodDocument24 pagesVibration Analysis For Large-Scale Wind Turbine Blade Bearing Fault Detection With An Empirical Wavelet Thresholding MethodAkash RockPas encore d'évaluation
- Consola YAMAHA EMX5016CFDocument6 pagesConsola YAMAHA EMX5016CFSamuel LópezPas encore d'évaluation
- Computer ComponentsDocument8 pagesComputer ComponentsbrbioinfoPas encore d'évaluation
- Freelance 2019: Engineering Manual Process StationsDocument160 pagesFreelance 2019: Engineering Manual Process StationsMathias MollePas encore d'évaluation
- MPPT Proposal 248 PDFDocument31 pagesMPPT Proposal 248 PDFajmaltkPas encore d'évaluation
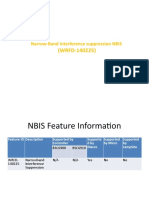
- Narrow-Band Interference Suppression (NBIS)Document20 pagesNarrow-Band Interference Suppression (NBIS)monem777Pas encore d'évaluation